Известны регуляторы ограничения скорости изменения параметра, содержащие элементы нневмо- и гидро-автоматики.
Описы ваемое устройство отличается от известных тем, что оно содержит мембраны с различной эффективной площадью. Это позволяет получить переменное значение оптимальной скорости изменения регулируемого параметра в зависимости от статической величины самого параметра.
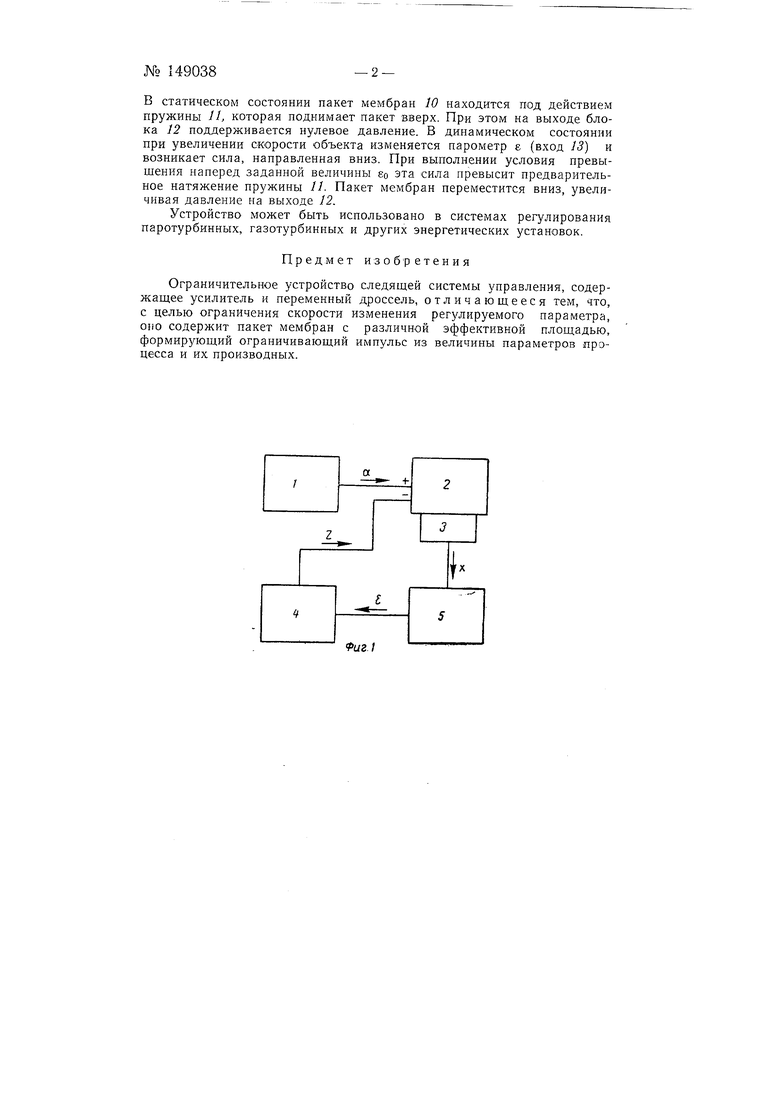
Скелетная схема ограничительного устройства следящей системы управления приведена на фиг. 1; конструкция устройства - на фиг. 2.
Система содержит датчик 1, блок 2 суммирования, который может быть совмещен с исполнительным механизмом 5, и блок 4 ограчи ения скорости объекта 5. Датчик / позволяет мгновенно наращивать нагрузку, изменяя скачком входной сигнал а. Этот сигнал поступает на блок 2 суммирования и вызывает однозначное увеличение выходного сигнала блока суммирования, разгоняющего объект. При разгоне объекта происходит нарастание параметра е, который поступает на блок 4, измеряющий скорость нарастания этого параметра. В статическом состоянии выходной сигнал Z блока 4 равен нулю. При превыщении некоторой заранее заданной величины изменения скорости ео сигнал на выходе блока 4 становится больще нуля. Сигнал Z поступает на блок 2 суммирования в полярности, уменьщающей сигнал X, разгоняющий объект 5.
