Изобретение относится к подвижным зажимным устройствам и может быть использовано в качестве схвата роботов-манипуляторов, обрабатывающих центров и транспортирующих систем и может найти применение в автоматических линиях и различном технологическом автоматизированном оборудовании в машиностроении.
Известно многозвенное подвижное зажимное устройство, выполненное в виде установленных в одной плоскости двух коромысловых рычажных механизмов, сблокированных с двумя параллелограммными рычажными механизмами с двухдвигательным приводом (статья Кобзарь Д.М., Гольдшмидт М.Г. "Пути сокращения вспомогательного времени при утилизации покрышек фрезерованием" // Материалы V Межд. конф. «Проблемы механики современных машин»: Улан-Удэ, Изд-во ВСГТУ, 2012. Том 1, стр. 70, рис. 3 со схемой зажимного устройства) - аналог.
Недостатками известного зажимного устройства являются:
1. Сложность конструкции и сборки между собой механизмов разного типа.
2. Невозможность наружного зажима изделий любой формы.
3. Низкая жесткость и точность позиционирования из-за зажима крупного объекта только в двух точках по его окружности приводит к его выскальзыванию из зоны зажима.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирное зажимное устройство, содержащее зажимные элементы и привод их перемещения, выполненный в виде многозвенного рычажного механизма с установленными в нем под разными пространственными углами между собой вращательными кинематическими парами и пересекающимися между собой в пространстве подвижными рычагами с установленными на них длинными упругими стрежнями для зажима детали только в двух противоположных точках (Шарнирное зажимное устройство для манипулятора по RU 193126.U1, B25J 15/08, 15.10/2019) -прототип.
Недостатками указанного шарнирного зажимного устройства являются:
1. Установка кинематический пар и рычагов под разными пространственными углами усложняет конструкцию, ее изготовление и сборку.
2. Низкая надежность двухточечного зажима деталей круглой формы.
3. Возникающий при зажиме консольной изгиб зажимных стержней приводит к угловому перекосу, зажимаемой детали, что нарушает ее требуемое ориентирование в рабочем пространстве манипулятора.
4. Низкая жесткость зажима изделий, и следовательно, низкая точность их позиционирования под нагрузкой из-за применения упругих зажимных рычагов, что снижает точность выполнения технологических операций манипулятором.
5. Ограниченная область применения в качестве схвата манипуляторов для автоматических линий, обрабатывающих переналаживаемых приводов и подвесных транспортирующих устройств - из-за отсутствия возможности дистанционного управления зажимом и освобождением изделия.
В основу изобретения положена техническая задача, заключающаяся в обеспечении гарантированного зажима изделий различной формы (круглой, овальной, плоской) как снаружи, так и внутри их полой поверхности, а также повышения жесткости рычажного зажимного механизма и за счет этого повышения точности позиционирования зажимаемого объекта (изделия или инструмента на выходном звене манипулятора) для расширения областей и эффективности его применения в технике в сочетании с простотой его конструкции, технологичности изготовления, сборки и управления с применением только одного приводного двигателя.
Получение технического результата достигается за счет того, что шарнирное зажимное устройство содержит многозвенный рычажный механизм, выполненный в виде двух шарнирных четырехзвенных опорного и зажимного ромбов, установленных между собой с параллельным расположением соответствующих звеньев и соединенных между собой посредством соединительных двухшарнирных рычагов одинаковой длины с параллельно отогнутыми между собой обоими концами и двойных цилиндрических шарниров с параллельными осями вращения.
Одно из звеньев шарнирного опорного ромба выполнено с возможностью закрепления на выходном звене манипулятора, другое смежное с ним звено опорного ромба соединено с приводным двигателем, а зажимные элементы выполнены в виде поворотных зажимных роликов.
Все многозвенное подвижное зажимное устройство выполнено с возможностью подвешивания на выходном звене манипулятора через шарнирный подвес, соединенный с двумя противоположными вершинами его ромбовидной кинематической цепи установлен подвижный привод в виде цилиндра с расположенным в нем поршнем со штоком для изменения длины диагоналей шарнирного опорного ромба в процессе дистанционного управления манипулятором.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7.
