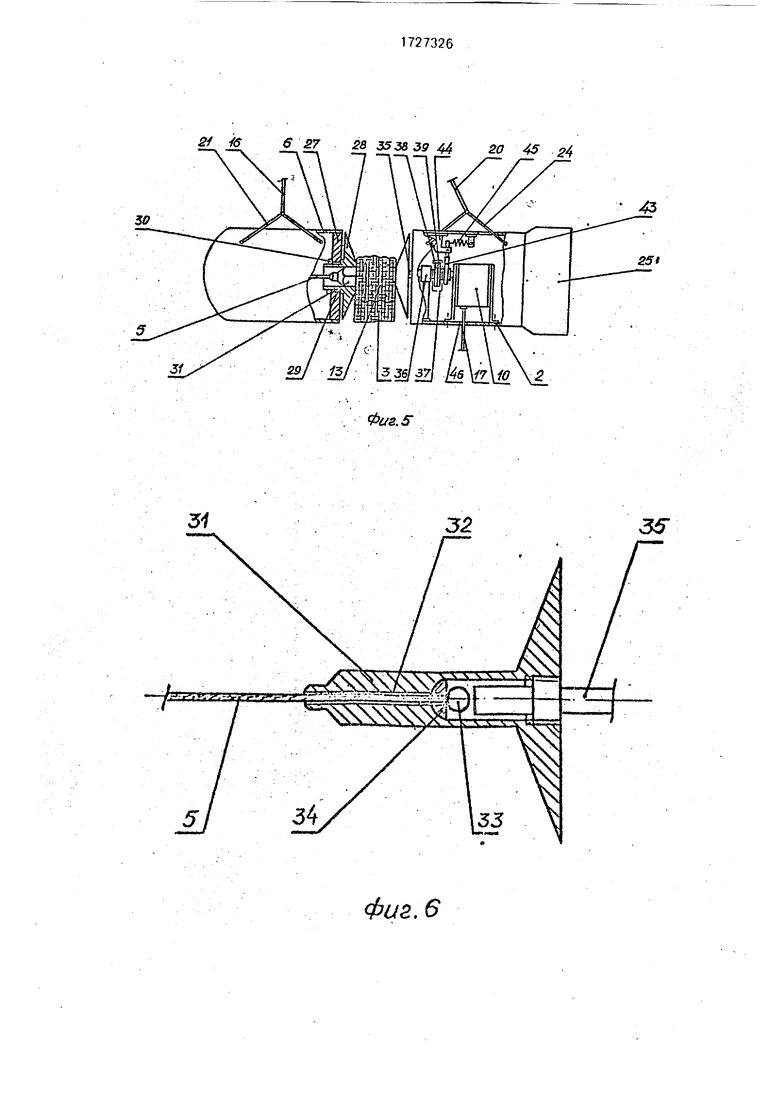
вании 36. которое закреплено в стабилизаторе 2 гибкой системы по потоку.
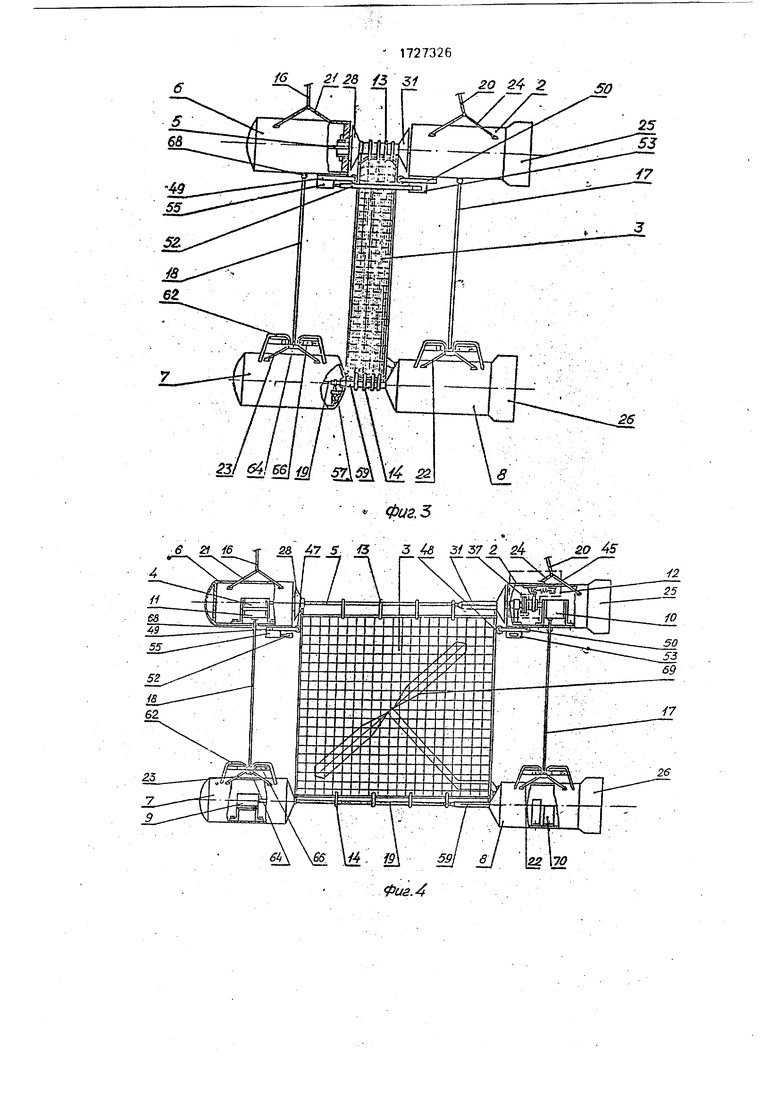
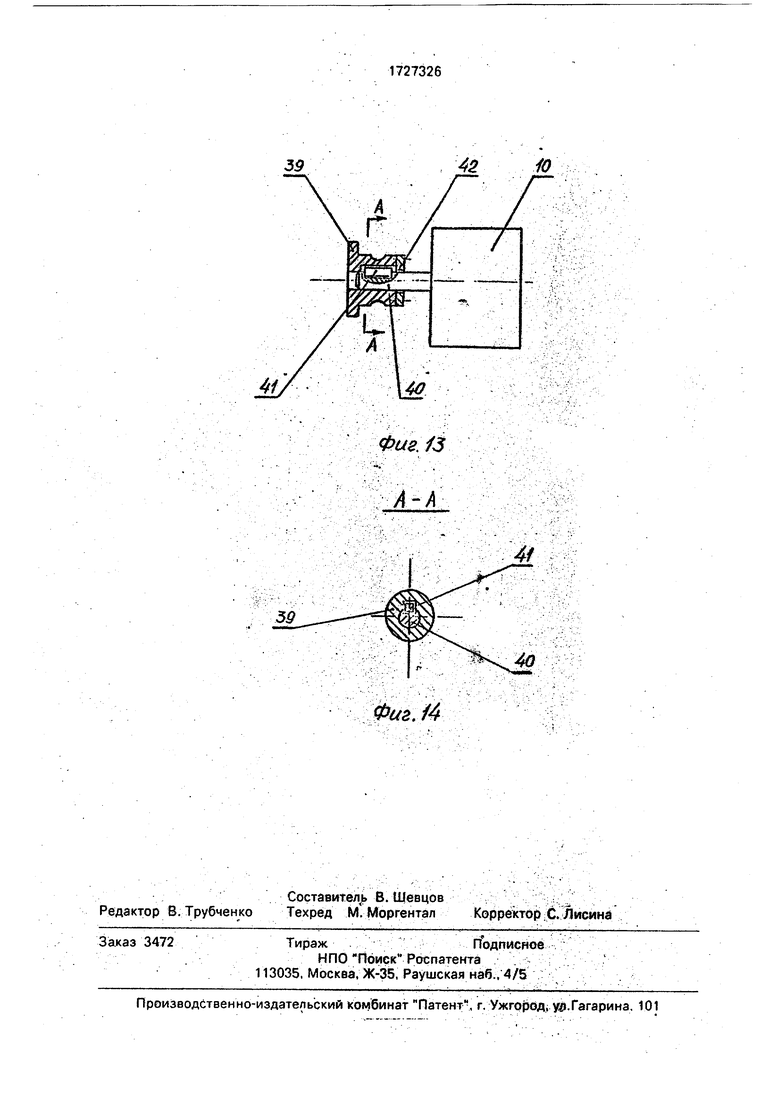
Синхронизатор 12 развертывания тиб- кой системы в вертикальном направлении выполнен в виде фрикционной муфты 37, состоящей из двух втулок 38 и 39, одна из которых 38 жестко закреплена на валу 35, а другая 39 выполнена с возможностью перемещения вдоль вала 40 по шпонке 41. С одной из сторон втулки 39 закреплена крышка 42.
