Изобретение относится к экспериментальной аэродинамике и может быть использовано при весовых испытаниях моделей.
Целью изобретения является повышение точности определения аэродинамических характеристик.
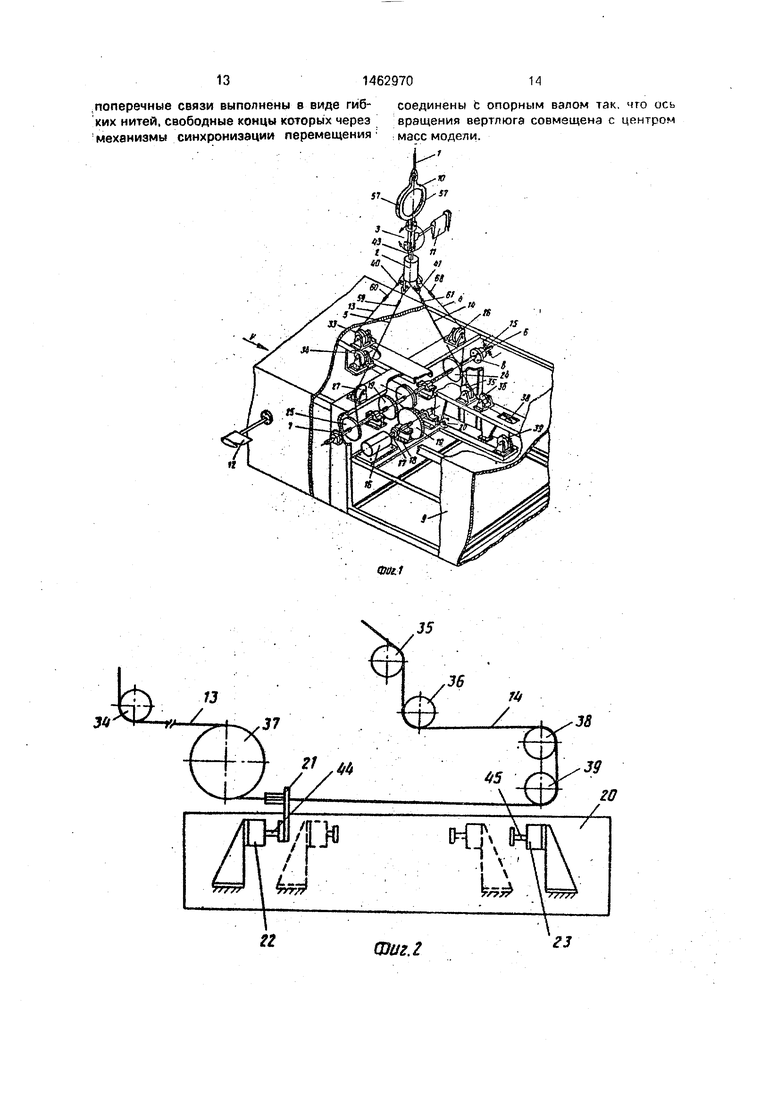
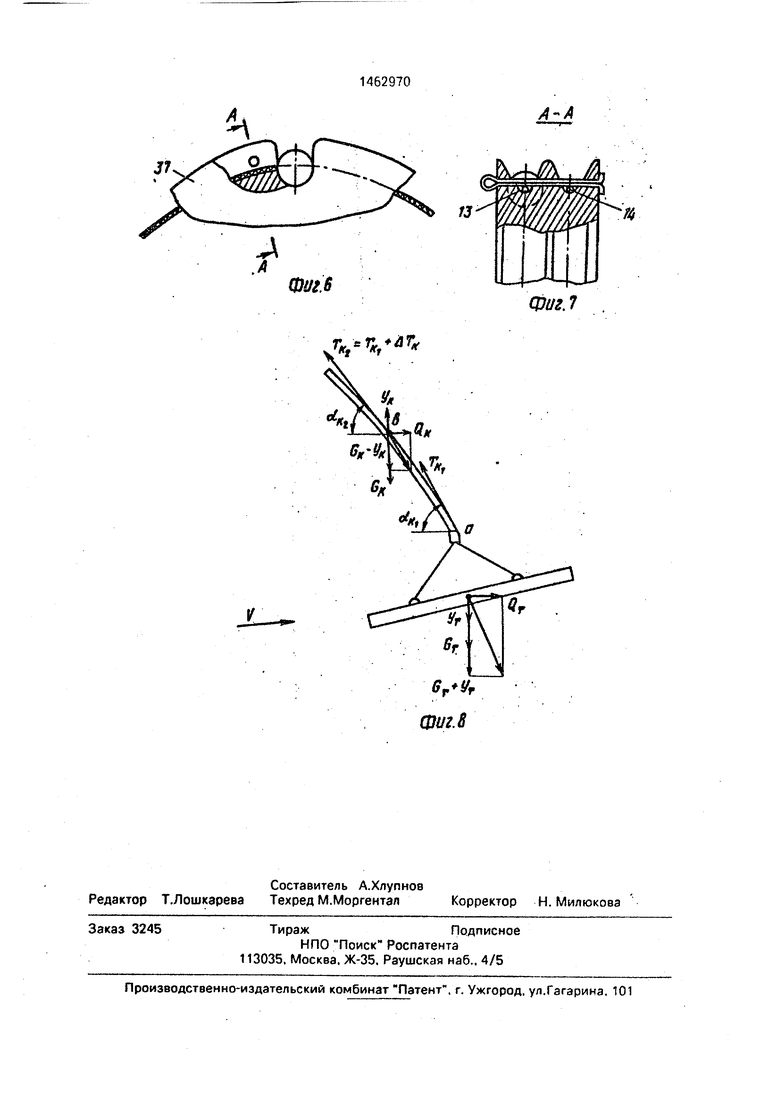
На фиг. 1 приведено устройство для осуществления способа, общий вид; на фиг, 2 - показан рабочий переключатель; на фиг. 3 - схема управления точкой подвеса каната к телу; на фиг, 4 - конструкция расположения вертлюга относительно центра масс тела; на фиг. 5 - конструкция узла крепления вертлюга к канату; на фиг. 6, 7 - задепка концов Стабилизирующих гибких связей на их барабане мамотки и размотки; на фиг. 8 схема действия сил.
