Изобретение относится к управлению машинами для бетонирования каналов и может быть использовано на строительных и других агрегатах, гдеходовые тележки должны синхронно, параллельно передвигаться на прямых участках пути следования и особенно на поворотах в автоматическом режиме управления.
Цель изобретения - повышение производительности работ путем обеспечения автоматического синхронного передвижения ходовых тележек машин на прямых участках пути следования, а также на поворотах, с исключением случаев повреждения фермы и рабочих органов,
На фиг. 1 показана одна из машин комплекса для бетонирования каналов (бетоноукладчик), вид в плане; на фиг о 2 - установка устройства на верхней ходовой тележке, узел I на Фиг01; на фиг. 3 - рабочая зона воздействия управляющего элемента на срабатывание торцового переключателя; на фиг с 4 - блок-схема синхронного автоматического передвижения машины вдоль оси каналао
Комплекс машин для бетонирования каналов состоит из экскаватора-профилировщика, бетоноукладчика и нарезчика швов. Каждая из машин состоит из одинаковых основных узлов, задействованных в системе автоматизации синхронного движения тележек.
Бетоноукладчик (фиг.1) представляет собой самоходную машину непрерывного действия, состоящую из нижней ходовой тележки 1, площадки 2 обслуживания, фермы 3, верхней ходовой тележки 4.
Ферма 3 в верхней своей части жестко соединена с поворотной балкой 5 и цилиндром 6 о Цилиндр 6 шарнирно соединен с опорной трубой 7, опирающейся и соединенной с верхней тележкой 4. Таким образом ферма 3 имеет возможность горизонтального поворота относительно верхней тележки 4„ На верхней ходовой тележке устанавливают устройство для автоматического синхронного передвижения тележек (фиг.2). К опорной трубе 7 прикрепляют управляющий элемент 8 (фиг.2) Для получения точного целевого сигнала торцовые переключатели 9,10 устанавливают на кронштейне дуговой формы 11, жестко соединенной с цилиндром 6, который перемещается в горизонтальной плоскости относительно трубы 7.
R торцовых бесконтактных переключателях 9,10 рабочая поверхность чувствительных элементов 12, 13 в процессе работы перемещается по дуге 14, поэтому в управляющем элементе 8
Q рабочая поверхность 15 выполнена в виде сферы с перемещением по дуге 16. Этим постоянно обеспечивается расстояние между чувствительными элементами 12, 13 торцовых переключателей
5 9, 10 и рабочей поверхностью 15 управляющего элемента 8, равное зоне чувствительности (4-10 мм).
Торцовые бесконтактные переключатели 9, 10 работают по принципу
0 управляемого генератора, коммутация происходит при приближении к чувствительным элементам 12, 13 рабочей поверхности 15 управляющего элемента 8„
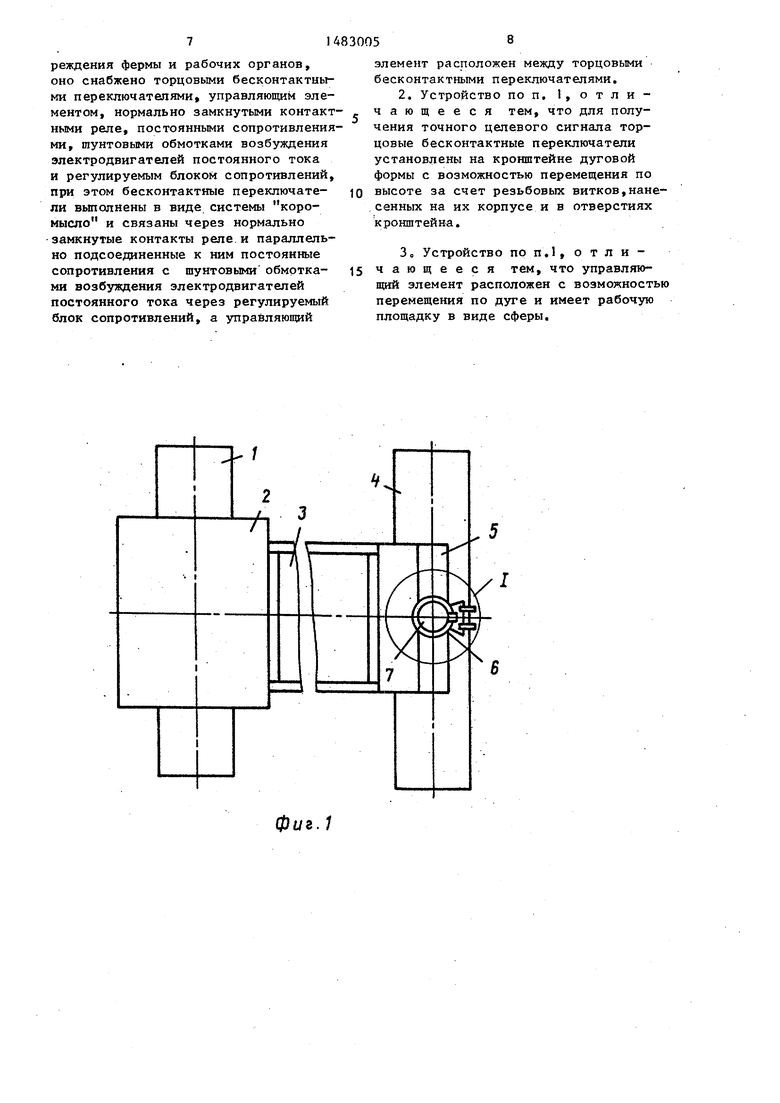
5 Рабочая зона воздействия управляющего элемента 8 показана на диаграмме (фиг.З) в зависимости от создаваемого зазора и перекрытия поверхности чувствительных элементов
0 12, 13, а также показана работа переключателей на включение - дуга 17, отключение - дуга 18.
