Изобретение относится к контрольно-измерительной технике, а именно к способам измерения крупногабаритных деталей авиационной техники, контуры которых заданы преимущественно кривыми второго порядка.
Цель изобретения - снижение трудоемкости и повышение точности измерения криволинейных поверхностей за счет сохранения положения одной из опорных точек и измерения положения трех точек на каждом шаге измерения.
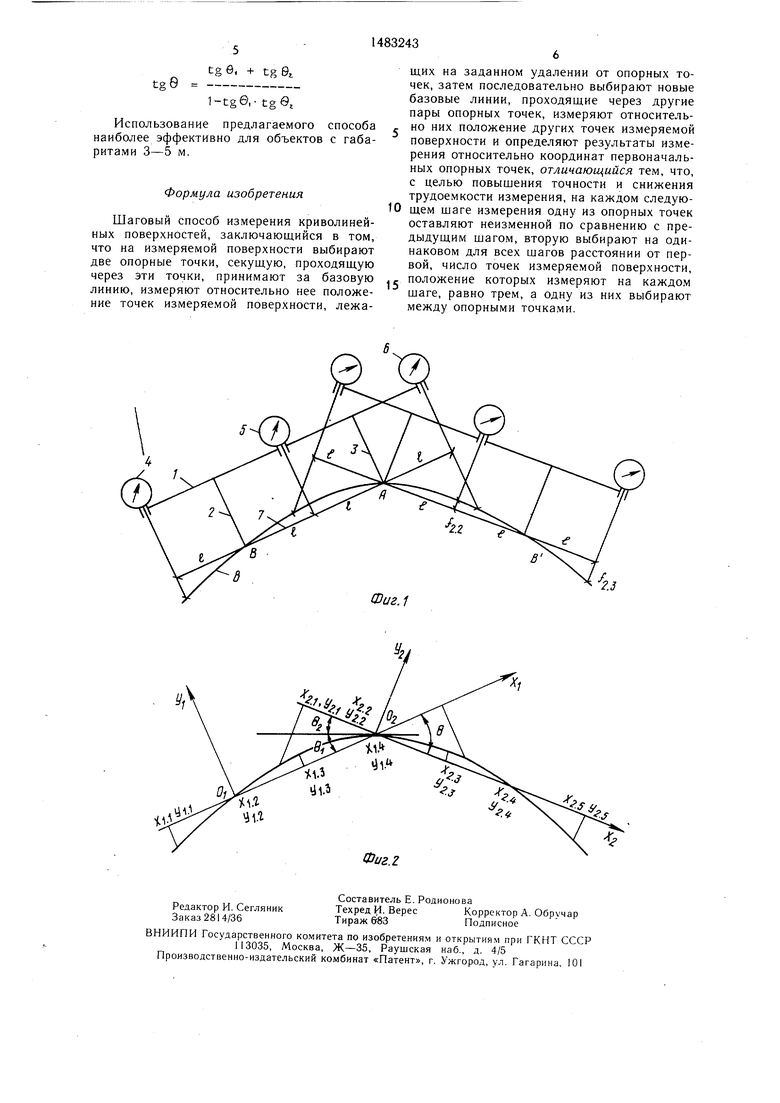
На фиг. 1 изображена схема устройства, реализующего данный способ; на фиг. 2 - схема определения угла поворота систем координат на смежных шагах измерения.
Устройство содержит скобу 1 с опорами 2 и 3 с измерительными датчиками 4-6, расположенные с шагом f относительно опор 2 и 3, и базой 7.
Способ осуществляется следующим образом.
