1
Изобретение относится к авиации, в частности к устройствам для захвата и уборки в полете буксируемого тела,
Цель изобретения повьшение безопасности уборки путем размещения устройства в зоне .невозмущенного потока и снабжения его средством само- ориечтирования убираемого тела.
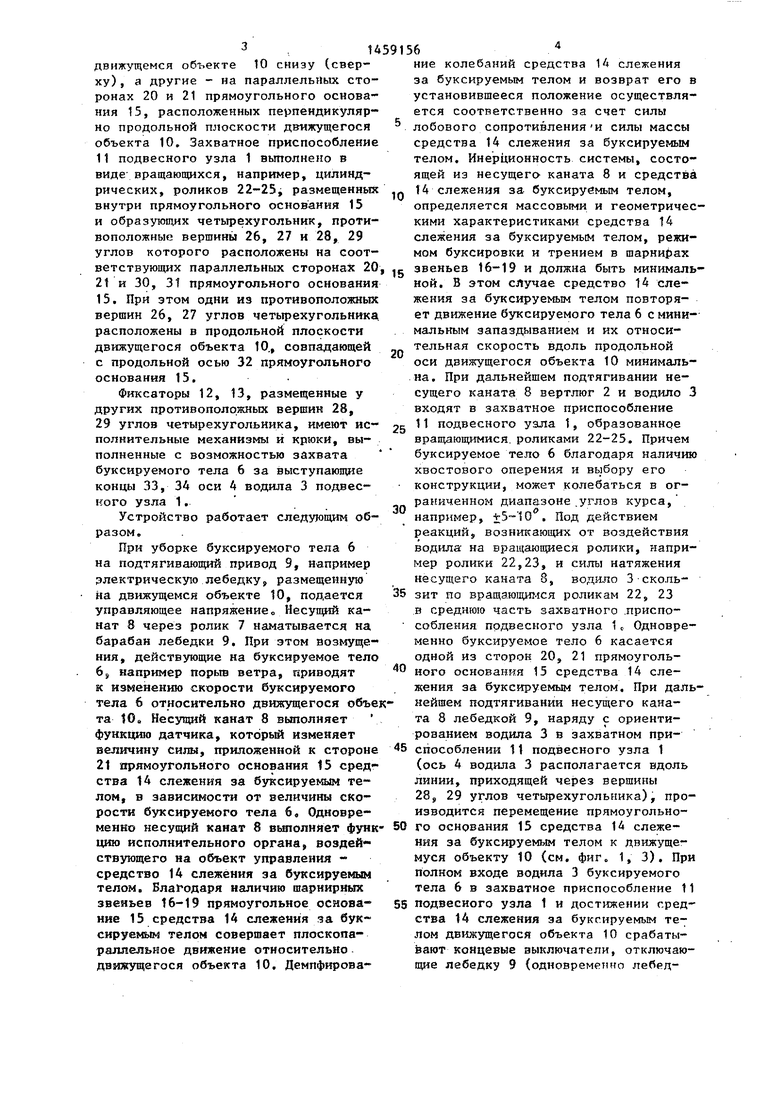
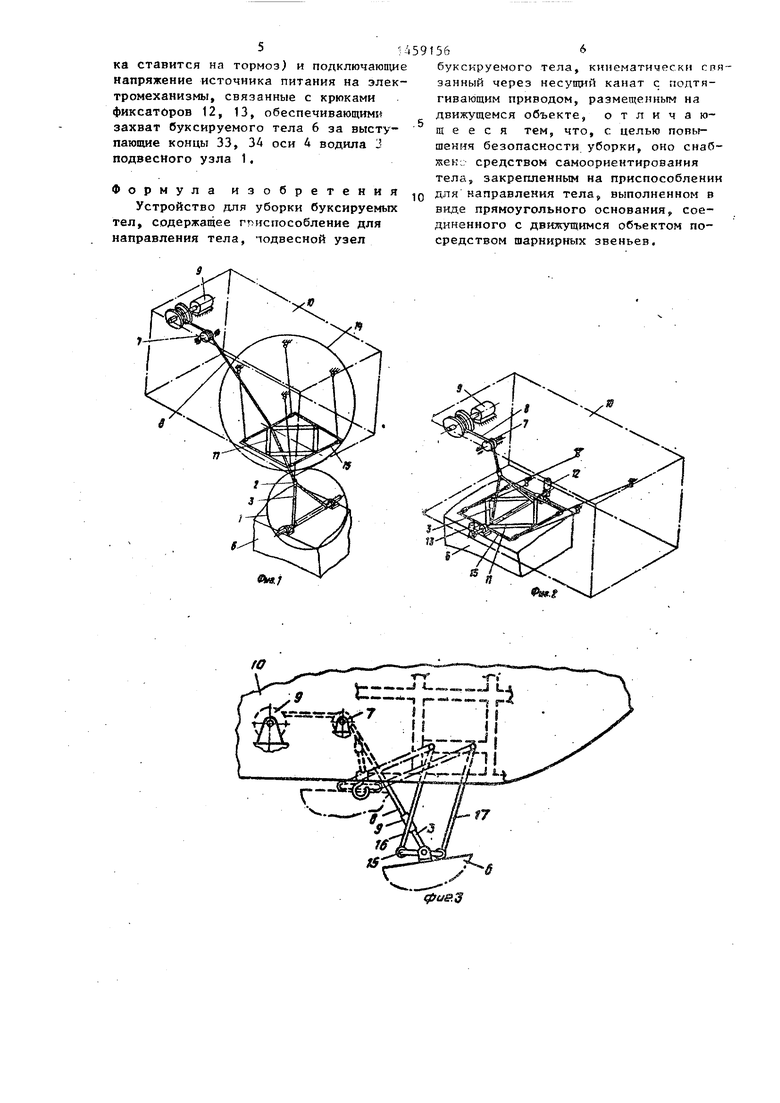
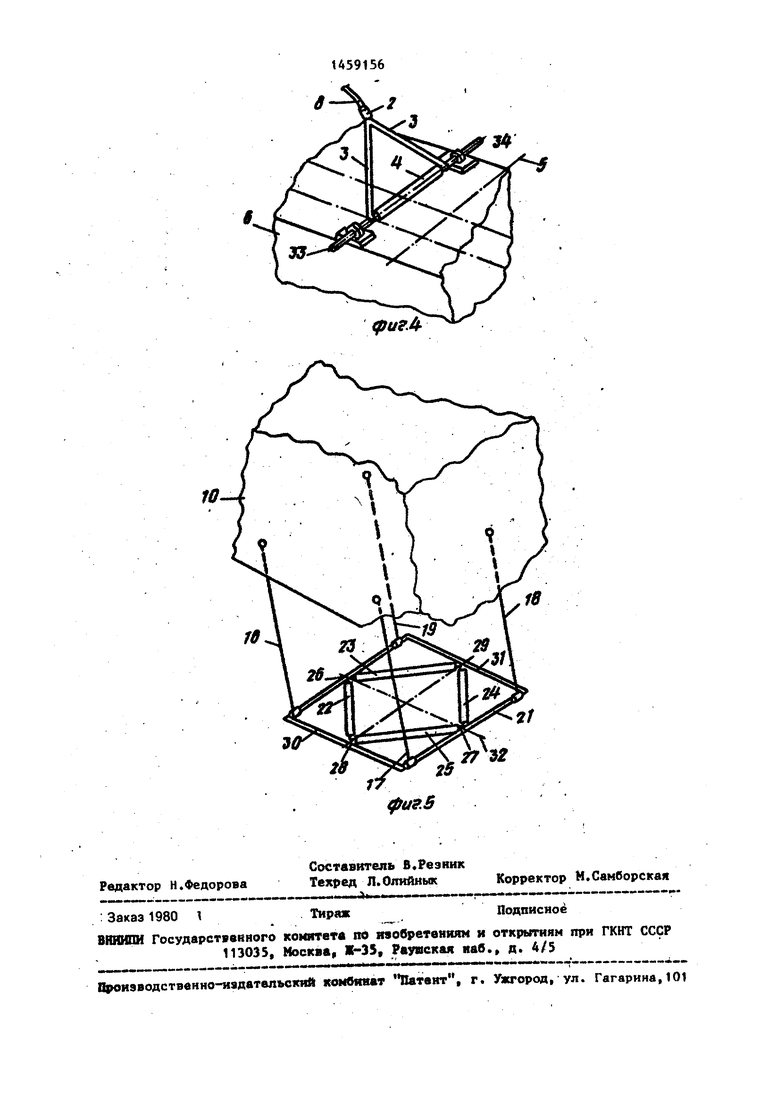
На фиг. 1 представлено устройство в расстыкованном состоянии, общий ВИД} на фиг„ 2 - то же, в состыкованном состоянии; на фиг, 3 - то же, в растыкованном и состыкованном состояниях; на фиг. 4 - конструкция подвесного узла; на фиг, 5 - конструкция средства слежения за буксит руемым телом.
Устройство для уборки буксируемых тел содержит подвесной узел 1, выполненный в виде вертлюга 2 и води-
