;о
00

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
| Весы | 1982 |
|
SU1137324A1 |
| Устройство для аттестации большегрузных образцовых гирь | 1979 |
|
SU773444A1 |
| Устройство для определения моментного веса лопаток турбин | 1983 |
|
SU1143985A1 |
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| Устройство для непрерывного измерения и контроля насыпного веса сыпучего материала | 1977 |
|
SU678319A2 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
Изобретение относится к динамометрической технике, а именно к автоматическим устройствам аналитического типа, применяемым для проведения физико-технических, термо-физических и термогравиметрических измерений. Цель изобретения - повышение точности. На грузоприемные площадки 16 и 17 в верхнем положении арретира 41 и его упоров 39 и 40 устанавливают исследуемый образец 18 и тарный груз 19, при этом после разарретирования угол отклонения коромысла 1 ΔY за счет подбора груза 19 устанавливают равным 0. Небольшие отклонения угла ΔY от нуля уравновешивают путем ввода тока J0 от блока 36 установки нуля. Подъемом /опусканием/ гаек 7 и 8 добиваются положения безразличного равновесия коромысла 1, при котором показания АЦП 38 в любом положении выключателя 45 неизменны. После проверки точек начального равновесия включают устройство 44 физического воздействия, создающее электромагнитную силу FX, под действием которой коромысло 1 наклоняется и преобразователь 4 некомпенсации вырабатывает электрический сигнал ΔUвх, который после усиления усилителем 30 поступает в обмотки 22 катушек 21 обратных преобразователей 20. В обмотках 22 создается электромагнитная сила, действующая на разнополярные магниты 25 и 26, связанные с грузоприемными подвесками 12 и 13 и расположенные таким образом, чтобы средние точки этих магнитов находились в плоскостях торцов 27 и 28 катушек 21. При этом обратные преобразователи 20 расположены выше опорной 2 и концевых 11 призм. В случае измерения повышенных значений FX используют блок ступенчатого уравновешивания, связанный с обмотками 23 катушек 21. Обмотки 24 катушек 21 связаны с блоком 36 установки нуля. 1 ил.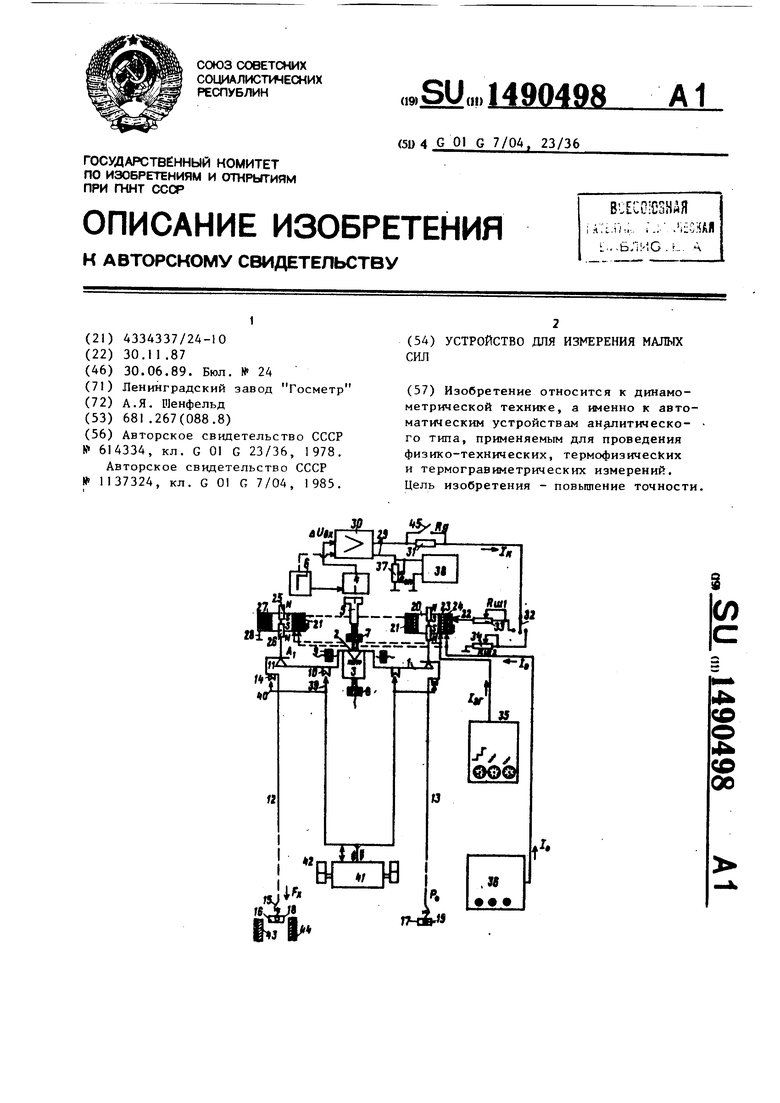
12
П
lit
I
А
,1.