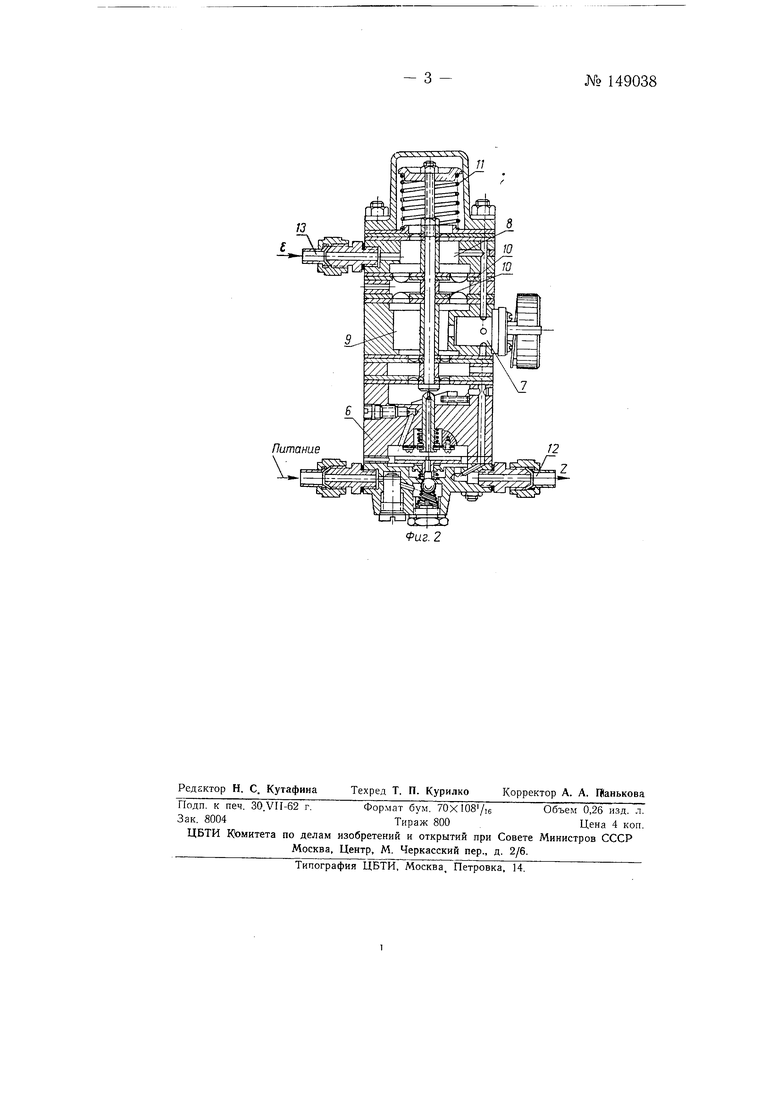
Конструкция блока ограничения скорости изменения параметра приведена на фиг. 2.
Устройство содержит усилитель 6 и переменный дроссель 7. Пневматический сигнал, пропорциональный параметру е, подается в полость 8 непосредственно, а в полость 9 - через переменный дроссель 7.
В статическом состоянии пакет мембран 10 находится под действием пружины 11, которая поднимает пакет вверх. При этом на выходе блока 12 поддерживается нулевое давление. В динамическом состоянии при увеличении скорости объекта изменяется парометр е (вход 13) и возникает сила, направленная вниз. При выполнении условия превышения наперед заданной величины 8о эта сила превысит предварительное натяжение пружины //. Пакет мембран переместится вниз, увеличивая давление на выходе 12.
Устройство может быть использовано в системах регулирования паротурбинных, газотурбинных и других энергетических установок.
Предмет изобретения
Ограничительное устройство следящей системы управления, содержащее усилитель и переменный дроссель, отличающееся тем, что, с целью ограничения скорости изменения регулируемого параметра, оно содержит пакет мембран с различной эффективной площадью, формирующий ограничивающий импульс из величины параметров процесса и их производных.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| СИГНАЛИЗАТОР | 1967 |
|
SU201168A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХОСНОЙ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839975A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА В ЧАСТОТУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413269C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
ri
-CtljZSD Фиг. 2