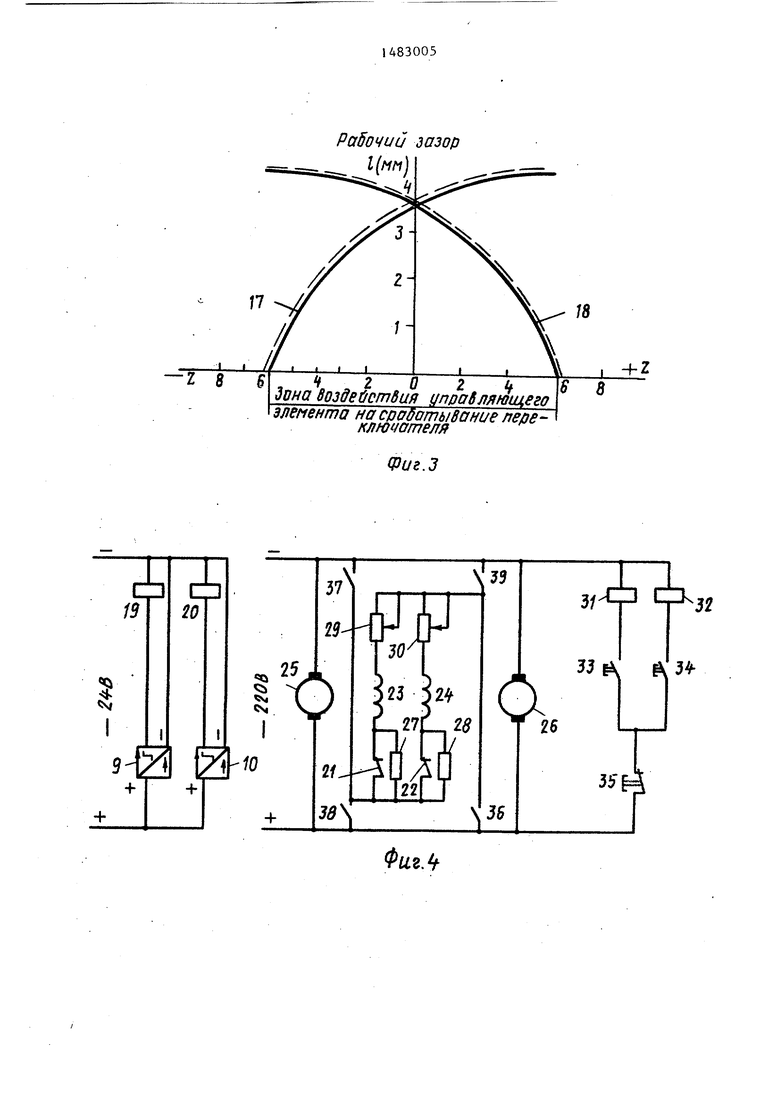
Выходной рабочий сигнал бесконтактных торцовых переключателей
5 9,10 обеспечивает нормальную работу „ используемых в качестве нагрузки электромагнитных реле 19,20 или логических элементов (фиг.4)0 Электромагнитные реле 19,20 своими нормаль0 но замкнутыми контактами 21,22 воздействуют на шунтовые обмотки 23,24 возбуждения электродвигателей 25,26 постоянного тока приводов ходовых тележек, автоматически переключая
5 питание гаунтовых обмоток 23, 24 возбуждения через постоянные сопротивления 27,28, создавая минимальную скорость движения одной из тележек0 Изменение скорости вращения
0 электродвигателей 25, 26 привода ходовых тележек и соответственно всей машины осуществляют реостатами 29,30 Реверс передвижения машины осуществляют магнитными пускателями 31,32,
включаемыми кнопочными элементами 33, 34, 35 и воздействующими своими контактами 36 - 39 на шунтовую обмотку возбуждения электродвигателей 25, 26.