Втулка 39 имеет паз, в котором расположена вилка 43, шарнирно закрепленная в корпусе 44. Свободный конец вилки 43 через пружину 45 связан со стабилизатором 2 гибкой системы по потоку, который имеет отверстие 46 для дополнительной гибкой связи 17.
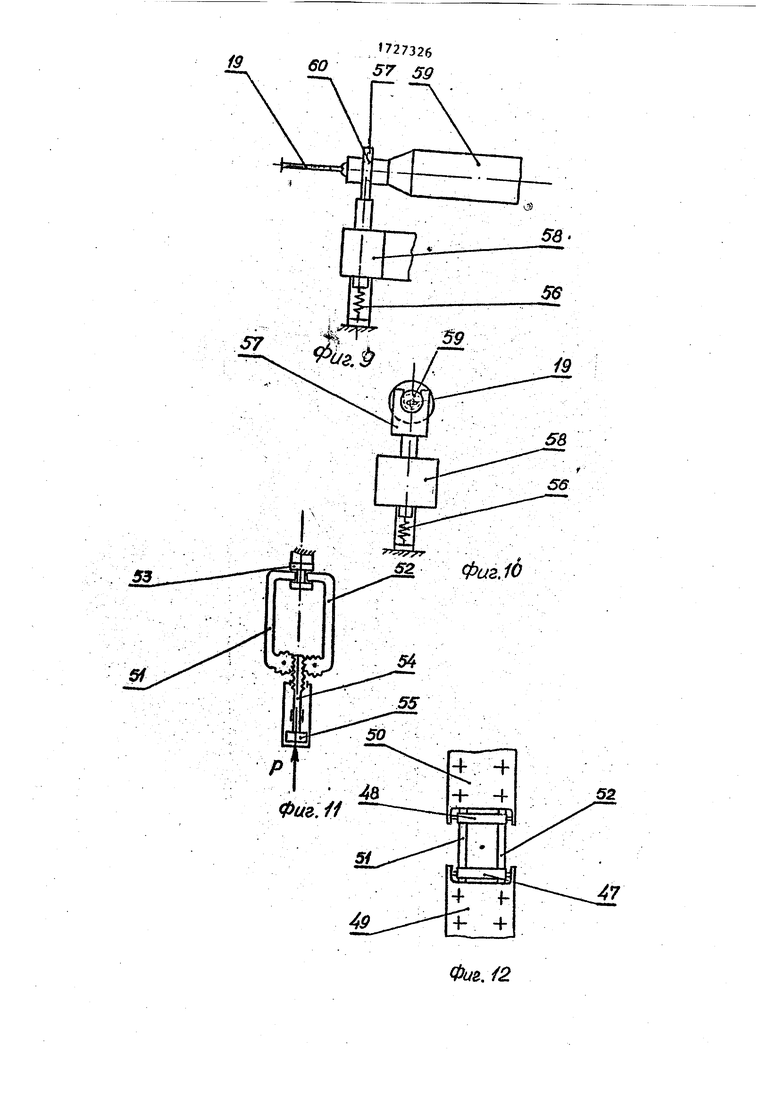
Для удобства укладки гибкой системы 3 на барабан предусмотрено окно, состоящее из двух роликов 47, 48, закрепленных на основаниях 48. 50, установленных соответственно на несущем модуле 6 и стабилизаторе 2 гибкой системы по потоку, и двух Г-рбразных.рычагов 51.52, с одной стороны входящих в паз замка 53, а с другой стороны выполненных в виде зубчатых сегментов, контактирующих с продольной зубчатой рейкой 54, связанной с приводом 55.