Устройство для определения аэродинамических характеристик тел содержит канат 1, вертлюг 2, предназначенный для снятия крутящего момента от канала 1 к боковой плоскости и снабженный узлом 3 креплений канату 1 с верхней стороны, а с нижней стороны - подвесной системой, состоящей из двух ветвей (нитей) 4, 5, опорный вал 6, расположенный и подвижно закрепленный , например, в подшипниках 7,8 в поперечной плоскости тела 9, измеритель (силомерное кольцо) 10 натяжения каната 1, измеритель (датчик) 11 угла атаки каната 1, измеритель (датчик) 12 угла атаки тела 9.
Устройство содержит также стабилизатор колебаний тела 9 и средство балансировки тела 9. причем стабилизатор колебаний тела 9 имеет стабилизирующие гибкие связи (нити) 13, 14 и средство изменения направления стабилизирующих гибких связей 13. 14, а средство балансировки тела 9 имеет электроматнитный .тормоз 15, привод 16, вал 17, муфту 18, передаточный механизм 19, рабочий переключатель 20, выполненный в виде упора 21 и концевых выключателей 22, 23, барабаны 24, 25 намотки и размотки ветвей 4, 5 подвесной системы, направляющие ролики 26, 27 ветвей 4, 5 подвесной системы, управляющие переключатели 28, 29, источник 30 питания, диоды 31, 32.
Средство изменения направления стабилизирующих гибких связей 13, 14 содержит направляющие ролики 33, 34, 35, 36 стабилизирующих гибких связей 13, 14, барабан 37 намотки и размотки стабилизирующих гибких связей 13, 14, закрепленный на опорном валу 6, и передаточные ролики 38,39. Причем направляющие ролики 33,34, .35. 36 стабилизирующих гибких связей 13, 14 и передаточные ролики 38,39 расположены в продольной плоскости тела 9 и размещены попарно один над другим, а концы 40, 41 стабилизирующих гибких связей 13, 14 закреплены на нижней части вертлюга 2. Нижняя часть вертлюга 2 расположена
на расстоянии 0,2-0,3 характерного размера тела 9 от центра масс тела 9, а ось 42 (см. фиг. 4), совпадающая с осью 43 вращения зертлюга 2, проходит через центр масс тела 9.
0 Стабилизирующие гибкие связи 13, 14 контактируют с одной из парой направляющих роликов 33, 34 стабилизирующих гибких связей 13, 14 и через барабан 37 намотки и размотки стабилизирующих гиб5 ких связей 13, 14 - с передаточными роликами 38, 39 и другой парой направляющих роликов 35, 36 стабилизирующих гибких связей 13, 14. Расстояние между участками стабилизирующих гибких связей 13,14, кон0 тактирующих с каждой парой соответствующих направляющих роликов 33, 34, равно 0,6-3.5 характерного размера тела, а гибких связей 13, 14 с нижним передаточным роликом 39 равно 0-2,3 характерного размера
5 телс,9.
При этом ветви 4, 5 подвесной системы через соответствующие направляющие ролики 26, 27. расположенные в поперечной плоскости симметрично продольной пло0 скости тела 9, закреплены на соответствующих барабанах 24, 25 намотки и размотки ветвей 4, 5 подвесной системы. Причем барабаны 24, 25 намотки и размотки ветвей 4, 5 подвесной системы. Причем барабаны 24,
5 25 намотки и размотки ветвей 4, 5 подвесной системы закреплены на опорном валу б и размещены симметрично относительно барабана 37 намотки и размотки стабилизи- гибких связей 13, 14.
0 Расстояние между участками ветвей 4,5 подвесной системы, контактирующих с направляющими роликами 26,27 и барабанами 24, 25 намотки и размотки ветвей подвесной системы, равно 0,6-3,5 характер5 ного размера тела.
