Изобретение относится к авиационной технике и может быть использовано при уборке наполненных средой замкнутых полых гибких систем, буксируемых за движущимся объектом, в том числе обладающих аэростатической силой.
| .- ..-
Целью изобретения является повышение безопасности уборки наполненной средой подай гибкой системы,
На фиг. I изображено устройство в выпущенном положении, общий вид; на фиг, 2 - устройство в убранном положении, общий вид; на фиг. 3 - узел I на фиг. 2; на фиг. 4 вид А на фиг. 3; на фиг. 5 - вид Б на фиг, 4; на фиг. 6 - конструкция передних направляющих роликов; на фиг, 7 - вид
8на фиг. 6; на фиг. 8 - конструк- ция направляющих роликов; на фиг. 9- .система управления заслонкой.
Предложенный способ может быть проиллюстрирован на примере фи-rv Г
и 2. . ..- .
Способ уборки полой гибкой системы заключается в подтягивании гибкой ей- стены с одновременной стабилизацией по потоку и выпуске из нее среды. При этом при выпуске среды из полой гибкой системы разность давлений внутри полой гибкой системы и снаружи нее поддерживают постоянной.
Устройство для уборки полой гибкой системы содержит расположенный на движущемся объекте 1 привод 2, механизм 3 выпуска среды из полой гибкой системы 4, один конец которой связан через канат 5 со стабилизатором 6 гибкой системы по потоку. ройство также снабжено датчиком 7 разности давлений сред внутри и снаружи полой гибкой системы 4, узлом 8 управления механизмом выпуска .среды из полой гибкой системы и средством
9стабилизации полой гибкой системы. При этом датчик 7 разности давлений сред внутри и снаружи полой гибкой системы 4 связан с входом узла 8 управления механизмом выпуска среды
из полой гибкой системы 4, другой конец гибкой системы соединен с приводом 2, причём механизм 3 выпуска среды из полой гибкой системы 4 выполнен в виде васлонки, размещенной на ее конце, а средство 9 стабилизации по- пой гибкой системы размещено на движущемся объекте I между приводом 2 и стабилизатором 6 гибкой системы по I
с
.
fо
5
0
:
5
30
j 0 е
.
0
потоку с возможностью контактирования с полой гибкой системой 4.
Узел 8 управления механизмом выпуска среды яз гибкой системы 4 имеет суммаягар 10, усилитель I 1, исполнительный .орган 12, датчик 13 угла положения заслонки. При этом усилитель 11 связан с исполнительным органом 12, соединенным через.заслонку с дат- чиком 13 угла положения заслонки. Причем датчик 13 угла положения заслонки и датчик 7 разности давлений сред внутри и снаружи гибкой системы соединены через сумматор 10 с усилителем 11. Средство 9 стабилизации гибкой системы содержит направляющие ролики 14 - 19, размещенные последовательно друг за другом над и под полой гибкой системой 4 Причем оси вращения направляющих роликов 14 - 19 перпендикулярны продольной плоскости движущегося объекта Г. Передние направляющие ролики 14 и 15 размещены на движущемся объекте 1 и контактируют с полой гибкой системой 4, при этом ролик 14 выполнен вращающимся, а ролик 15 - еще и прижимным. Прижимной ролик 15 размещен между полой гиб1 гибкой системой 4 и вращающимся рог; ликом 14. На прижимном ролике-15 имеется средство регулирования его прижатия к полой гибкой системе 4, которое содержит винт 20, пружину 2.1, корпус 22,
./ Стабилизатор 6 гибкой системы 4 по потоку соединен с концевым .узлом 23 через канат 5 и вертлюг 24, Вертлюг 24 предохраняет полую гибкую си стену 4 от скручивания при действии возмущающих моментов от потока воздуха на стабилизатор 6 гибкой системы по потоку. Это позволяет решить задачу повышения безопасности уборки, т.к. в случае скручивания полой гибкой системы 4 невозможно обеспечить устойчивость и уборку гибкой системы. Причальное приспособление 25 содержит закрепленный на движущемся объекте 1 корпус 26, внутри которого расположен демпфер-амортизатор 27, и концевой выключатель 28, обеспечивающий отключение привода 2 и закрепленный на демпфере-амортизаторе 27. На концевом узле 23 установлен упор 29 для контактирования с подвижной частью концевого выключателя 28, Направляющие ролики 16 - 19 могут быть выподJ1482
нены, например, клк укачано на фиг. J и 7. Такое выполнение позволяет обеспечить жесткость полон гибкой системы и ее устойчивость в продольной и бо- - ковой плоскостях.