/
пчЬ
Ha грузоприемныа площадки 16 и 17 в верхнем положении арретира 41 и его упоров 39 и 40 уста; авливают исследуемый образец 18 и тарный груз 19, при этом после разарретирования уго отклонения коромысла 1 с/ за счет побора груза 19 устанавливают равным 0 Небольшие отклонения угла /51/ от нуля уравновешивают путем ввода тока Ij, от блока 36 установки нуля. Подъемом (опусканием) гаек 7 и 8 добиваются положения безразличного равновесия коромысла 1, при котором показания АЦП 38 в любом положении выключа- теля 45 неизменны. После проверки точек начального равновесия включают устройство 44 физического воздействия, создаюшее электромагнитную силу F, под действием которой ко- ромысло 1 наклоняется и преобразоИзобретение относится к динамометрической технике, а именно к автоматическим устройствам аналитическог типа, применяемым для проведения физико-технических, термофизическихи и
термогравиметр1гческих измерений. t
Цель изобретения - повышение точности измерения малых сил.
На чертеже изображено предлагаемое устройство.
Устройство содержит коромысло 1 , установленное через опорную призму 2 на основании 3. Коромысло 1 снабжено узлом рассогласования с преобразователем 4 некомпенсации и флажком 5. Преобразователь 4 некомпеясации питается от генератора 6 высокой частоты. К коромыслу 1 прикреплены гай- ки 7 (Точно) и 8 (Грубо) регулятора чувствительности, балансиры 9, подпятники 10 и концевые призмы 1
На концевых призмах 11 установлены грузоприемные подвески 12 и 13, снабженные подпятниками 14, шарнирами 1 5 для грузоприемных площадок 16 и 17 соответственно для исследуемого образца 18 и тарного груза 19, а также двумя обратными преобразовате- лями 20, выполненными в виде двух катушек 21 с аксиально размешенными внутри тремя обмотками 22-24, и двух пар подвижных, цилиндрических, вер
ватель 4 некомпенсаиии вырабатывает электрический сигнал .вх - который после усиления усилителем 30 поступает в обметки 22 катушек 21 обрат 1ых преобразователей 20. В обмотках 22 создается электромагнитная сила, действующая на раэнополярные магниты 25 и 26, связанные с грузоприемными подвесками 12 и 13 и расположенные таким образом, чтобы средние точки /)тих магнитов находились в плоскостях торцов 27 и 28 катушек 21. При этом обратные преобразователи 20 расположены выше опорной 2 и концевых 11 призм В случае измерения повышенных з 1аче- ний Т используют блок ступенчатого уравновешивания, связанный с обмотками 23 катушек 21. Обмотки 24 катушек 21 связаны с блоком 36 установки нуля . 1 ил.
0
5
О 5
0
тикально ориентированных постоянных магнитов 25 И 26, соединенных разноименными полюсами и закрепленных на грузоприемных подвесках 12 и 13 внутри катушек 21 так, что в исходном положении подвесок 12 и 13 средние точки магнитов 25 и 26 находятся в плоскостях торцов 27 и 28 катушек 21 . При этом обратные преобразователи 20 расположены вьш1е опорной 2 и конценых 11 призм (выше линии А,-А).
Обмотки 22-24 подключены соответственно к выходу узла рассогласования
29(через усилитель 30, балластный резистор 31, переключатель 32 диапазонов и шунтирующие резисторы 33 и 34), к выходу блока 35 ступенчатого уравновешивания и к выходу блока 36 установки нуля, (Нормирующими токи 1, Ij и IP . Выход усилителя
30с(:-динен с опорным резистором 37 , к которому подключен аналого-цифровой преобразователь (АЦП) 38. Подпятники 10 и взаимодействуют с вертикально перемещаемыми упорами 39 и 40 арретира 41 с 42 управления. Камера 43 с устройством 44 физического воздействия служит для нагрева исследуемого образна 18 или ввода другого физического ноз- мущения. Выклкнатель 45 подключен
в параллель к балластному резистору 31 .