514
Устройство для автомагического управления машинами работает следующим образом.
На прямых участках пути следования машин вдоль оси канала нижняя
ходовая тележка 1 и верхняя ходовая тележка 4 передвигаются параллельно и синхронно друг другуо В этом случае управляющий элемент 8 расположен между торцовыми бесконтактными переключателями 9,10 (фиг.2)о
На прямых участках пути следования машин и особенно на поворотах пооисходит забегание тележек за счет пробуксовки колес и неодинаковой скорости вращения электродвигателей
При забегании верхней ходовой тележки 4 цилиндр 6 с поворотной балкой 5 и фермой 3 повернется против часовой стрелки в опорной трубе 7. Тогда управляющий элемент 8 своей рабочей поверхностью 15 перекроет чувствительный элемент 12 торцового бесконтактного переключателя 1Q (фиг04) и его выходной рабочий сигнал даст команду на включение электромагнитного реле 20, которое разорвет свои нормально замкнутые контакты 21 в цепи питания гаунтовой обмот- ки 23 возбуждения, В этом случае автоматически переводится питание шун товой обмотки 23 возбуждения через сопротивление 27, создавая минимальную скорость вращения электродвига- телю 25 и соответственно ходовой тележке 4. Нижняя тележка 1, идя с постоянной скоростью, догоняет верхнюю тележку 4, происходит выравнивание обеих тележек Цилиндр 6 с поворот- ной балкой 5, фермой 3 повернется по часовой стрелке в опорной трубе 7„ Тогда управляющий элемент 8 своей рабочей поверхностью 15 освободит чувствительный элемент 12 торцового бесконтактного переключателя 10 и его выходной рабочий сигнал отключает электромагнитное реле 20, которое включает свои нормально замкнутые контакты 21 в цепи питания шунтовой обмотки 23 возбуждения. В этом случае автоматически отключается сопротивление 27, которое последовательно включено к шунтовой обмотке 23 возбуждения. Скорость вращения электро- двигателя 25 увеличивается и становится равной электродвигателю 26,
Обе тележки нижняя и верхняя начинают двигаться синхронно с одина
6
ковой скоростью. При забегании нижне ходовой тележки 1 цилиндр 6 с поворотной балкой 51 фермой 3 повернется по часовой стрелке в опорной трубе 7. Тогда управляющий элемент 8 своей рабочей поверхностью 15 перекроет чувствительный элемент торцевого бесконтактного переключателя 9 (йиг.4) и его выходной рабочий сигнал даст команду на включение электромагнитного реле 19, которое разомкнет свои нормально замкнутые контакт 22 в цепи питания иунтовой обмотки 24 возбуждения. R этом случае автоматически переводится питание шунтовой обмотки 24 возбуждения через сопротивление 28, создавая минимальную скорость нижней ходовой тележки 1. Верхняя ходовая тележка 4, идя с постоянной скоростью, догоняет нижнюю теложку i, происходит выравнивание обеих тележек.
Цилиндр 6 с поворотной балкой 5, фермой 3 повернется против часовой стрелки в опорной трубе 70 Тогда управляющий элемент 3 своей рабочей поверхностью 15 освободит чувствительный элемент торцового бесконтактного переключателя 9 и его выходной рабочий сигнал отключает электромагнитное реле 19, которое включает свои нормально замкнутые контакты 22 в цепи питания шунтовой обмотки 24„ Б этом случае автоматически отключается сопротивление 28,которое последовательно включено к шунтовой обмотке 24 возбуждения Электродвигатель 26 набирает скорость и она становится равной электродвигателю 25. Обе тележки нижняя и верхняя начинают двигаться синхронно с одинаковой скоростью.