ла 3, ось 4 вращения которого параллельна поперечной оси 5 буксируемого тела 6, и кинематически связанный чеЬез ролик 7 и несущий канат 8 с подтягивающим приводом (лебедкой)
9,размещенным на движущемся объекте
10,захватное приспособление 11 подвесного узла 1, фиксаторы 12, 13, закрепленные одной стороной на движущемся объекте 10, Устройство снабжено средством 14 слежения за буксируемым телом, закрепленным на движущемся объекте 10, при этом на средстве 14 слежения за буксируемым телом размещено захватное приспособление 11 подвесного узла 1,
Средство 14 слежения за буксируемым телом имеет прямоугольное основание 15 и расположенные параллельно друг другу шарнирные звенья 16-19, одни концы которых закреплены на
ел
со
ел
05
движущемся объекте 10 снизу (сверху) , а другие - на параллельных сторонах 20 и 21 прямоугольного основания 15, расположенных перпендикулярно продольной плоскости движущегося объекта 10, Захватное приспособление 11 подвесного узла 1 выполнено в виде вращающихся, например, цилиндрических, роликов 22-25 размещенных внутри прямоугольного основания 15 и образующих четьфехугольник, противоположные вершины 26, 27 и 28, 29 углов которого расположены на соответствующих параллельных сторонах 20, звеньев 16-19 и должна быть минималь21 и 30, 31 прямоугольного основания 15. При этом одни из противоположных вершин 26, 27 углов четырехугольника, расположены в продольной плоскости движущегося объекта 10., совпадчающей с продольной осью 32 прямоугольного основания 15.
Фиксаторы 12, 13, размещенные у других противоположных вершин 28, 29 углов четырехугольника, имеют исполнительные механизмы и крюки, выполненные с возможностью захвата буксируемого тела 6 за выступающие концы 33, 34 оси 4 водила 3 подвесного узла 1.
Устройство работает следующим образом.
