измерения (см.фиг.1). Измеряют длину контура li между первоначальным положением опорных точек А и - |АБ (см.фиг.2). Измеряют угол в наклона к горизонту пря- мой, соединяющей опорные точки (см.фиг.З). Перемещают опорные точки по контролируемому контуру (см.фиг.4) на величину шага так, чтобы перемещение задней точки по контуру было равно длине контура между первоначальным положением точек Зз - и одновременно измеряют длину пути, пройденного по контуру передней точкой Sn h+1 IBB (фиг.5). Измеряют угол $2 наклона к горизонту прямой, соединяющей опорные точки, занявшие положение Б - В, после чего многократно по- вторяют действия по перемещению опорных точек на шаг и измерение угла наклона к горизонту прямой, их соединяющей, до тех пор, пока не будет пройден весь контур. В результате измерения определяют координаты точек контура, отстоящих на шаг друг от друга (см.фиг.7).
Реализация шагового способа определения координат контура сечения устройством осуществляется в следующей последовательности.
В опорную точку А, координаты которой известны, устанавливают заднее колесо 2, а по положению переднего колеса отмечают вторую опорную точку Б. Поставив устройство передним колесом в точку А, обнуляют все устройство при помощи узла 11 общего обнуления (фиг.9) и, перемещая устройство, измеряют длину контура между опорными точками А и Б при помощи датчика 3 пути. Результаты вводятся в блок 7 памяти. Блоком 10 производится обнуление датчиков 3 и 4 пути, после чего блок 9 управления дает команду на измерение угла $1 наклона устройства к горизонту при помощи угломера 5, а результат измерения передается в блок 7 памяти. Устройство за рукоятку 6 начинают перемещать по контролируемому контуру сечения, измеряя пройденный путь обеими датчиками 3 и 4. Перемещение происходит до тех пор, пока длина пути, пройденного по контуру задним колесом, информация о котооой поступает в блок 8 сравнения, че станет равной длине контура между точками ,а и Б. переданной из блока 7 памяти. Блок Э упраале /а дает команду на останов. Длина пути -и лрнная пере дним колесо 1 замерен ая д -ч. ПУТИ
и равная длине контура между точками Б и В, фиксируется в блоке 7 памяти. Блоком 10 производится обнуление датчиков 3 и 4 пути, блок 9 управления дает команду на изме- рение угла &i наклона устройства к горизонту, результат передается в блок 7 памяти, и устройство готово к следующему шагу.
После контроля всего контура углы в, соответствующие проведенному числу шагов, выдаются блоком 7 памяти и производят вычисление координат точек профиля.
Формула изобретения
1.Шаговый способ определения коор- динат контура сечения криволинейной поверхности, заключающийся в том, что выбирают на контролируемом контуре две опорные точки с известными координатами одной из них и известным расстоянием между ними, принятым за шаг измерения, измеряют угол наклона к горизонту прямой, соединяющей опорные точки, многократно перемещают их по контролируемому контуру на величину шага, измеряют на каждом
шаге угол наклона к горизонту прямой, соединяющей опорные точки, и по результатам измерения определяют координаты точек контура, отличающийся тем, что, с целью повышения точности, измеряют длину контура между опорными точками в их первоначальном положении и на каждом шагу, а многократное перемещение точек на величину шага осуществляют так, чтобы перемещение задней точки на каждом шаге
было равно длине контура между опорными точками, измеренной на предыдущем шаге.
2.Устройство для определения координат контура сечения криволинейной поверхности, содержащее корпус и установленные на нем угломер и две опоры, отличающееся тем, что опоры выполнены в виде колес эталонного диаметра, а устройство снабжено установленными
на корпусе двумя датчиками длин пути соответствующих колес, связанным с ними блоком их обнуления, блоком памяти, связанным с датчиком первого колеса, блоком сравнения, связанным с датчиком второго колеса и с блоком памяти, блоком управления, связанным сугломером и с блоками памяти сравнения и обнуления датчиков длин, и блоком общего обнуления устройства.
