00
4
СО
1
Изобретение относится к техническим измерениям в машиностроении и может быть использовано для контроля криволинейных поверхностей крупногабаритных изделий.Целью изобретения является увеличение производительности и упрощение автоматизации измерений.
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на
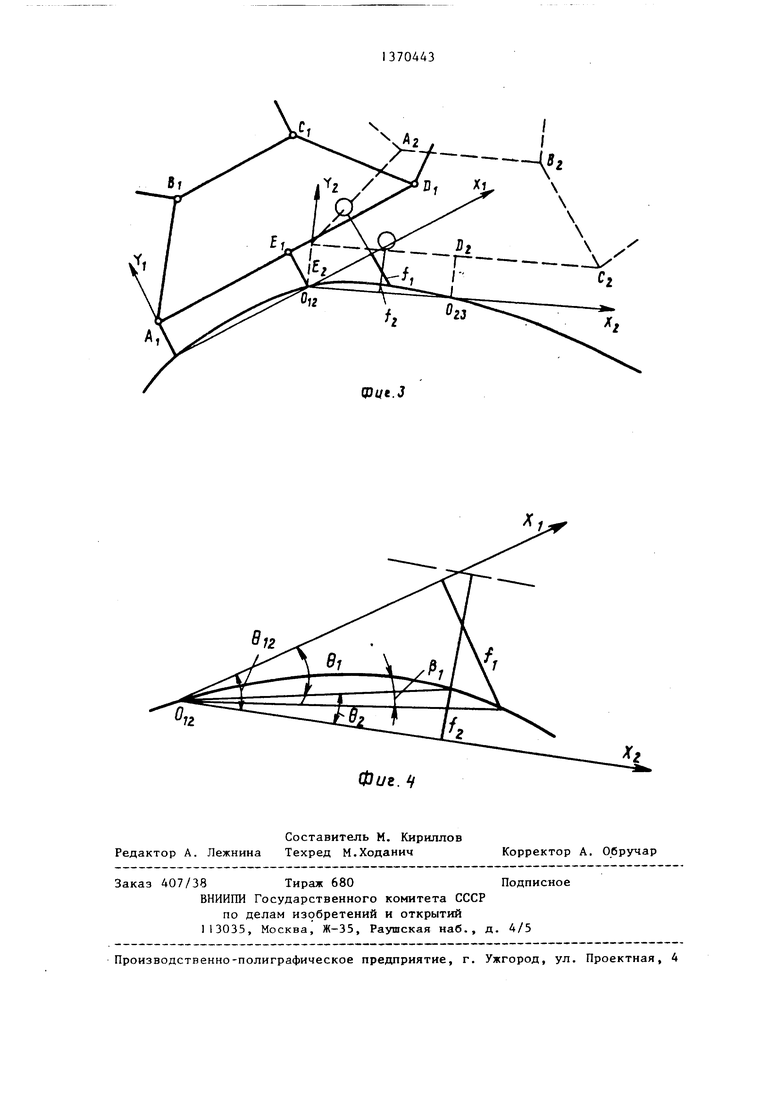
фиг. 3 - схема процесса контроля; на фиг.4 - схема определения угла поворота системы координат.
Устройство для контроля криволинейных поверхностей содержит пять одинаковых звеньев 1. Каждое звено имеет основание 2, опору 3, ограничитель 4 и измерительный преобразователь 5 перемещений (измерительную головку), закрепленный в основании с помощью перемычки с зажимом 6. Все звенья шарнирно соединены между собой осями 7 и образуют совместно пятизвенный шарнирный механизм с измерительными преобразователями по числу звеньевi установленными каждый в середине соответствующего звена.
При контроле криволинейных поверхностей производят измерения шаговым методом координат точек контролируемого сечения. Устройство накладывают на поверхность вдоль контролируемого сечения. С помощью измерительной головки, установленной на звене Е,D, (фиг. 3), измеряют расстояние f до поверхности в положении, определяем системой координат Y,0,,,X, (сплошны линии). Затем устройство переставля на шаг а, равньш расстоянию между оп орами, поворотом шарнирного механизма и накладывают на поверхность
10
15
20
в положение, определяемое системой координат У,0„Х, (пунктирные линии). При этом,с помощью измерительной головки измеряют расстояние f,. Согласно фиг. 4 угол j поворота системы координат У,0„ Xj относительно системы координат Y,, равен:
0,,,+ е,-/.
где б, -arctgf /a; б arctgf /а; р - погрешность увязки систем координат, равная при практических измерениях примерно 0,002б.
Затем производят перевод координат измеренных точек из второй системы координат в первую: X,2a+X,,cos e,-YjSine , Y,X sin0,, +Yjcose,, . Далее производят перенос устройства на следующий шаг, измерение следующего расстояния fj и вычисление координат измеренных точек последовательно из системы в систему до получения координат в первой системе координат.