Заслонка 3 жестко крепится к валу 30, закрепленному в КОНЦРВОМ узле 23 с возможностью поворота вокруг своей оси 31, соединенной посредством втул- JQ ки 32 с осью 33 датчика 13 угла положения заслонки, корпус которого крепится посредством кронштейна 34 к концевому узлу 23. Исполнительный орган 12, например передвижной механизм 15 с выходным штоком 35, шарнирно закреплен на концезом узле 23, а выходной шток 35 связан через тягу 36 с валом 30. Датчик 7 разности давлений сред внутри и снаружи гибкой системы за- 20 креплен на концевом узле 23. Крепление каната 5 к концевому узлу 23 гнб- 1КОЙ системы может осуществляться, например, с помощью стержня 37, жестко закрепленного в отверстии концевого 25 узла 23. Конец каната 5 заделан на коуш вокруг стержня 37. Ограничение перемещения каната 5 вдоль стержня , 37 может осуществляться, например, с помощью втулок 38, закрепленных на 30 стержне 37.
Привод 2 может быть выполнен, например, в виде электрической лебедки, .содержащей двигатель 39 с барабном 40, соединенные между собой, напри- « мер, зубчатой (ременной и др.) передачей 41, и тормоз. Усилитель 11 с сумматором 10 могут быть установлены в движущемся объекте, а электричес- кий кабель 42, необходимый для функ- Q циоиироваяия системы управления за. слонкой и расположенный между движущимся объектом и датчиком 13 с исполнительным органом 12, размещенным на концевом узле 23.гибкой системы, мо- жет крепиться к полой гибкой системе 4, например, с помощью второй оболочки, образующей с гибкой системой вну тренний канал заданного диаметра.
Устройство, реализующее способ, работает следующим образом.
В исходном положении полая гибкая (система 4 выпущена из движущегося объекта I и располагается по потоку посредством стабилизатора 6 полой . гибкой системы до потоку, связанного через канат 5, вертлюг 24 с концевым узлом 23 гибкой системы 4. С движущегося объекта 1 подается сигнал на
365
включение привода 2. В .ЧЮЛНРННРГО в виде электрической лебедки. При тгом вял электродвигателя 39 снимается с тормоза и ползя гибкая система 4 начинает наматываться на барабан 40 с помощью, например, чубчдтой передачи 41. Одновременно с подачей сигнала на включение привода 2 включается система управления заслонкой. При перемещении гибкой системы 4 через сред-- ство 9 стабилизации гибкой системы повышается давление PI среды внутри гибкой системы 4; Сигнал с датчика 7 разности давлений сред внутри И снаружи гибкой системы UP Р - Р$. поступает по кабелю 42 на вход сумматора 10 и далее через усилитель 11 и кабель 42 - на исполнительный орган 12, поворачивающий заслонку на угол, обеспечипаклций требуемый расход через заслонку.