Формула изобретения
о Устройство для автоматического управления машинами по бетонированию каналов, состоящее из верхней и нижней опорных тепежек с электроприводом и фермой, причем верхняя тележка соединена с фермой гаарнирно, отличающееся тем, что, с целью повышения производительности работ путем обеспечения автоматического синхронного передвижения ходовых тележек машин на прямых участках пути следования, а также на поворотах, с исключением случаев повреждения фермы и рабочих органов, оно снабжено торцовыми бесконтактными переключателями управляющим элементом, нормально замкнутыми контакт- ными реле, постоянными сопротивлениями, шунтовыми обмотками возбуждения электродвигателей постоянного тока и регулируемым блоком сопротивлений, при этом бесконтактные переключате- ли выполнены в виде системы коромысло и связаны через нормально замкнутые контакты реле и параллельно подсоединенные к ним постоянные сопротивления с шунтовыми обмотка- ми возбуждения электродвигателей постоянного тока через регулируемый блок сопротивлений, а управляющий
элемент расположен между торцовыми бесконтактными переключателями.
2. Устройство по п. отличающееся тем, что для получения точного целевого сигнала торцовые бесконтактные переключатели установлены на кронштейне дуговой формы с возможностью перемещения по высоте за счет резьбовых витков,нанесенных на их корпусе и в отверстиях кронштейна.
Зс Устройство по п. отличающееся тем, что управляющий элемент расположен с возможность перемещения по дуге и имеет рабочую площадку в виде сферы.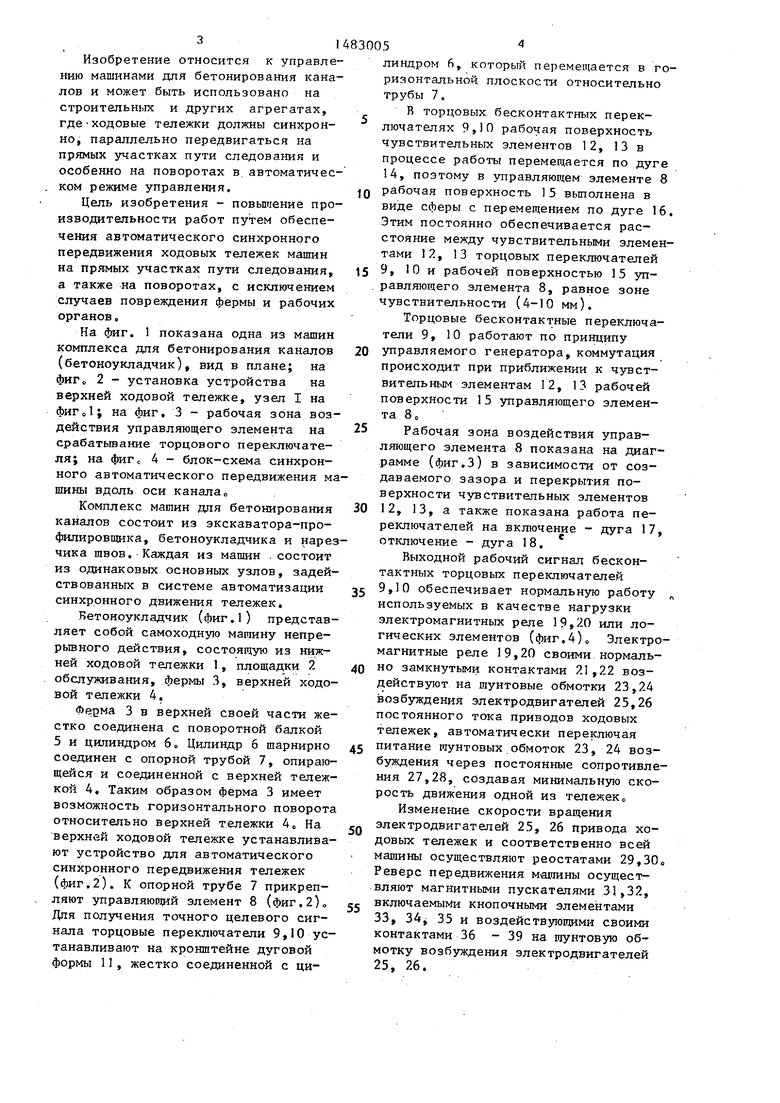
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗДЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ МОСТОВОГО КРАНА | 2012 |
|
RU2497697C1 |
| Система управления концевыми тележками многоопорной дождевальной машины | 1982 |
|
SU1130274A1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2404569C2 |
| Устройство для автоматического управления копировально-фрезерным станком | 1941 |