Устройство работает следующим образом.
На грузоприемные площадки 16 и: 17 в верхнем положении арретира 41 и его упоров 39 и 40 устанавливают исследуемый образец 18 и тарный груз 19. После разарретирования угол й( отклонения коромысла 1 (за счет подбора груза 19) устанавливают равным нулю, т.е. /1(/ 0. Небольщие отклонения угла uif от нуля уравновешивают путем ввода тока 1 от блока 36 установки нуля. Затем путем подъема (опускания) гаек 7 и 8 добиваются положения безразличного равновесия коромысла 1. Контроль этого положения ведут путем съема и наложения исследуемого образца 18 с гру- зопряемной площадки 16 и наблюдений показаний АЦП 38 в двух положениях (Контроль и Работа) выключателя 45. В положении безразличного равновесия коромысла 1, при котором гайки 7 и 8 находятся в нужном по высоте положении, показания АЦП 38 в любом положении выключателя 45 неизменны.
После проведения необходимых one - раций на площадки 16 и 17 окоггчатель но устанавливают образец 18 и тарный груз 19, проверяют точки начального равновесия ((, лив 0 и I , 0) , а затем включают устройство 44 физического воздействия, создающее электромагнитную силу F. Под действием силы F, коромысло 1 наклоняется на угол dLf, в результате чего преобразователь 4 некомпе :сации вырабатывает электрический сигнал & -и (в виде компенсационного тока IУ) , который после усиления усилителем 30 через выключатель 45, шунтирующий балластный резистор 31 , пере- клкяатель 32 диапазонов и щунтирую- щий резистор 33 (или 34) поступает в обмотки 22 катушек 21, которые создают электромагнитную силу, действующую на соединенные разноименными полюсами nocTOHF Hbie магниты 25 и 26. При этом за счет разнополярной установки магнитов 25 и 26 на грузо- приемных подвесках 12 и 13 один из магнитов всегда подмагничивается током 1ц., а второй магнит настолько же размагничивается, оставляя неизменным коэффициент обратного преобразования обратных преобразователей 20 повышая тем самым точность измерения
4904986
силы Fj(. Отсчет значений силы F ведется по АЦ11 38, показания которого пропорциональны падению напряже- кия UK IK-ROOI г-де ROD - сопротивление опорного резистора 37, про- градуированного в единицах сил Сили массы in ) :
K,-IK К.-и,
гах Kj и,
(1) (2)
где К, К2
и Kj - масштабные коэффициенты.
В случае измерения повышенных значений F или т, когда емкости шкалы АЦП 38 не хватает, используется блок 35 ступенчатого уравнове- щивания, подающий ток Tj. ступенчатого вида, пропорциональный измеряемой силе F д- или массе т .
F, К, и, + К,1,, ; (3) т К,и + К.; ;(4)
где К и Kg - масштабные коэффициенты;
ft показания блока 35 ступенчатого уравновешива- ния.
Градуировку устройства ведут с помощью тарного груза 19, устанавливаемого на грузоприемную площадку 16 (или 17). Выбор положения переключа- теля 32 диапазонов определяется величиной F j (тп) .
Формула изобретения
Устройство для измерения мальгх
сил, содержащее опорную призму, на которой установлено коромысло с концевыми призмами, грузоприемные подвески, связанные с концевыми призмами, узел рассогласования, связанный
с коромыслом, два обратных преобразователя в виде катушек с первыми обмотками, внутри которых расположены цилиндрические, вертикально ориентированные постоянные магниты, закрепленные на грузоприемных подвесках, и блок уравновешивания, вход которого подклкнен к выходу узла рассогласования, а выход - к первым обмоткам, отличающееся тем, что, с
целью повышения точности, оно снабжено блоком ступенчатого уравновешивания, блоком установки нуля, двумя дополнительными магнитами, идентичными первым и связанными с ними, и четырь
мя дополнительньми обмотками, попар-ля соответственно, при этом обратные
но размещенньми на катушках аксиаль-преобразователи расположены вьше .
но первым обмоткам и подключенньни копорной н концевых призм, а средние
выходу блока-ступенчатого уравновеши- ,точкн магнитов - в плоскостях торцов
вания и к выходу блока установки ну-катушек.
| Весы для термомассометрических исследований | 1975 |
|
SU614334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весы | 1982 |
|
SU1137324A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