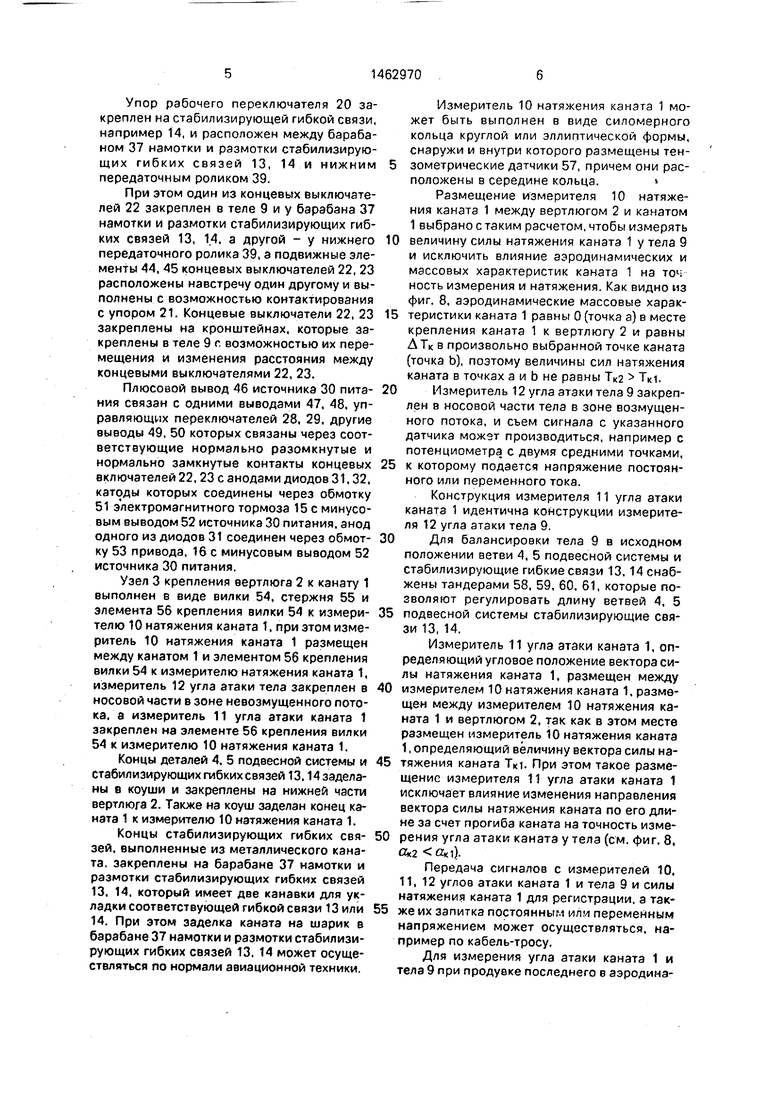
Углы между ветвями 4, 5 подвесной системы м стабилизирующими гибкими связями 13, 14 выполнены с возможностью их изменения в пределах от 145 до 10°, а раз0 ность расстояния (см. фиг. 2) между осями направляющего ролика 36 стабилизирующей гибкой связи 14 и передаточного ролика 39, параллельных продольной оси тела 9. равно наружному диаметру барабана 37 на5 мотки и размотки стабилизирующих гибких связей 13, 14.
Вал 17 привода 16 через муфту 18 и передаточный механизм 19 связан с опорным валом 6. на одном из концов которого размещен электромагнитный тормоз 15.
Упор рабочего переключателя 20 закреплен на стабилизирующей гибкой связи, например 14, и расположен между барабаном 37 намотки и размотки стабилизирующих гибких связей 13, 14 и нижним передаточным роликом 39.
При этом один из концевых выключателей 22 закреплен в теле 9 и у барабана 37 намотки и размотки стабилизирующих гибких связей 13, 1.4, а другой - у нижнего передаточного ролика 39, а подвижные элементы 44, 45 концевых выключателей 22, 23 расположены навстречу один другому и выполнены с возможностью контактирования с упором 21. Концевые выключатели 22, 23 закреплены на кронштейнах, которые закреплены в теле 9 г. возможностью их перемещения и изменения расстояния между концевыми выключателями 22, 23.