-Угол отклонения заслонки фиксируется датчиком 13 угла положения заслонки, сигнал с которого поступает по кабелю 42 на другой вход сумматора 10. Ори догтчженки требуемого угла положения заслонки напряжение д11 U4 - U4 на выходе усилителя П становится равньм нулю при ДР - Р - 2 0. При дальнейшем подтя гивании гибкой системы 4 ч намотке ее участка, расположенного между барабаном 40 привода 2 и средством 9 стабилизации гибкой системы, на барабан 40 и в случае изменения давления внутри Р или снаружи Рг гибкой системы изменяется сигнал с датчика 7 разности давлений сред внутри и снаружи гибкой системы 4, что приводит к изменению положения заслонки и1 .регулированию расхода воздуха через нее. Выпуск среды из гибкой системы осуществляется с помощью средства 9 Стабилизации гибкой системы, одновременно выполняющего функцию обеспечения жесткости гибкой системы. При этом гибкая система 4 проходит через направляющие ролики 14 и 15. Посредством средства регулирования прижатия регулируется зазор между роликами 14 и 15, а следовательно, и толщина гибкой системы с выпущенной средой и наматываемой на барабан 40 привода 2. При защемлении гибкой системы 4 посредством направляющих роликов 14 и 15 гибкая система 4 предста- ,вляет собой консольную балку с защем- ленным концом, которая колеблется в потоке. Для сохранения жесткости гибкой системы 4 устанавливаются дополнительные профилированные направляющие ролики 16 - 19, которые обеспечивают постепенно уменьшение сечения гибкой системы, что ограничивает перемещение гибкой системы в продольной плоскости, а за счет профилирования ограничивается перемещение гибкой системы в боковой плоскости движущегося объекта I. При достижении концевым узлом 23 причального приспособления 25 пружина демпфера-амортизатора 27, расположенного в корпусе 26, сжимается и при натяжении упора 29 концевого узла 23 на подвижную часть концевого выключателя 28 последний срабатывает и отключает двигатель 39 привода 2 и систему управления заслонкой 3, При этом вал двигателя 39 становится на тормоз. Стабилизатор 6 гибкой системы по потоку, выполненный в виде парашюта или тормозного конуса, при посадке движущегося объекта может, например, отстреливаться и т.д. Таким образом, гибкая система 4 убрана.
Формула изобретения
1. Способ уборки полой гибкой си- стемь, заключающийся в подтягивании гибкой системы с одновременной стабилизацией по потоку и выпуске из нее
л и чающееся тем, что оно снабжено датчиком разности давлений сред внутри и снаружи полой гибкой
системы, узлом управления механизмом выпуска среды из полой гибкой системы и средством стабилизации полой гибкой системы, при этом датчик раз-- ности давлений сред внутри и снаружи
полой гибкой системы связан с входом узла управления механизмом выпуска среды из полой гибкой системы, выход которого кинематически связан с механизмом выпуска среды из полой гибкой
системы, другой конец которой соединен с приводом, причем механизм выпуска среды из полой гибкой системы выполнен в виде заслояки, размещенной на ее конце, а средство стабилизации
полой гибкой системы размещено на дви- движущемся объекте между приводом и стабилизатором полой гибкой системы по потоку с возможностью контактирования с полой гибкой системой.