Фиксация дополнительного стабилизатора 8 гибкой системы по потоку в несущем модуле 7 осуществляется с помощью подпружиненной упругим элементом 56 вилки 57, управляемой электромагнитом 58, и контактирующей с направляющей 59, которая имеет кольцевую канавку 60.
Направляющая 59 закреплена на дополнительном стабилизаторе 8 гибкой системы по потоку.
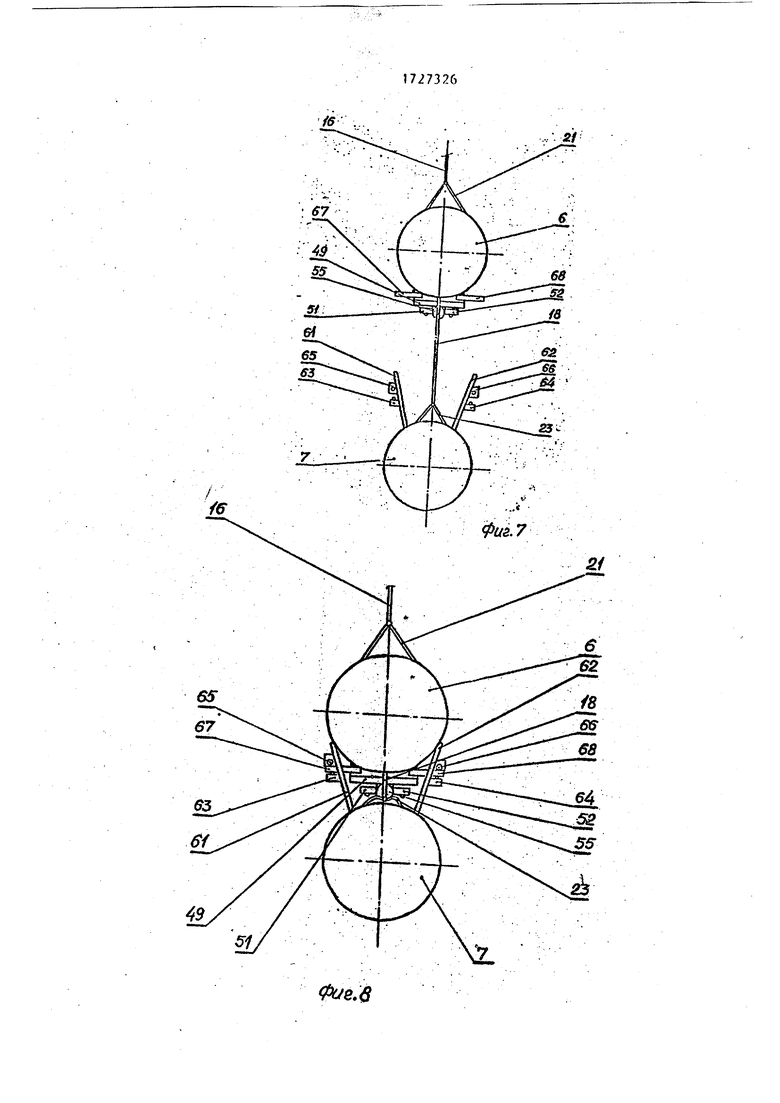
Для стыковки несущих модулей 6 и 7 между собой на несущем модуле 7 установлены трубчатые фигурные ловушки 61, 62, на которых закреплены концевые выключатели 63, 64, предназначенные для отключе ния устройства 11 развертывания гибкой системы в вертикальном направлении при уборке гибкой системы 3, и электрозамки 65, 66, фиксирующие направляющие 67, 68 в ловушках 61, 62..
Конструкция для стыковки стабилизаторов 2 и 8 гибкой системы по потоку выпоя нена так же1 как и для несущих модулей 6 и
7....- . . ,
На гибкой системе 3 может быть размещена, например, плоская антенна 69, датчики для приема энергии и т.д. Аппаратура 70 для связи с плоской антенной, датчиками может быть размещена, например, на дополнительном стабилизаторе 8 гибкой системы.