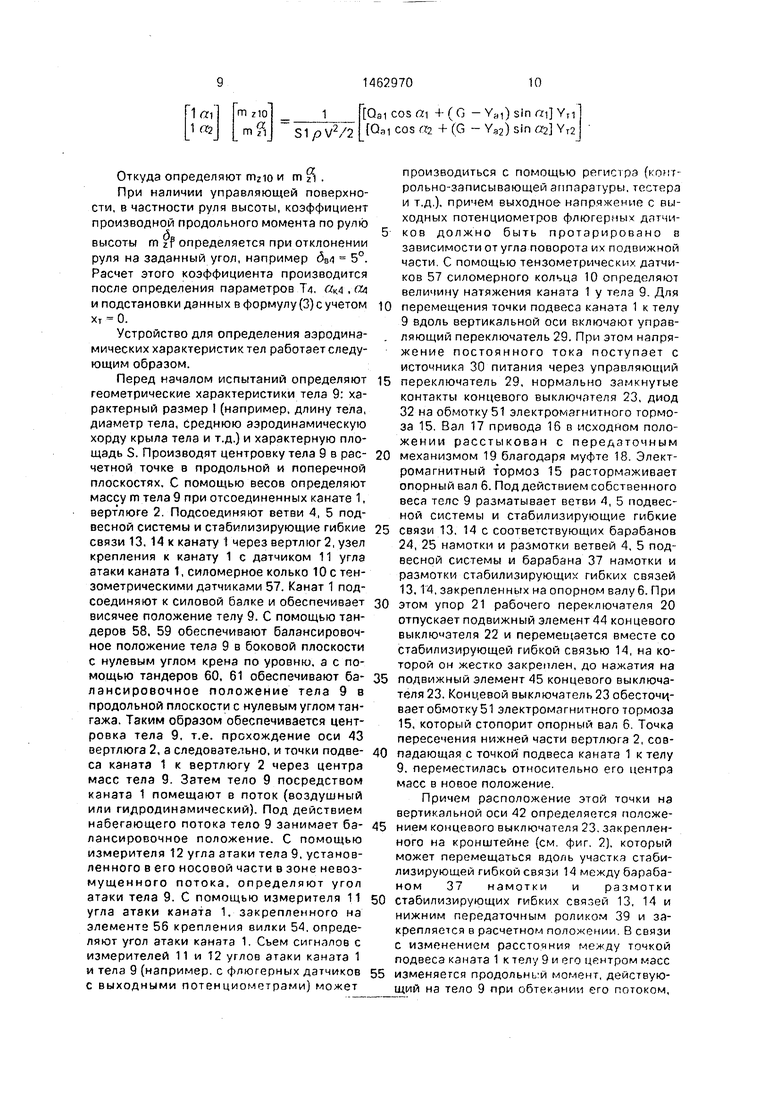
Плюсовой вывод 46 источника 30 питания связан с одними выводами 47, 48, управляющих переключателей 28, 29, другие выводы 49, 50 которых связаны через соответствующие нормально разомкнутые и нормально замкнутые контакты концевых включателей 22,23 с анодами диодов 31,32, катоды которых соединены через обмотку 51 электромагнитного тормоза 15с минусовым выводом 52 источника 30 питания, анод одного из диодов 31 соединен через обмотку 53 привода, 16 с минусовым выводом 52 источника 30 питания.
Узел 3 крепления вертлюга 2 к канату 1 выполнен в виде вилки 54, стержня 55 и элемента 56 крепления вилки 54 к измерителю 10 натяжения каната 1, при зтом измеритель 10 натяжения каната 1 размещен между канатом 1 и элементом 56 крепления вилки 54 к измерителю натяжения каната 1, измеритель 12 угла атаки тела закреплен в носовой части в зоне невозмущенного потока, а измеритель 11 угла атаки каната 1 закреплен на элементе 56 крепления вилки 54 к измерителю 10 натяжения каната 1.
Концы деталей 4. 5 подвесной системы и стабилизирующих гибких связей 13,14 заделаны в коуши и закреплены на нижней части вертлюга 2. Также на коуш заделан конец каната 1 к измерителю 10 натяжения каната 1.
Концы стабилизирующих гибких связей, выполненные из металлического каната, закреплены на барабане 37 намотки и размотки стабилизирующих гибких связей
13,14, который имеет две канавки для укладки соответствующей гибкой связи 13 или
14.При этом заделка каната на шарик в барабане 37 намотки и размотки стабилизирующих гибких связей 13, 14 может осуществляться по нормали авиационной техники.
Измеритель 10 натяжения каната 1 может быть выполнен в виде силомерного кольца круглой или эллиптической формы, снаружи и внутри которого размещены тен- 5 зометрические датчики 57, причем они расположены в середине кольца.