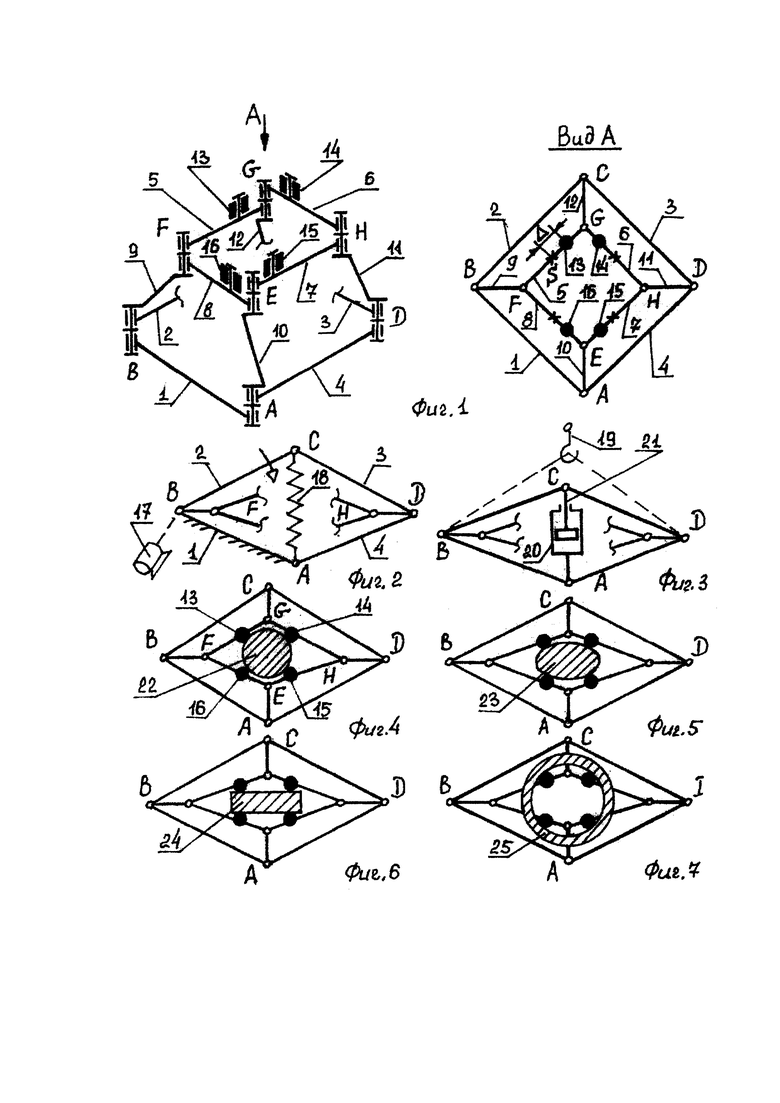
На фиг. 1 изображено шарнирное зажимное в исходном положении (общий вид и Вид А на фиг. 1), содержащий многозвенное рычажное зажимное устройство, выполненное в виде двух шарнирных четырехзвенных опорного ромба ABCD (образованного двухшарнирными звеньями 1, 2, 3 и 4 одинаковой длины, т.е. АВ=ВС=CD=DA) и зажимного ромба FGHE (образованного двухшарнирными звеньями 5, 6, 7 и 8 одинаковый длины, т.е. FG=GH=HE=EF).
Шарнирный зажимной ромб FGHE и шарнирный опорный ромб ABCD установлены симметрично между собой (Вид А) и соединены между собой посредством расположенных по их диагоналям АС и BD четырех соединительных двухшарнирных рычагов 9, 10, 11 и 12 одинаковой длины с параллельно отогнутыми между собой обоими концами (т.е. BF=АЕ=DH=CG) и восьми двойных цилиндрических шарниров с параллельными осями вращения (расположенных на всех восьми вершинах А, В, С, D, Е, F, G, Н обоих ромбов ABCD и FGHE) для образования двенадцатизвенной замкнутой кинематической цепи на основе только двухшарнирных звеньев. Все звенья шарнирного зажимного ромба EFGH могут быть выполнены меньшей длины или равной длины по сравнению с длиной звеньев шарнирного опорного ромба ABCD и снабжены расположенными с четырех сторон зажимного ромба EFGH поворотными зажимными роликами 13, 14, 15 и 16, установленными на каждом из звеньев 5, 6, 7 и 8 зажимного ромба EFGH с одинаковым смещением А относительно середины S длины каждого звена 5, 6, 7 и 8 (FS=SG=FG/2).
Одно из звеньев (например, №1) шарнирного опорного ромба ABCD может быть закреплено на выходном звене манипулятора, другое смежное с ним звено опорного ромба ABCD (например, №2) соединено с приводным двигателем 17, а между двумя противоположными вершинами А и С опорного ромба ABCD установлен упругий элемент 18, выполненный, например, в виде винтовой пружины.
Все многозвенное подвижное зажимное устройство может быть подвешено на выходном звене манипулятора через шарнирный подвес 19, соединенный с двумя противоположными вершинами B и D шарнирного опорного ромба ABCD, а между двумя другими противоположными вершинами А и С его ромбовидной кинематической цепи установлен привод в виде подвижного цилиндра 20 с расположенным в нем поршнем со штоком 21 для изменения длины диагоналей АС и BD шарнирного опорного ромба ABCD.