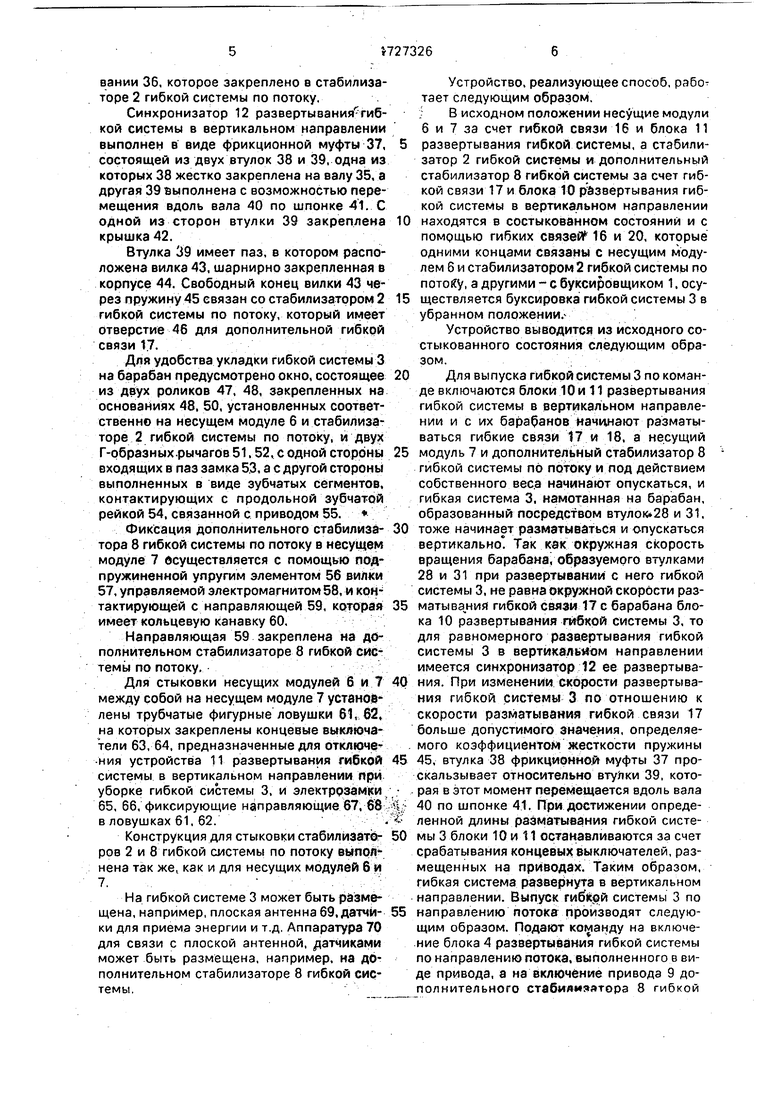
Устройство, реализующее способ, работает следующим образом. ; В исходном положении несущие модули 6 и 7 за счет гибкой связи 16 и блока 11 5 развертывания гибкой системы, а стабилизатор 2 гибкой системы и дополнительный стабилизатор 8 гибкой системы за счет гибкой связи 17 и блока 10 развертывания гибкой системы в вертикальном направлении
10 находятся в состыкованном состояний и с помощью гибких связей 16 и 20, которые одними концами связаны с несущим модулем 6 и стабилизатором 2 гибкой системы по потоку, а другими - с буксировщиком 1. осу15 ществляется буксировка гибкой системы 3 в убранном положении/
Устройство выводится из исходного состыкованного состояния следующим образом.
0 Для выпуска гибкой системы 3 по команде включаются блоки 10 и 11 развертывания гибкой системы в вертикальном направлении и с их барабанов начинают разматываться гибкие связи 17 и 18, а несущий
5 модуль 7 и дополнительный стабилизатор 8 гибкой системы по потоку и под действием собственного вес.а начинают опускаться, и гибкая система 3, намотанная на барабан, образованный посредством втулок 28 и 31.