На контролируемой криволинейной поверхности объекта задают произвольным образом плоскость измеряемого сечения 8, в котором и располагают скобу 1. Перед этим выставляют измерительные датчики 4-6 в «нуль относительно базы 7 по поверочной линейке. Посредством датчиков 4, 5, 6 измеряют расстояние f, от базовой линии, представляющей собой секущую к контуру сечения 8 и образованной базой 7, до контура сечения 8. Затем переставляют скобу 1 на следующий шаг измерения поворотом ее вокруг опоры 3 таким образом, что контакт опоры 3 с контуром сечения 8 остается в одной и той же точке А контура сечения 8, а опора 2 занимает новое положение и контакт ее с контуром сечения 8 перемещается из точки В в точку В . Точки контакта опор 2 и 3 с контуром сечения 8, расположенные на базе 7, задают таким образом новую базовую линию, относительно которой производят измерение поЈъ00 СО N3 Ј 00
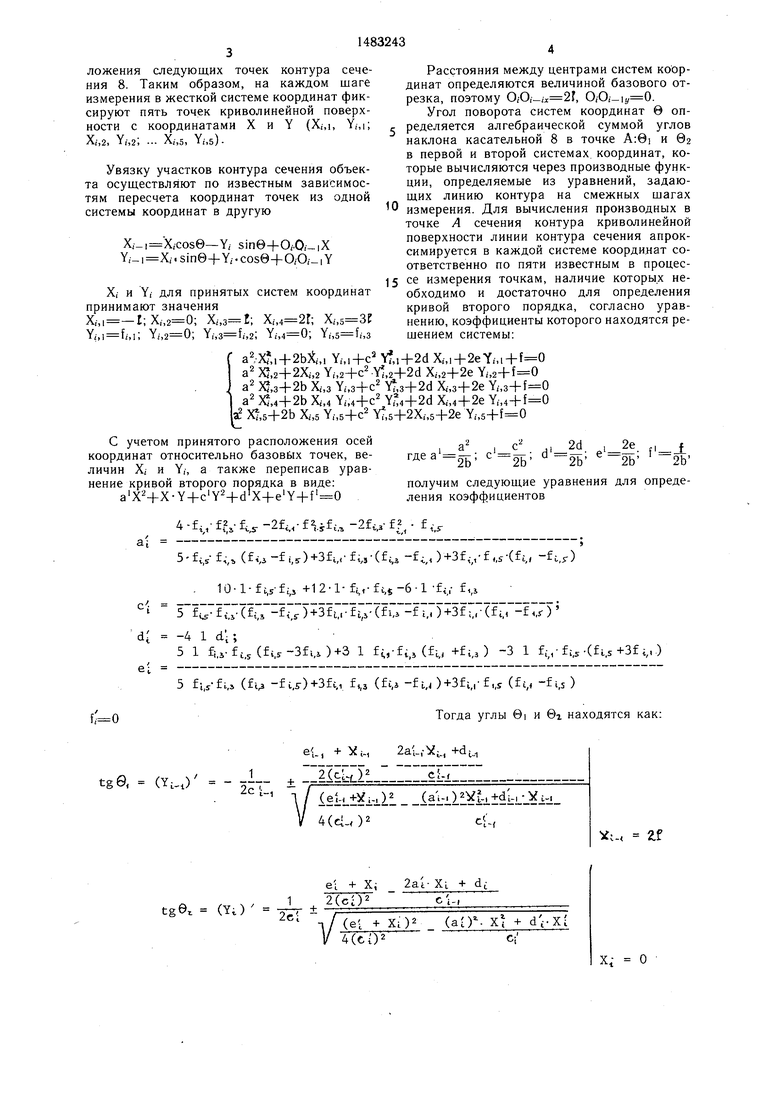
ложения следующих точек контура сечения 8. Таким образом, на каждом шаге измерения в жесткой системе координат фиксируют пять точек криволинейной поверхности с координатами X и Y (X;,i, Y,,i;
Х;,2, Y,,2; Х/,5, Y;,s)Увязку участков контура сечения объекта осуществляют по известным зависимостям пересчета координат точек из одной системы координат в другую
X,,-cos0-Y/ sin6+O,-.0, Y,(-.sin0+Y(.cos0-r-OA-iY
X,- и Y,- для принятых систем координат принимают значения
X,-,(, X,, Y(,,-,i; Y(, Y,-,(,2; Y,-, Y,-,,3
Расстояния между центрами систем координат определяются величиной базового отрезка, поэтому OfO,, O,O;-ir 0.