При уборке буксируемого тела 6 на подтягивающий привод 9, например электрическую лебедку, размещенную на движущемся объекте 10, подается управляющее напряжение Несущий канат 8 через ролик 7 наматывается на барабан лебедки 9. При этом возмущения, действующие на буксируемое тело 6j например порыв ветра, приводят к измеиению скорости буксируемого тела 6 относительно движущегося объекта 10 Несзпций канат 8 вьшолняет функцию датчика, который изменяет величину силы, приложенной к сторона 21 прямоугольного основания 15 средства 14 слежения за буксируемым теной. В этом случае средство 14 слежения за буксируемым телом повторяет движение буксируемого тела 6 с минимальным запаздыванием и их относительная скорость вдоль продольной оси движущегося объекта 10 минимальна. При дальнейшем подтягивании несущего каната 8 вертлюг 2 и водило 3 входят в захватное приспособление 25 11 подвесного уэла 1, образованное
20
30
40
вращающимися. роликами 22-25. Причем буксируемое тело 6 благодаря наличию хвостового оперения и выбору его конструкции, может колебаться в ограниченном диапазоне .углов курса, например, . Под действием реакций, возникающих от воздействия водила на вращающиеся ролики, например ролики 22,23, и силы натяжения несущего каната 8, водило 3-сколь35 зит по вращающимся роликам 22, 23
в среднюю часть захватного .приспо- собления подвесного узла 1 с Одновременно буксируемое тело б касается одной из сторон 20, 21 прямоугольного основания 15 средства 14 слежения за буксируемьм телом. При дальнейшем подтягивании несущего каната 8 лебедкой 9, наряду с ориентированием водила 3 в захватном при45 способлении 11 подвесного узла 1 (ось 4 водила 3 располагается вдоль линии, приходящей через вершины 28, 29 углов четырехугольника), производится перемещение прямоугольнолом, в зависимости от величины скорости буксируемого тела 6, Одновре- меино несу1дий канат 8 выполняет фуи цию исполнительного органа, воздействующего на объект управления - средство 14 слежения за буксируемым телом. Благодаря наличию шарнирных звеньев 16-19 прямоугольное основа- иие 15 средства 14 слежения за буксируемым телом совершает плоскопараллельное движение относительно движущегося объекта 10. Демпфирование колебаний средства 1/4 слежения за буксируемым телом и возврат его в установившееся положение осуществляется соответственно за счет силы лобового сопротивления И силы массы средства 14 слежения за буксируемым телом. Инерционность системы, состоящей из несущего каната 8 и средства 14 слежения за буксируемым телом, определяется массовыми и геометрическими характеристиками средства 14 слежения за буксируемьЕМ телом, режимом буксировки и трением в шарнирах