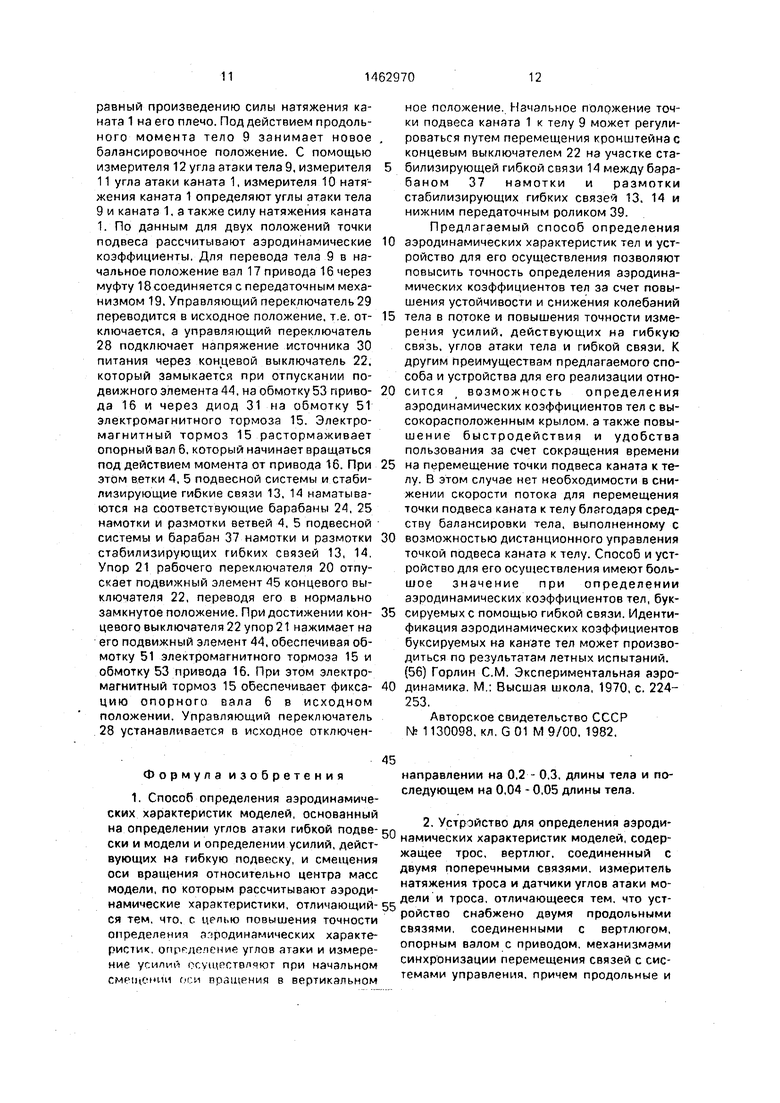
Размещение измерителя 10 натяжения каната 1 между вертлюгом 2 и канатом 1 выбрано стаким расчетом, чтобы измерять 10 величину силы натяжения каната 1 у тела 9 и исключить влияние аэродинамических и массовых характеристик каната 1 на точ ность измерения и натяжения. Как видно из фиг. 8, аэродинамические массовые харак- 15 теристики каната 1 равны О (точка а) в месте крепления каната 1 к вертлюгу 2 и равны АТк в произвольно выбранной точке каната (точка Ь), поэтому величины сил натяжения каната в точках а и b не равны Тк2 TKI. 20 Измеритель 12 угла атаки тела 9 закреплен в носовой части тела в зоне возмущенного потока, и сьем сигнала с указанного датчика можэт производиться, например с потенциометра с двумя средними точками, 25 к которому подается напряжение постоянного или переменного тока.
Конструкция измерителя 11 угла атаки каната 1 идентична конструкции измерителя 12 угла атаки тела 9.
30 Для балансировки тела 9 в исходном положении ветви 4, 5 подвесной системы и стабилизирующие гибкие связи 13,14 снабжены тандерами 58, 59, 60, 61, которые позволяют регулировать длину ветвей 4, 5 35 подвесной системы стабилизирующие связи 13, 14.
Измеритель 11 угла атаки каната 1, определяющий угловое положение вектора силы натяжения каната 1, размещен между 0 измерителем 10 натяжения каната 1, размещен между измерителем 10 натяжения каната 1 и вертлюгом 2, так как в этом месте размещен измеритель 10 натяжения каната
I,определяющий величину вектора силы на- 5 тяжения каната TKI. При этом такое размещение измерителя 11 угла атаки каната 1 исключает влияние изменения направления вектора силы натяжения каната по его длине за счет прогиба каната на точность изме0 рения угла атаки каната у тела (см. фиг, 8, ак2 ovi).
Передача сигналов с измерителей 10,
II,12 углов атаки каната 1 и тела 9 и силы натяжения каната 1 для регистрации, а так5 же их запитка постоянным илм переменным напряжением может осуществляться, например по кабель-тросу.
Для измерения угла атаки каната 1 и тела 9 при продувке последнего в аэродинамической трубе можно использовать, например, теодолит, В качестве привода можноиспользовать,например, электродвигатель постоянного тока.
Определение аэродинамических коэф- фициентов тела осуществляется следующим образом.
Перед началом испытаний определяют геометрические характеристики тела 9: характерную площадь S (например, площадь крыла) м характерный размер 1 (например, среднюю аэродинамическую хорду крыла Ьа), рассчитывают координаты центра масс тела относительно выбранных элементов конструкции тела (например, носа тела, строительной горизонтали и т.д.). Определяют массу m тела 9 при отсоединенных канате 11, вертлюге 2. Подсоединяют ветви 4, 5 подвесной системы и стабилизирующие гибкие связи 13,14 к канату через вертоюг 2 и производят центровку тела 9 с помощью тандеров58.59,60, 61 .-Центровка тела 9 как в продольной, так и поперечной плоскостях может осуществляться по уровню. Тело 9 подвешивают через канат 1, силомерное кольцо 10, вертлюг 2, ветви 4, 5 подвесной Системы и стабилизирующие связи 13, 14 и устанавливают фиксированную скорость потока V. Измерение скоростного напора рЧ 12 осуществляется с помощью измери- теля скоростного напора, размещенного в зоне невозмущенного потока. Под действием аэродинамических и массовых сил и мо- ментоа тело 9 занимает балансировочное положение. Измеряют силу натяжения ка- ната 1 у тела 9Ti, угол атаки тела 9 ai. Уменьшают скорость потока до нуля и смещают точку подвеса каната 1 к телу 9 вдоль вертикальной оси 8 пределах 1,3-2,4 характерного размера тела. Производят центровку тела в смещенной точке подвеса каната 1 к телу 9 с помощью тандероа 58, 59, 60, 61. Устанавливают заданную скорость потока и измеряют параметры Та, Оцз.. «2.