|
SU61944A1 |
| АГРОМОСТ ДЛЯ ОБРАБОТКИ АГРОУГОДИЙ | 2003 |
|
RU2238620C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| Устройство для поддержания постоянства скорости двигателей постоянного тока | 1936 |
|
SU54927A1 |
| ПРОФИЛИРОВЩИК КАНАЛОВ | 1973 |
|
SU408984A1 |
Изобретение относится к управлению землеройными и бетоноукладочными мащинами. Цель изобретения - повышение производительности работ путем обеспечения автоматического синхронного передвижения ходовых тележек машин на прямых участках пути следования, а также на поворотах, с исключением случаев повреждения фермы и рабочих органов. Устройство для автоматического управления машинами по бетонированию каналов снабжено бесконтактными переключателями, воздействующими на шунтовую обмотку возбуждения электродвигателей постоянного тока. При забегании верхней ходовой тележки самоходной машины цилиндр 6 с поворотной балкой и фермой повернется против часовой стрелки в опорной трубе 7. Управляющий элемент 8 своей рабочей поверхностью 15 перекроет чувствительный элемент 12 торцового бесконтактного переключателя 10 и его выходной рабочий сигнал даст команду на включение электромагнитного реле, которое разорвет свои нормально замкнутые контакты в цепи питания шунтовой обмотки возбуждения. Автоматически переводится питание шунтовой обмотки возбуждения через сопротивление, этим создавая минимальную скорость вращения электродвигателю и соответственно ходовой тележке. Нижняя тележка, идя с постоянной скоростью, догоняет верхнюю и происходит выравнивание обеих тележек. 2 з.п. ф-лы, 4 ил.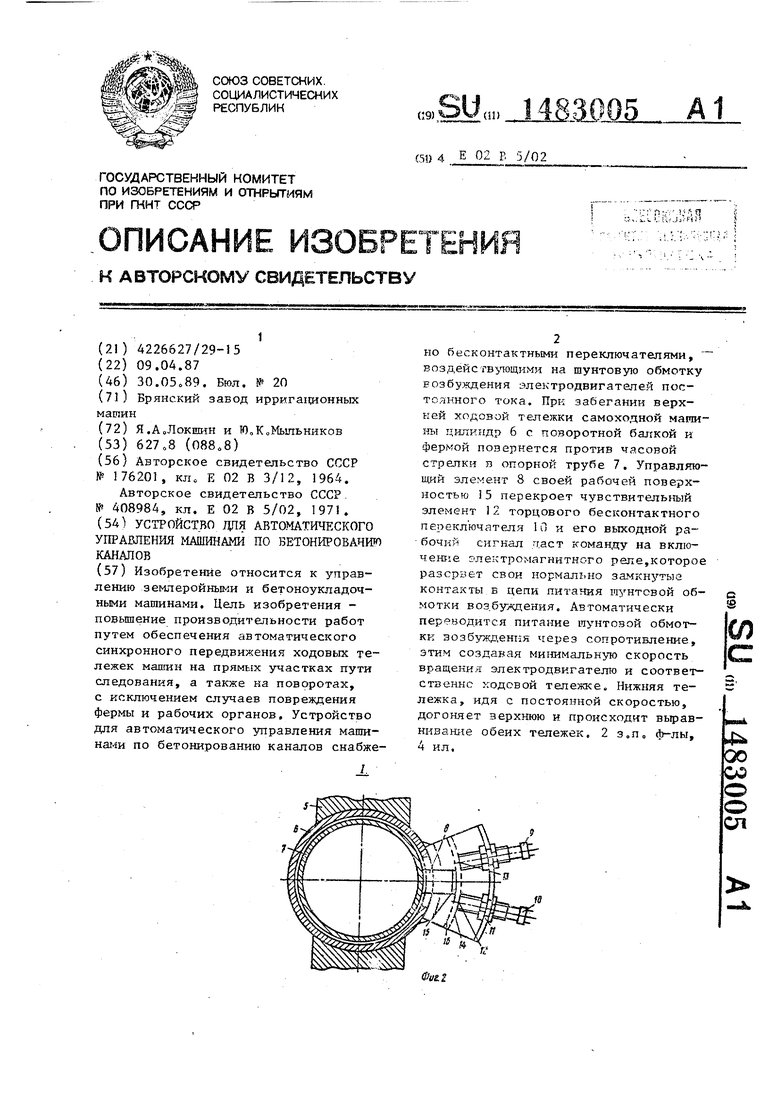
фиг. 1
Рабочий зазор Цмн)
I 8
if 2 0 2 Зона Воздействий управляющего
элемента на срабатывание переключателя
Фиг.З
| САМОХОДНАЯ МАШИНА ДЛЯ БЕТОНИРОВАНИЯ ДНА И ОТКОСОВ КАНАЛОВ | 0 |
|
SU176201A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Микрофонно-телефонно-катодный усилитель | 1923 |
|
SU408A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