0
0
5
Формула изобретения
Устройство для контроля криволинейных поверхностей, содержащее основание, предназначенное для взаимодействия с контролируемой поверхностью, две опоры и измерительный преобразователь перемещений, отличающееся тем, что,с целью увеличения производительности и упрощения автоматизации, оно снабжено четырьмя дополнительными звеньями с соответствующими парами опор, обра- зующими совместно с основанием пяти- звенный шарнирный механизм, и измерительными преобразователями по числу звеньев, установленными каждый в середине соответствующего звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Накладное контрольное устройство | 1986 |
|
SU1415028A1 |
| СПОСОБ КОНТРОЛЯ НЕПЛОСКОСТНОСТИ ЛИСТОВЫХ ИЗДЕЛИЙ И СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2254556C2 |
| Устройство для контроля диаметров изделий | 1990 |
|
SU1744447A2 |
| Шаговый способ измерения криволинейных поверхностей | 1987 |
|
SU1483243A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УСТАНОВКИ КОЛЕС И ПОЛОЖЕНИЯ ОСЕЙ И МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2314492C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ РАБОЧЕГО ОРГАНА ПРИ ВЫКОПКЕ РАСТЕНИЙ | 2018 |
|
RU2685143C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧЕК КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2003 |
|
RU2239505C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧЕК КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2005 |
|
RU2291751C1 |
| СПОСОБ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2013 |
|
RU2530428C1 |
| СПОСОБ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ТЕПЛОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК МНОГОСЛОЙНЫХ КОНСТРУКЦИЙ В НЕСТАЦИОНАРНЫХ УСЛОВИЯХ ТЕПЛОПЕРЕДАЧИ | 2009 |
|
RU2403562C1 |
Изобретение относится к техническим измерениям в машиностроении. Целью изобретения является увеличение производительности и упрощение автоматизации измерений. Устройство для контроля криволинейных поверхностей содержит пять одинаковых звеньев 1 , образуюгцих совместно пятизвенный шарнирный механизм с измерительными преобразователями 5 по числу звеньев, установленными каждый в середине соответствующего звена. При контроле криволинейных поверхностей производятся измерения шаговым методом координат точек контролируемого сечения. Устройство накладывается опорами 3 на контролируемое изделие. Измерительный преобразователь на звене, опирающемся на ограничитель 4, измеряет расстояние до контролируемой поверхности в первом положении относительно первой системы координат. Затем устройство переставляется на один шаг поворотом шарнирного механизма. Производится измерение расстояния до контролируемой поверхности во втором положении относительно второй системы координат и переводится в первую систему координат. Далее измерения и вычисления продолжаются аналогично до прохождения всего контролируемого сечения. 4 ил. с (Л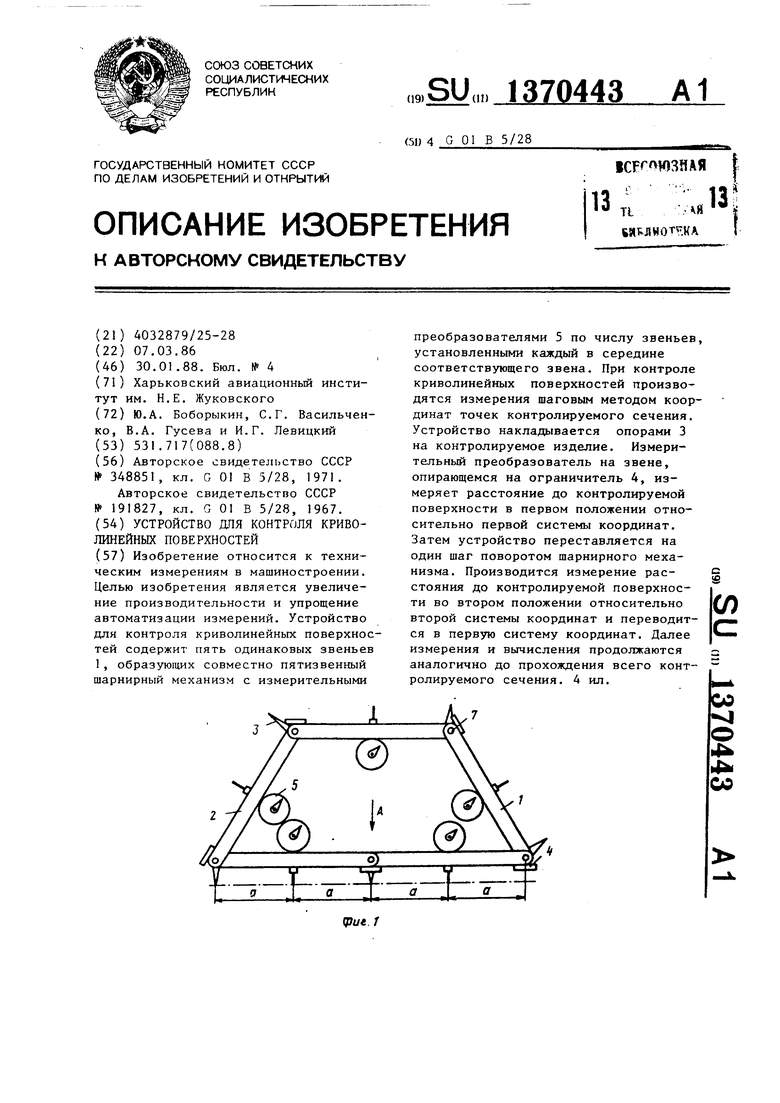
ВидА
О
Фиг. 2
li
/-
ОЗце.З
Фиг. Ч
| ШАГОВЫЙ СПОСОБ КОНТРОЛЯ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 0 |
|
SU348851A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ШАГОВОГО КОНТРОЛЯ ПРОФИЛЯ ПОВЕРХНОСТИ | 0 |
|
SU191827A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