Угол поворота систем координат 0 оп- ределяется алгебраической суммой углов наклона касательной 8 в точке А:0 и 02 в первой и второй системах координат, которые вычисляются через производные функции, определяемые из уравнений, задающих линию контура на смежных шагах
0 измерения. Для вычисления производных в точке А сечения контура криволинейной поверхности линии контура сечения апрок- симируется в каждой системе координат соответственно по пяти известным в процес5 се измерения точкам, наличие которых необходимо и достаточно для определения кривой второго порядка, согласно уравнению, коэффициенты которого находятся решением системы:
| название | год | авторы | номер документа |
|---|---|---|---|
| Накладное измерительное устройство | 1988 |
|
SU1566194A1 |
| СПОСОБ КОНТРОЛЯ СОПРЯЖЕННОСТИ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1987 |
|
SU1839850A1 |
| СПОСОБ ГИБКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2095174C1 |
| Шаговый способ определения координат контура сечения криволинейной поверхности и устройство для его осуществления | 1988 |
|
SU1631254A1 |
| Устройство для измерения профиля криволинейных поверхностей | 1989 |
|
SU1714324A1 |
| Способ измерения кривизны внутренней поверхности экрана кинескопа | 1986 |
|
SU1415031A1 |
| Устройство для контроля криволинейных поверхностей | 1986 |
|
SU1370443A1 |
| Способ гибки изделий переменной кривизны и устройство для его осуществления | 1985 |
|
SU1355318A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ СЛОЯ С НЕЧЕТКИМИ ГРАНИЦАМИ ПО ИЗОБРАЖЕНИЮ | 2014 |
|
RU2550534C1 |
| ШАГОВЫЙ СПОСОБ КОНТРОЛЯ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1972 |
|
SU348851A1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повышение точности и снижение трудоемкости измерения криволинейных поверхностей шаговым способом, заключающимся в том, что на измеряемой поверхности выбирают две опорные точки с заданными координатами, через которые проводят секущую базовую линию, измеряют положение точек, лежащих на заданном удалении от опорных точек. Затем выбирают новую базу, проходящую через новые опорные точки, и измеряют положение новых точек измеряемой поверхности, увязывая результат измерения с координатами первоначальных опорных точек за счет того, что на каждом последующем шаге измерения одну из опорных точек оставляют неизменной, а другую выбирают на заданном расстоянии от первой, неизменном на всех шагах. Число новых точек измеряемой поверхности, положение которых измеряют на каждом шаге, равно трем, причем одну из них выбирают между опорными точками. 2 ил.
а2.-Х,1 + 2ЬХм Yb.+c2 Xbi+2eYM + а2 XS,2+2Xi,2 Y,-,2+c2.Y,2+2d X,,2+2e Y,, a2 X,3+2b XM Y;,3+c2 Yt,3+2d X,,3+2e Y,, a2 XU+2b XM YM+c2 X1-,4+2e a Xt,5+2b X,,s Y,-,5+c2 Yf,5+2X,-,5+2e Y,,
С учетом принятого расположения осей координат относительно базовых точек, величин X; и Y,-, а также переписав уравнение кривой второго порядка в виде: a X2+X-Y4-c1Y2+dtX4-e1Y+f1 0
4 -fiy ft%- f -2f,,,- f fЈл -2ft,3- fI - f t.r 5-fi|S-f,(i ( l,y)+3fl,-fi/s-(fi, -f) w( -fu,y) - lO-l-f fb +12-1- fi,f-fu,4 -6-1 Ј;,,- f,,
Г f Лf -f Л+з5t7ftft- (,7) +3f(
-4 1 d i;
e:
5 1 fi,v .O+S 1 fi,,-ftti(f-M +fi,a) -3 1 f;yf;,s.(fl.s+3fi,,)
5 fliS-fi,3 (fM -f t.r)+3ft,, fw (fc.i -f M )+3fifl-ftlS (ft,, -f i,5 )
Тогда углы 0i и ©г находятся как:
tg©, (Y) е{, + Уи 2а|-,-У-., +dui
± IllliCZluI-IIIIilZIII
20 1 / (ei-i+Xi-,)2 (a i-,)2yf.i+du,-Xt.,
4(eU)z
(YOX
2ei
el + Xj 2at- Xi + d 2(c)2
e i-,
/ (ej + Xi) (а|Г. XJ + 1/ 4(c02Ci
2d
2е
, а2 , с2 ,, Хй i ze t| ГЛР Я1-- с - н1- - р -Лгдеа 2b 2b 2b 2b 2b
получим следующие уравнения для определения коэффициентов
tl -(
XL, Zf
Xi +
e i-,
Х 0
tg8
tge, + tg& i-tge,.tgez
Использование предлагаемого способа наиболее эффективно для объектов с габаритами 3-5 м.
Формула изобретения
Шаговый способ измерения криволинейных поверхностей, заключающийся в том, что на измеряемой поверхности выбирают две опорные точки, секущую, проходящую через эти точки, принимают за базовую линию, измеряют относительно нее положение точек измеряемой поверхности, лежащих на заданном удалении от опорных точек, затем последовательно выбирают новые базовые линии, проходящие через другие пары опорных точек, измеряют относительно них положение других точек измеряемой поверхности и определяют результаты измерения относительно координат первоначальных опорных точек, отличающийся тем, что, с целью повышения точности и снижения трудоемкости измерения, на каждом следую0 щем шаге измерения одну из опорных точек оставляют неизменной по сравнению с предыдущим шагом, вторую выбирают на одинаковом для всех шагов расстоянии от первой, число точек измеряемой поверхности, положение которых измеряют на каждом шаге, равно трем, а одну из них выбирают между опорными точками.
Фиг. 2
| ШАГОВЫЙ СПОСОБ КОНТРОЛЯ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 0 |
|
SU348851A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