Весовые аэродинамические коэффици- енты определяют по следующей методике,
Вычисляют проекции Txi; Tyi силы натяжения каната Т; на оси ОХ и OY для двух вариантов эксперимента
Tx TlCOS СГкЬ
Ту - TiSln CZKi ,(1)
где 1 1, 2,... - номер эксперимента. С другой стороны
,
,(2)
где Qai - сила лобового сопротивления тела: 1а1 подъемная сила тела; g - ускорение силы тяжести. Из (2) определяют
Оа Тх1,
а1 mg - Tyi,
Составляют систему уравнений
Суо
f.a
Су
1
SpVV2
lai 1а2
откуда определяют Суо и Су .
ы
1с
1
(Ф SpVV2
откуда определяют Схои В, где В - коэффициент отвала померы.
При наличии управляющей поверхности, например руля высоты, проводят дополнительный эксперимент с отклоненным рулем высоты.
Дл этого уменьшают скорость потока до нуля и устанавливают угол отклонения руля высоты 5вз, отличный от нуля, например (Звз 5°, устанавливают заданную скорость потчка и измеряют параметры Тз, ОкЗ, OCQ,
Производную коэффициента подъемной силы тела по рулю высоты С у° в определяют по формуле
1 f
1аз
-СУО- С ОЗ).
Моментные аэродинамические коэффициенты определяют из уравнения равновесия моментов, действующих на тело в гфодольной плоскости, которое имеет вид
Мгю + М 1 а + М f (58 - Тх- у1 -Ь Ту1 XI - О,
где М f m zfS1pV /2 - производная продольного момента по рулю высоты;
шгР- коэффициент производной продольного момента по рулю высоты.
Учитывая, что в прямолинейном полете или при продувке в аэродинамической трубе угол наклона траектории 0 О, угол скольжения в продольной плоскости /9 О и
Тх| Txt cos а -Ь Ту| sin О);
Ту1 - Txi sin си 4- Tyj cos CQ :
;Tyj G-lal, после подстановки получим
Мгю + М « + М f дв - Qa COS а +
+ (G
Ya)sln + -Qasin OS+ (G-Ya)cos сБхт -О.(3)
при отсутствии управляющей поверхности dp О, а выбранной схемы подвески хт 0. Составляют систему уравнения
m zio
1 cos ai +(G-Yai) Sinai Yri
SI /)VV2 fQai cos «2 -f (G - Ya2) sin 2 Ут2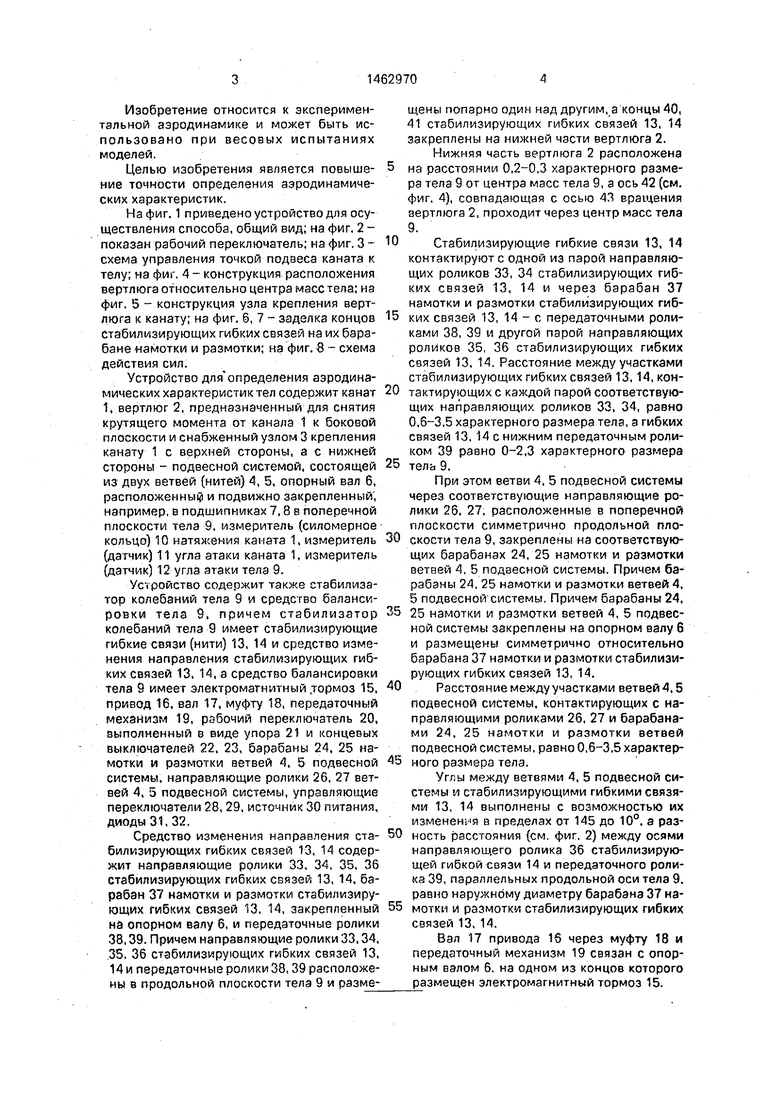

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения аэродинамических характеристик тел и устройство для его осуществления | 1986 |
|
SU1462969A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
| Способ определения аэродинамических коэффициентов моделей летательных аппаратов | 1982 |
|
SU1130098A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| Способ уборки полой гибкой системы и устройство для его реализации | 1987 |
|
SU1482365A1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |

Изобретение относится к зкспей ментальной аэродшамике и может быть использовано при исследован аэродинамических характ)истик мо- д«тей на гибкой подвеске Целью изобетения является повышение точности определения аэроди- маллшеских характе{ стик Для этого определения углов атаю1 и измерение усилий осуществляют при начальном смещении оси вращения в вертикальном налравлеж1и на 02 - 0.3 дганы тела и последующем на 0,04 - 0.05 длины тела Для этого же уа- ройство снабжено двумя продольными связями, соединенными с вертлюгом, опорным валом с приво- доч механизмами синхронизации перемещения связей с системами управления причем продольные и поперечные связи выполнены в виде гибких нитей, свободные концы которых через механизмы синхронизации перемещения соединены с опорным валом, так что ось вращения вертлюга совмещена с центром масс модели 2 спф-лы 8 ип
Откуда определяют mzio и m i .
При наличии управляющей поверхности, в частности руля высоты, коэффициент производной продольного момента по рулю