звеньев 16-19 и должна быть минимальной. В этом случае средство 14 слежения за буксируемым телом повторяет движение буксируемого тела 6 с минимальным запаздыванием и их относительная скорость вдоль продольной оси движущегося объекта 10 минимальна. При дальнейшем подтягивании несущего каната 8 вертлюг 2 и водило 3 входят в захватное приспособление 11 подвесного уэла 1, образованное
вращающимися. роликами 22-25. Причем буксируемое тело 6 благодаря наличию хвостового оперения и выбору его конструкции, может колебаться в ограниченном диапазоне .углов курса, например, . Под действием реакций, возникающих от воздействия водила на вращающиеся ролики, например ролики 22,23, и силы натяжения несущего каната 8, водило 3-скользит по вращающимся роликам 22, 23
в среднюю часть захватного .приспо- собления подвесного узла 1 с Одновременно буксируемое тело б касается одной из сторон 20, 21 прямоугольного основания 15 средства 14 слежения за буксируемьм телом. При дальнейшем подтягивании несущего каната 8 лебедкой 9, наряду с ориентированием водила 3 в захватном приспособлении 11 подвесного узла 1 (ось 4 водила 3 располагается вдоль линии, приходящей через вершины 28, 29 углов четырехугольника), производится перемещение прямоугольного основания 15 средства 14 слежения за буксируемым телом к движущемуся объекту 10 (см. фиг. 1, 3). При полном входе водила 3 буксируемого тела 6 в захватное приспособление 11
подвесного узла 1 и достижении средства 14 слежения за буксируемым телом движущегося объекта 10 срабаты- йают концевые выключатели, отключающие лебедку 9 (одновременно лебедЛ«/
.1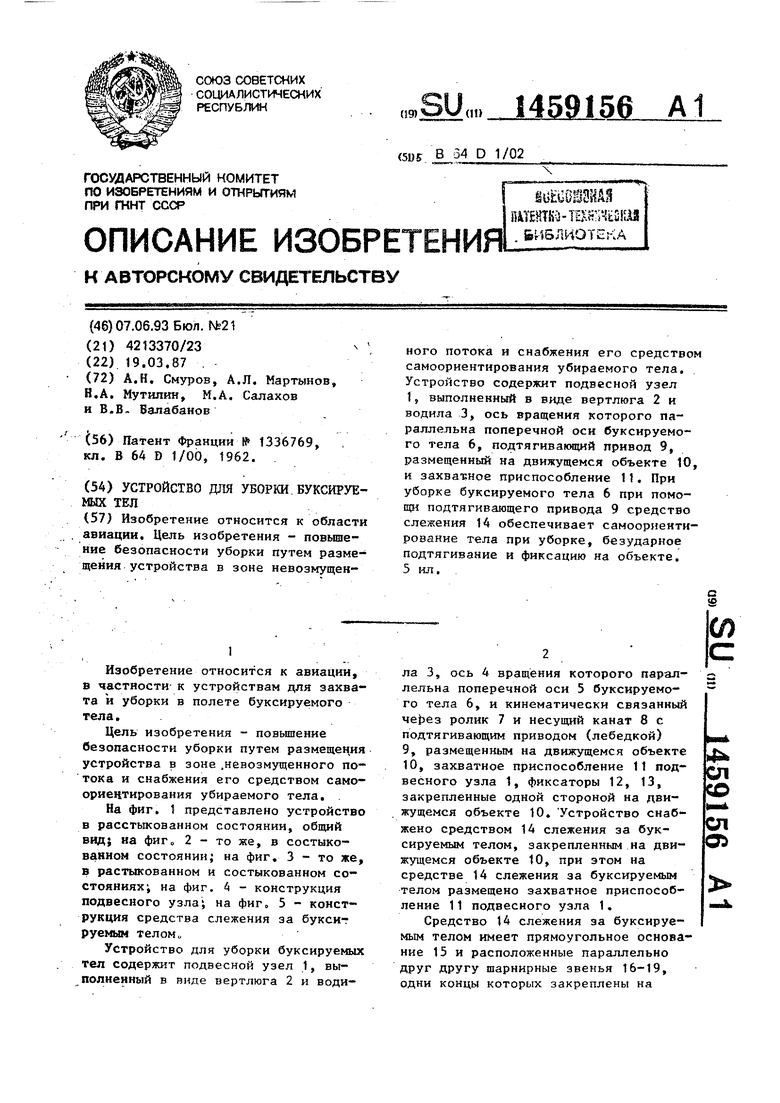
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| Способ уборки полой гибкой системы и устройство для его реализации | 1987 |
|
SU1482365A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| Устройство для буксировки антенной системы | 1987 |
|
SU1462666A1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Устройство для буксировки гибких систем | 1987 |
|
SU1496165A1 |
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1684165A1 |
| Устройство для выпуска расположенных друг в друге буксируемых тел | 1988 |
|
SU1655067A1 |
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1781133A1 |
| Способ определения аэродинамических характеристик тел и устройство для его осуществления | 1986 |
|
SU1462969A1 |
Изобретение относится к области , авиации. Цель изобретения - повышение безопасности уборки путем разме- щения устройства в зоне невозмущенного потока и снабжения его средством самоориентирования убираемого тела. Устройство содержит подвесной узел 15 выполненный в виде вертлюга 2 и водила 3, ось вращения которого параллельна поперечной оси буксируемого тела 6, подтягивающий привод 9, размещенный на движущемся объекте 10, и захва1:ное приспособление 11. При уборке буксируемого тела 6 при помощи подтягивающего привода 9 средство слежения 14 обеспечивает самоориентирование тела при уборке, безударное подтягивание и фиксацию на объекте. 5 ил.
фи&З
re
2/