,A-5
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| Устройство для измерения профиля криволинейных поверхностей | 1989 |
|
SU1714324A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| Мобильный сканер для определения качества поверхности сварного шва | 2016 |
|
RU2644617C2 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| КУРВИМЕТР ДОРОЖНЫЙ | 2023 |
|
RU2808440C1 |
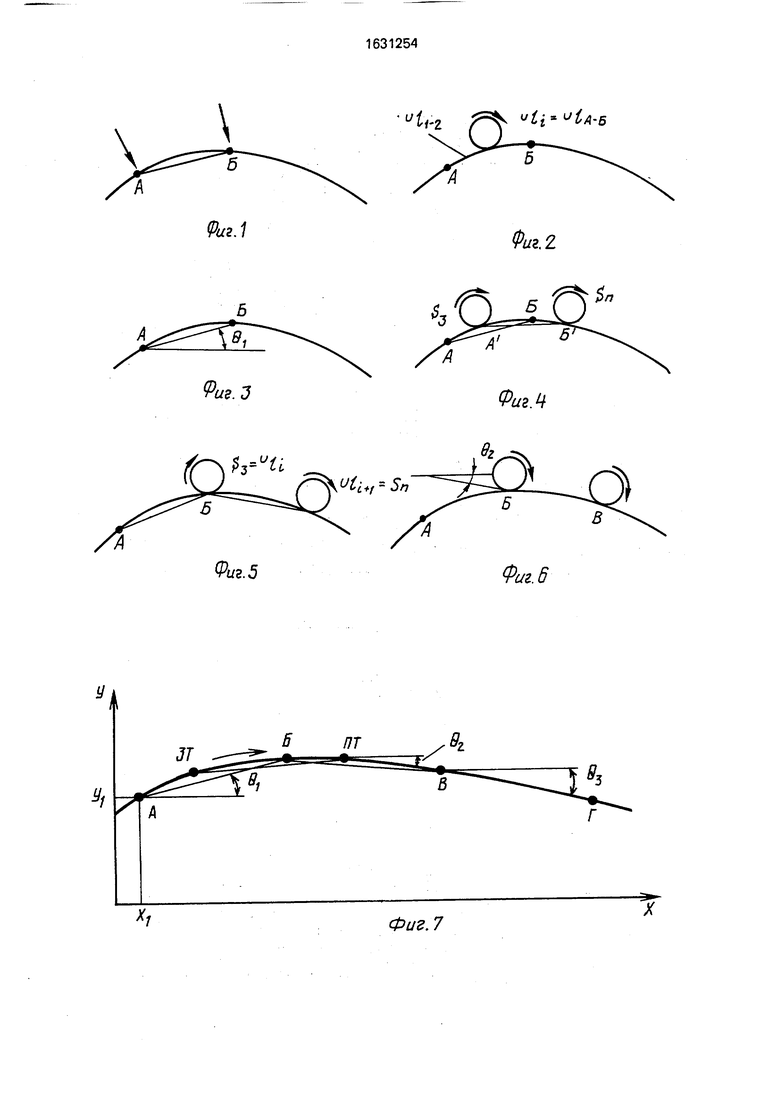
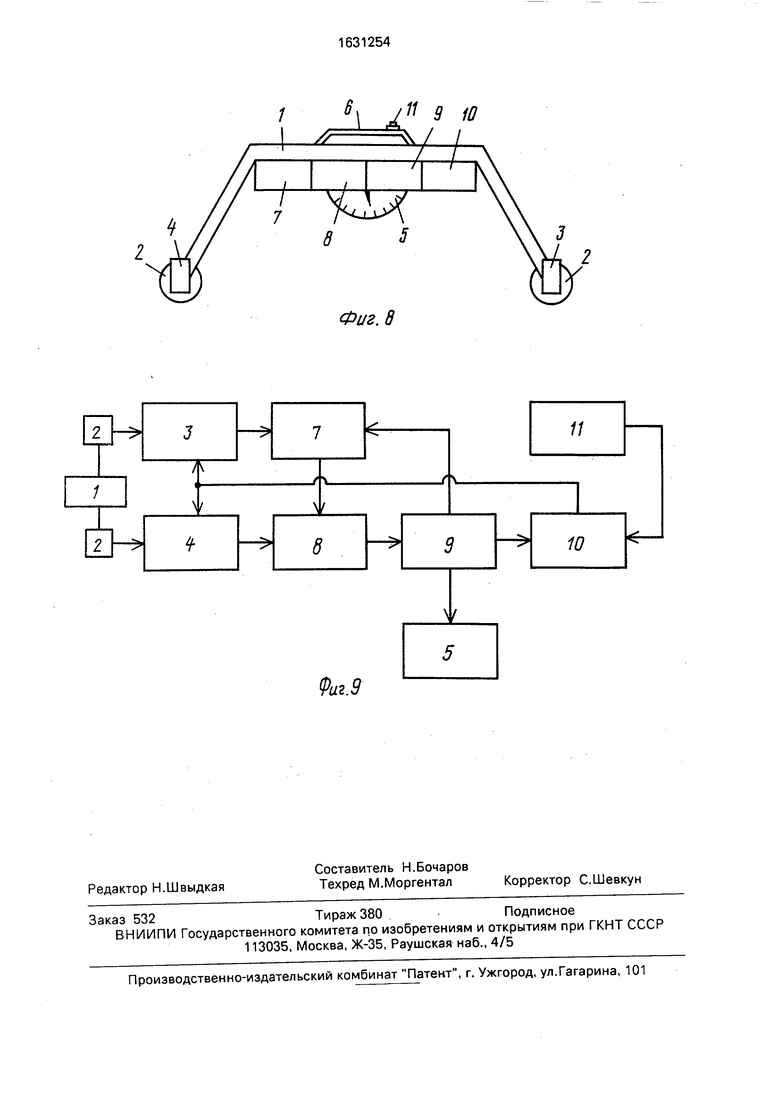
Изобретение относится к области технических измерений. Целью изобретения является повышение точности. На контролируемом контуре выбирают две опорные точки, координаты одной из которых известны, а другая определяется по положению второй опоры двухопорного Изобретение относится к техническим измерениям. Целью изобретения является повышение точности. На фиг.1 - 6 показаны приемы, реализующие данный способ; на фиг.7 - схема определения координат профиля; на фиг.8 - устройство для реализации способа, общий вид; на фиг.9 - принципиальная схема взаимосвязи узлов и блоков устройства. Устройство для определения координат контура сечения криволинейной поверхности (см.фиг.8) содержит корпус 1 и установустройства, первую опору которого устанавливают в первую опорную точку. Расстояние между опорными точками принимают за шаг измерения. Измеряют угол наклона к горизонту прямой, соединяющей опорные точки при помощи угломера, расположенного на корпусе устройства, а при помощи датчиков длин пути, пройденных опорными