высоты m zf определяется при отклонении руля на заданный угол, например йв 5°. Расчет этого коэффициента производится после определения параметров T/i, «к4 , f- и подстановки данных в формулу (3) с учетом хт 0.
Устройство для определения аэродинамических характеристик тел работает следующим образом.
Перед началом испытаний определяют геометрические характеристики тела 9: характерный размер (например, длину тела, диаметр тела, среднюю аэродинамическую хорду крыла тела и т.д.) и характерную площадь S. Производят центровку тела 9 в рас- четной точке в продольной и поперечной плоскостях. С помощью весов определяют массу m тела 9 при отсоединенных канате 1, верт люге 2. Подсоединяют ветви 4, 5 подвесной системы и стабилизирующие гибкие связи 13, 14 к канату t через вертлюг 2, узел крепления к канату 1 с датчиком 11 угла атаки каната 1, силомерное колько Юстен- зометрическими датчиками 57. Канат 1 подсоединяют к силовой балке и обеспечивает висячее положение тепу 9. С помощью тан- деров 58, 59 обеспечивают балансировочное положение тела 9 в боковой плоскости с нулевым углом крена по уровню, а с помощью тендеров 60, 61 обеспечивают ба- лансировочное положение тела 9 в продольной плоскости с нулевым углом тангажа. Таким образом обеспечивается центровка тела 9, т.е. прохождение оси 43 вертлюга 2, а следовательно, и точки подве- са каната 1 к вертлюгу 2 через центра масс тела 9. Затем тело 9 посредством каната 1 помещают в поток (воздушный или гидродинамический). Под действием набегающего потока тело 9 занимает ба- лансировочное положение. С помощью измерителя 12 угла атаки тепа 9, установленного в его носовой части в зоне невозмущенного потока, определяют угол атаки тела 9. С помощью измерителя 11 угла атаки каната 1. закрепленного на элементе 56 крепления вилки 54. определяют угол атаки каната 1. Съем сигналов с измерителей 11 и 12 углов атаки каната 1 и тела 9 (например, с флюгерных датчиков с выходными потенциометрами) может
производиться с помощью регистра (контрольно-записывающей аппаратуры,тестера и т.д.), причем выходное напряжение с выходных потенциометров флюгерных датчиков должно быть протарировано в зависимости от угла поворота их подвижной части. С помощью тензометрических датчиков 57 силомерного кольца 10 определяют величину натяжения каната 1 у тела 9. Для перемещения точки подвеса каната 1 к телу 9 вдоль вертикальной оси включают управляющий переключатель 29. При этом напряжение постоянного тока поступает с источника 30 питания через управляющий переключатель 29, нормально замкнутые контакты концевого выключателя 23, диод 32 на обмотку 51 электромагнитного тормоза 15. Вал 17 привода 16 в исходном положении расстыкован с передаточным механизмом 19 благодаря муфте 18. Электромагнитный тормоз 15 растормаживает опорный вал 6. Под действием собственного веса теле 9 разматывает ветви 4, 5 подвесной системы и стабилизирующие гибкие связи 13. 14 с соответствующих барабанов 24, 25 намотки и размотки ветвей 4, 5 подвесной системы и барабана 37 намотки и размотки стабилизирующих гибких связей 13,14, закрепленных на опорном валу 6. При этом упор 21 рабочего переключателя 20 отпускает подвижный элемент 44 концевого выклю ателя 22 и перемеи1ается вместе со стабилизирующей гибкой связью 14, на которой он жестко закреплен, до нажатия на подвижный элемент 45 концевого выключателя 23. Концевой выключатель 23 обесточц- вает обмотку 51 электромагнитного тормоза 15, который стопорит опорный вал 6. Точка пересечения нижней части вертлюга 2, совпадающая с точкой подвеса каната 1 к телу 9. переместилась относительно его центра масс в новое положение.