0 тоже начинает разматываться и опускаться вертикально Так как окружная скорость вращения барабана, образуемого втулками 28 и 31 при развертывании с него гибкой системы 3, не равна окружной скорости раз5 матыва ния гибкой связи 17 с барабана блока 10 развертывания гибкой системы 3, то для равномерного развертывания гибкой системы 3 в вертикальном направлении имеется синхронизатор 12 ее развертыва0 ния. При изменении скорости развертывания гибкой системы 3 по отношению к скорости разматывания гибкой связи 17 больше допустимого значения, определяе- . мого коэффициентом жесткости пружины
5 45, втулка 38 фрикционной муфты 37 проскальзывает относительно втулки 39, кото рая в этот момент перемещается вдоль вала
40 по шпонке 41. При достижении определенной длины разматывания гибкой систе0 мы 3 блоки 10 и 11 останавливаются за счет срабатывания концевых выключателей, размещенных на приводах. Таким образом, гибкая система развернута в вертикальном направлении. Выпуск гибкой системы 3 по
5 направлению потока производят следующим образом. Подают команду на включение блока 4 развертывания гибкой системы по направлению потока, выполненного в виде привода, а на включение привода 9 дополнительного стабилизатора 8 гибкой
системы 3. а также на блок 1Ь ориентации гибкой системы в пространстве. При этом с их барабанов начинают сматываться гибкие связи 5, 19 и 20, а стабилизатор 2 гибкой системы по потоку и дополнительный стабилизатор 8 гибкой системы по потоку под действием лобового сопротивления начинают перемещаться в горизонтальном направлении, а вслед за ними начинает перемещаться гибкая система 3 по гибким связям 5 и 19 через элементы 13. 14 и при
Формула изобретения
1.Способ выпуска буксируемой гибкой системы, заключающийся в ее развертывании в вертикальной плоскости по направлению потока, отличающийся тем. что, с целью расширения эксплуатационных возможностей за счет развертывания в пространстве плоской гибкой системы, дополнительно производят развертывание гибкой системы в вёртикальной плоскости в вертикальном направлении.
2.Устройство для выпуска буксируемой гибкой системы, содержащее буксировщик и связанный с ним гибкой связью основной несущий модуль, основной стабилизатор гибкой системы и блок развертывания гибкой системы по направлению потока, отличающееся тем, что оно снабжено до- полнительными несущим модулем и стабилизатором, дополнительным блоком
(развертывания гибкой системы по направлению потока, блоками развертывания | гибкой системы в вертикальном направле: 49.
52
16
&
полном развертывании гибкой системы 3 отключаются блоки 4 и 9 и система полностью развернута. Ориентация гибкой системы 3 в пространстве определяется длиной
гибкой связи 20. Поэтому скорость ее выпуска может быть выбрана исходя из величины времени развертывания гибкой системы 3 по направлению потока и требуемого угла ориентации гибкой системы 3.
(56) Авторское свидетельство СССР № 1612489, кл. В 64 D 3/00. 1987;
нии с синхронизатором развертывания, размещенными на основном несущем модуле и основном стабилизаторе и соединенными вертикальными гибкими связями с дополнительным несущим модулем и дополнительным стабилизатором соответственно, блоком ориентации гибкой системы
в вертикальном направлении, размещенным на буксировщике и соединенным дополнительной гибкой связью с основным стабилизатором, при этом блоки развертывания гибкой системы по направлению потока соединены с основным и дополнительным стабилизаторами через горизонтальные гибкие связи, а основной и дополнительный стабилизаторы снабжены направляющими для размещения и крепления гибкой системы, выполненными с возможностью контактирования с оснрв- ным и дополнительным несущими модулями соответственно.
3. Устройство по п.2, отличающееся тем, что блоки развертывания гибкой сис- | темы по потоку размещены на основном и дополнительном несущих модулях.
& ЗЛ20 24 2
25
Д. JL.S: & ЯЗВ 39 4420 45 24

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ буксировки тел и устройство для его осуществления | 1988 |
|
SU1655068A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Устройство для ориентации буксируемой гибкой системы | 1989 |
|
SU1692082A1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1988 |
|
SU1797238A1 |
| Устройство для выпуска расположенных друг в друге буксируемых тел | 1988 |
|
SU1655067A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Способ выпуска полой гибкой системы и устройство для его осуществления | 1987 |
|
SU1475292A1 |
Фи&.З
Фаг. 6
Фие 13
A A.
Фиг14