На фиг. 2 представлен вариант привода зажимного устройства от приводного двигателя 17 для поворота в опорном ромбе ABCD звена 1 относительно зафиксированного звена 2.
На фиг. 3 представлен вариант привода зажимного устройства в виде, например, гидроцилиндра 20 с расположенным в нем поршнем со штоком 21.
На фиг. 4 представлено зажимное устройство в положении зажима снаружи изделия круглой формы 22.
На фиг. 5 представлено зажимное устройство в положении зажима снаружи изделия овальной формы 23.
На фиг. 6 представлено зажимное устройство в положении зажима снаружи изделия плоской формы 24.
На фиг. 7 представлено зажимное устройство в положении зажима изнутри полого изделия с круглой формой отверстия 25.
Работа представленного зажимного устройства заключается в следующем.
В исходном положении (без зажима изделия, что показано на фиг. 1 (Вид А)) диагонали АС и BD опорного ромба ABCD равны между собой, и соответственно через соединительные рычаги 9, 10, 11 и 12 диагонали EG и FH зажимного ромба FGHE тоже будут равны между собой, что вызовет удаление от центра ромба FGHE всех четырех зажимных поворотных роликов 13, 14, 15 и 16, и образование в ромбе рабочей зоны для зажима снаружи или внутри требуемого изделия (в виде детали или инструмента).
Затем после установки зажимаемого изделия различной формы в рабочую зону (внутри или снаружи зажимных поворотных роликов 13, 14, 15 и 16 при повороте вала двигателя 17 (по часовой стрелке на фиг. 2) или при подаче жидкости в штоковую полость гидроцилиндра 20 (на фиг. 3) происходит одновременное уменьшение диагонали EG и зажимного ромба FGHE и соответственное увеличение диагонали FH этого ромба, что приводит к сближению поворотных зажимных роликов 13, 14,15 и 16 между собой до контакта и надежного четырехстороннего зажима изделия различной формы (как это показано на фиг. 4, фиг. 5, фиг. 6 и фиг. 7)). При отказе одного из приводов установленная внутри ромбы упругая пружина 17 обеспечивает гарантированный зажим изделия. Задавая в приводе 17 или 20 движение в противоположном направлении происходит выравнивание диагоналей в обоих ромбах (АС=BD, EG - FH), возврат в исходное положение (Вид А на фиг. 1) и освобождение зажатого изделия.
Достигаемый в предлагаемом шарнирном зажимном устройстве положительный эффект заключается в следующем:
1. Упрощение конструкции шарнирного зажимного устройства за счет выполнения всех звеньев этого зажимного устройства предельно простыми в виде двухшарнирных рычагов одинаковой длины и легко собираемыми на вращательных кинематических парах с параллельными осями их поворота.
2. Обеспечение надежного четырехстороннего зажима как снаружи, так и внутри объемных и плоских изделий различной формы за счет переменной геометрии зажимного ромба, что обеспечивает одновременное сближение всех четырех зажимных роликов к центру зажимного ромба до их полного контакта с поверхностью зажимаемого изделия во всех четырех точках.
3. Достижение большой жесткости в осевом направлении нагружения зажатого инструмента или детали, что повышает точность позиционирования и обработки и расширяет области применения манипуляторов с таким схватом.