Причем расположение этой точки на вертикальной оси 42 определяется положением концевого выключателя 23, закрепленного на кронштейне (см. фиг. 2). который может перемещаться вдоль участка стабилизирующей гибкой связи 14 между барабаном 37 намотки и размотки стабилизирующих гибких связей 13, 14 и нижним передаточным роликом 39 и закрепляется в расчетном положении. В связи с изменением расстояния между точкой подвеса каната 1 к телу 9 и его центром масс изменяется продольный момент, действующий на тело 9 при обтекании его потоком.
равный произведению силы натяжения каната 1 на его плечо. Под действием продольного момента тело 9 занимает новое балансировочное положение. С помощью измерителя 12 угла атаки тела 9,измерителя 11 угла атаки каната 1, измерителя 10 натяжения каната 1 определяют углы атаки тела 9 и каната 1, а также силу натяжения каната 1. По данным для двух положений точки подвеса рассчитывают аэродинамические коэффициенты. Для перевода тела 9 в начальное положение вал 17 привода 16 через муфту 18соединяется с передаточным механизмом 19. Управляющий переключатель 29 переводится в исходное положение, т.е. отключается, а управляющий переключатель 28 подключает напряжение источника 30 питания через кон цевой выключатель 22. который замыкается при отпускании подвижного элемента 44. на обмотку 53 привода 16 и через диод 31 на обмотку 51 электромагнитного тормоза 15. Электромагнитный тормоз 15 растормаживает опорный вал 6, который начинает вращаться под действием момента от привода 16. При этом ветки 4. 5 подвесной системы и стабилизирующие гибкие связи 13, 14 наматываются на соответствующие барабаны 24, 25 намотки и размотки ветвей 4, 5 подвесной системы и барабан 37 намотки и размотки стабилизирующих гибких связей 13, 14. Упор 21 рабочего переключателя 20 отпускает подвижный элемент 45 концевого выключателя 22, переводя его в нормально замкнутое положение. При достижении концевого выключателя 22 упор 21 нажимает на его подвижный элемент 44, обеспечивая обмотку 51 электромагнитного тормоза 15 и обмотку 53 привода 16. При этом электромагнитный тормоз 15 обеспечивает фиксацию опорного вала 6 в исходном положении. Управляющий переключатель 28 устанавливается в исходное отключенФормула изобретения
ное положение. Начальное положение точки подвеса каната 1 к телу 9 может регулироваться путем перемещения кронщтейна с концевым выключателем 22 на участке стабилизирующей гибкой связи 14 между барабаном 37 намотки и размотки стабилизирующих гибких связей 13, 14 и нижним передаточным роликом 39.
Предлагаемый способ определения
аэродинамических характеристик тел и устройство для его осуществления позволяют повысить точность определения аэродинамических коэффициентов тел за счет повышения устойчивости и снижения колебаний
тела в потоке и повышения точности измерения усилий, действующих на гибкую связь, углов атаки тела и гибкой связи. К другим преимуществам предлагаемого способа и устройства для его реализации относится возможность определения аэродинамических коэффициентов тел с высокорасположенным крылом, а также повышение быстродействия и удобства пользования за счет сокращения времени
на перемещение точки подвеса каната к телу. В этом случае нет необходимости в снижении скорости потока для перемещения точки подвеса каната к телу благодаря средству балансировки тела, выполненному с
возможностью дистанционного управления точкой подвеса каната к телу. Способ и устройство для его осуществления имеют большое значение при определении аэродинамических коэффициентов тел, буксируемых с помощью гибкой связи. Идентификация аэродинамических коэффициентов буксируемых на канате тел может производиться по результатам летных испытаний. (56) Горлин С.М. Экспериментальная аэродинамика. М.; Высшая школа, 1970, с. 224- 253.
Авторское свидетельство СССР N 1130098, кл. G 01 М 9/00, 1982,
направлении на 0,2 - 0,3, длины тела и последующем на 0,04 - 0,05 длины тепа.
55
.поперечные связи выполнены в виде гиб- соединены t опорным валом так, чго ось ких нитей, свободные концы которых через вращения вертлюга совмещена с центром механизмы синхронизации перемещения ; масс модели.
.1
п
Фаг.1
35
38
Фиг, 2
in 28 4fff
21
-о о
Ь
6
:
II
-V
5г30
.
.5
1462970
55J
Г
4J
J7
Ф1/г.б
А-А
Фиг,7
фш.8