точками по контуру сечения, определяют расстояние между опорными точками в их первоначальном положении. Многократно перемещают опорные точки по контролируемому профилю на величину шага, измеряя при этом длины путей, пройденных передней и задней опорными точками по контуру сечения, и угол наклона к горизонту прямой, соединяющей опорные точки в конце каждого шага. Перемещение опорных точек устройства на величину шага осуществляют так, чтобы перемещение задней точки на каждом шаге было равно длине контура между опорными точками, измеренной на предыдущем шаге передней точкой. 2 с.п. ф-лы, 9 ил. ленные в нем две опоры 2, выполненные в виде колес эталонного диаметра, датчики 3 и 4 длин пути соответствующих колес, угломер 5, рукоятку 6 для перемещения, блок 7 памяти, блок 8 сравнения, блок 9 управления, блок 10 обнуления датчиков длин и узел 11 общего обнуления устройства. Способ осуществляется следующим образом. На контролируемом контуре выбирают две опорные точки А и Б с известными координатами одной из них и известным расстоянием между ними, которое принимают за шаг 00 С о со ю ел 4
Риг.1
Риг.З
(
,/ 5/7
Фиг. 5
Фиг. 2
Фиг.Ч
Фиг. 6
В,
Фиг.7
/Я 9 Ю
8
-
8
Фиг.9
Фиг. В
11
10
| Бирюков Г.С | |||
| и Серко А.П | |||
| Измерения геометрических величин и их метрологическое обеспечение, М., 1987, с | |||
| Прибор для определения при помощи радиосигналов местоположения движущегося предмета | 1921 |
|
SU319A1 |
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