3. Устройство по п. 2, отличающееся тем, что узел управления механизмом выпуска среды из полой гибкой системы снабжен сум-«- матором, усилителем, исполнительным
органом, датчиком угла положения заслонки, при этом усилитель связан с исполнительным органом, соединенным через заслонку с датчиком угла положения заслонки, причем датчик угла


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выпуска полой гибкой системы и устройство для его осуществления | 1987 |
|
SU1475292A1 |
| Устройство для буксировки гибких систем | 1987 |
|
SU1496165A1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Устройство для выпуска расположенных друг в друге буксируемых тел | 1988 |
|
SU1655067A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
| Способ выпуска гибкой системы и устройство для его осуществления | 1987 |
|
SU1517272A1 |
| Способ выпуска буксируемой гибкой системы и устройство для его осуществления | 1988 |
|
SU1727326A1 |
| Устройство для выпуска гибкой системы | 1987 |
|
SU1578975A2 |




Изобретение относится к авиационной технике и может быть использовано при уборке наполненных средой, .замкнутых полых гибких систем, буксируемых за движущимся объектом. Цель изобретения - повьшение безопа- ,сности уборки наполненной средой полой гибкой системы. Способ основан 39 и г на подтягивании полой гибкой системы с одновременной стабилизацией по потоку и выпуске из нее среды.. Для достижения поставленной цели при выпуске среды из полой гибкой системы разность давлений внутри полой гибкой системы и снаружи нее поддерживают постоянной. Устройство содержит на движущемся объекте 1 привод 2, механизм 3 выпуска среды из полой гибкой системы 4, канат 5 со стабилизатором 6, вертлюг 24, Для достижения поставленной цели механизм 3 выпуска среды нэ полой гибкой систе-4 мы 4 выполнен в ьаде заслонки на концевом узле 23. Устройство снабжено средством 9 стабилизации полой гибкой системы. Привод 2 содержит двигатель 39 с барабаном 40, соединенные между собой передачей 41. 2 с. и 2 з.п, , ф-лы, 9 ил. V С s Фиг.)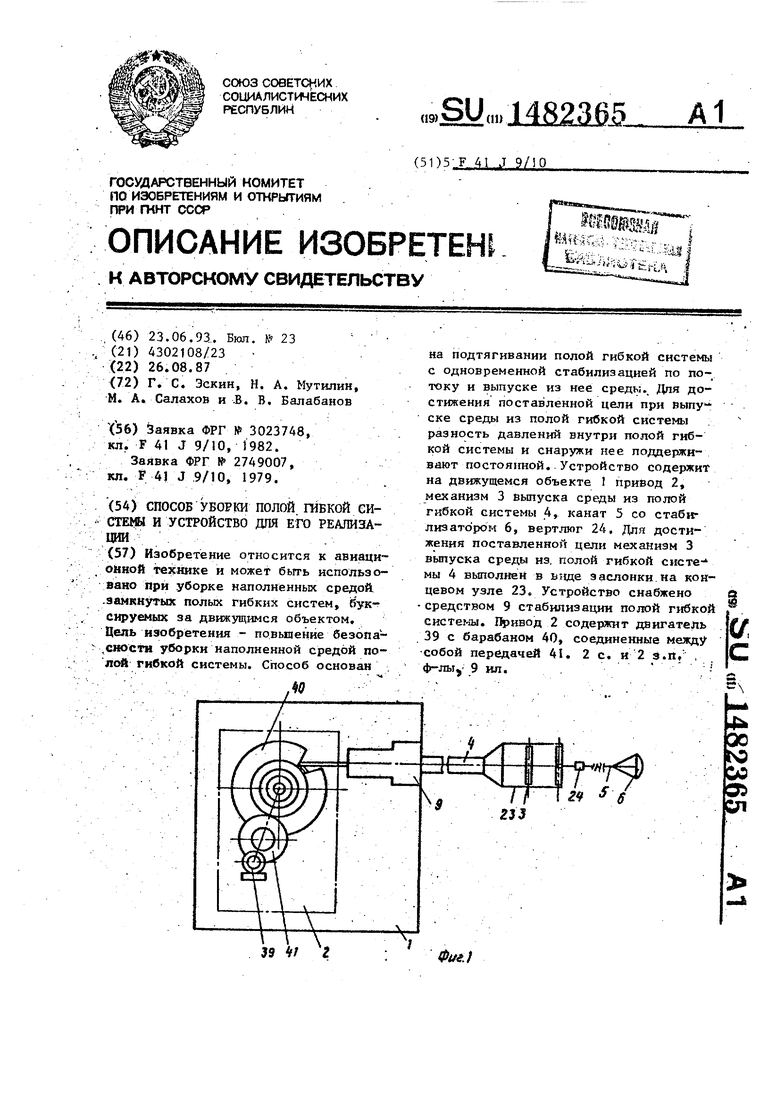
среды, отличающийся тем, 35 положения заслонки и датчик разности что, с целью повышения безопасности уборки наполненной средой полой гибкой системы, при выпуске среды из полой гибкой системы разность давлений внутри полой гибкой системы и снаружи 40 нее поддерживают постоянной.
|гибкой системы, содержащее расположенный на движущемся объекте привод-,
механизм выпуска среды из полой гибкой системы, один конец которой связан через канат со стабилизатором полой гибкой системы по потоку, о т 45
давлений сред Внутри и снаружи полой гибкой системы соединены через сумматор с усилителем, i
положения заслонки и датчик разности
давлений сред Внутри и снаружи полой гибкой системы соединены через сумматор с усилителем, i
Ј
f4
оо
fc
s:
я
гчэ
Ј- со
f-O
о; о v
dud A
Фив. 4
3S
n
w
ч
$
/,«/(Wr/W лищ-t/i
и
ю
р.
/з