4. Возможность шарнирного подвешивания зажимного устройства на выходном звене манипулятора и дистанционного управления им посредством гидро- или пневмопривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| ПОДВИЖНАЯ МЕХАНИЧЕСКАЯ СИСТЕМА СЕЙСМОЗАЩИТЫ ЗДАНИЯ | 2020 |
|
RU2742677C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ | 2019 |
|
RU2737249C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| ШАРНИРНЫЙ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728850C1 |
Изобретение относится к области зажимных устройств и может быть использовано в качестве схвата роботов-манипуляторов или транспортирующих систем. Устройство содержит зажимные элементы и привод их перемещения, которые кинематически связаны между собой посредством многозвенного рычажного механизма, который выполнен в виде соединенных между собой через двойные цилиндрические шарниры четырехзвенного опорного ромба и четырехзвенного зажимного ромба, звенья которого расположены параллельно соответствующим звеньям опорного ромба, при этом шарниры опорного ромба связаны с соответствующими шарнирами зажимного ромба посредством соединительных рычагов, расположенных по диагоналям опорного ромба. Зажимные элементы выполнены в виде поворотных зажимных роликов, установленных на каждом из звеньев зажимного ромба с одинаковым смещением относительно середины каждого звена. Использование изобретения позволяет повысить надежность зажима, точность позиционирования изделий и расширить технологические возможности устройства. 2 з.п. ф-лы, 7 ил.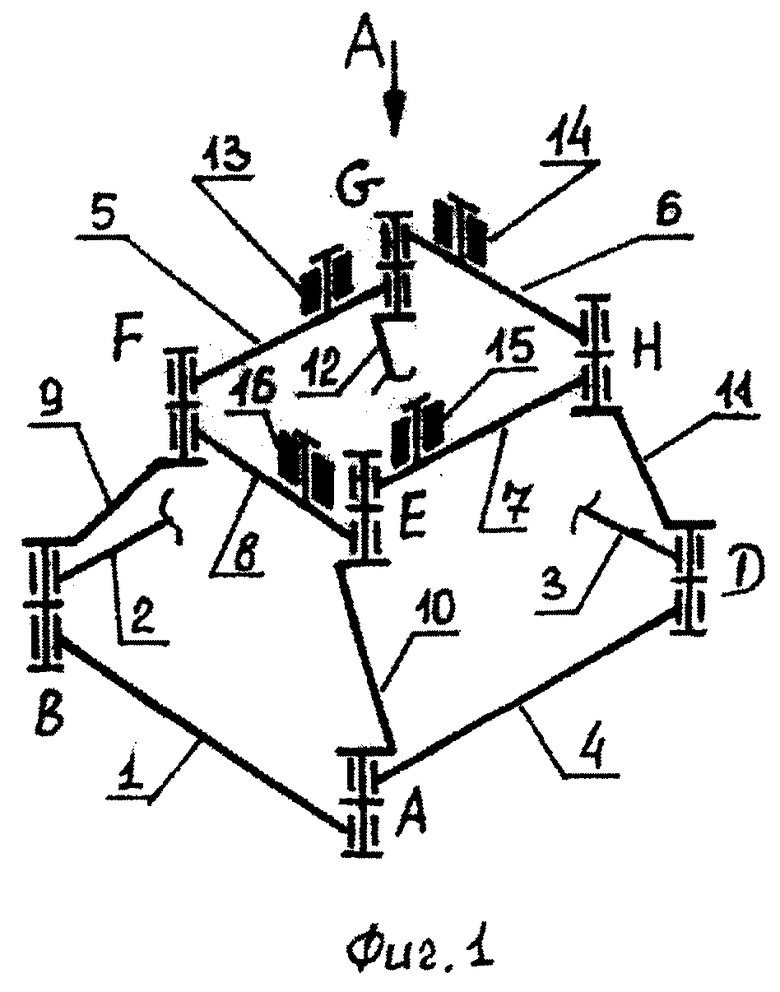
1. Шарнирное зажимное устройство, содержащее зажимные элементы и привод их перемещения, которые кинематически связаны между собой посредством многозвенного рычажного механизма с вращательными кинематическими парами, отличающееся тем, что упомянутый рычажный механизм выполнен в виде соединенных между собой через двойные цилиндрические шарниры шарнирного четырехзвенного опорного ромба и шарнирного четырехзвенного зажимного ромба, звенья которого имеют длины меньше, чем длина звеньев опорного ромба и расположены параллельно соответствующим звеньям опорного ромба, причем шарниры опорного ромба связаны с соответствующими шарнирами зажимного ромба посредством соединительных рычагов одинаковой длины, расположенных по диагоналям опорного ромба и имеющих отогнутые оба конца, расположенные параллельно между собой для соединения с соответствующим шарниром, при этом зажимные элементы выполнены в виде поворотных зажимных роликов, установленных на каждом из звеньев зажимного ромба с одинаковым смещением относительно середины каждого звена, а оси вращения всех упомянутых шарниров расположены параллельно друг другу.
2. Устройство по п. 1, отличающееся тем, что привод перемещения зажимных элементов выполнен в виде приводного двигателя, соединенного с одним из звеньев опорного ромба с возможностью его поворота относительно смежного с ним звена, выполненного с возможностью закрепления, например, на выходном звене манипулятора, при этом между двумя противоположно расположенными шарнирами опорного ромба установлен упругий элемент, например, винтовая пружина.
3. Устройство по п. 1, отличающееся тем, что привод перемещения зажимных элементов выполнен в виде силового цилиндра, корпус которого соединен с одним из шарниров опорного ромба, а его шток соединен с противоположно расположенным шарниром опорного ромба с возможностью изменения длины диагоналей опорного ромба, при этом опорный ромб выполнен с возможностью подвешивания на выходном звене манипулятора через шарнирный подвес, соединенный с двумя другими противоположно расположенными шарнирами опорного ромба.
| 0 |
|
SU193126A1 | |
| 0 |
|
SU163682A1 | |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1419878A1 |
| CN 104385290 A, 04.03.2015 | |||
| CN 203738810 U, 30.07.2014. | |||

