(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ
ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра масс изделия | 1982 |
|
SU1021962A1 |
| Устройство для аттестации большегрузных образцовых гирь | 1979 |
|
SU773444A1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО РБ[ЧАЖНБ1Х ВЕСОВОВ Г'5ФОИ S^:^^^"?TOB | 1972 |
|
SU432349A1 |
| Рычажные весы с арретирующим устройством | 1979 |
|
SU935712A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2008 |
|
RU2383872C1 |
| Устройство для определения статических моментов и моментов инерции изделий | 1985 |
|
SU1596216A1 |
| Весоизмерительное устройство | 1983 |
|
SU1143988A1 |
| Инклинометр | 1991 |
|
SU1800014A1 |
| Устройство для взвешивания слитков | 1990 |
|
SU1760364A1 |
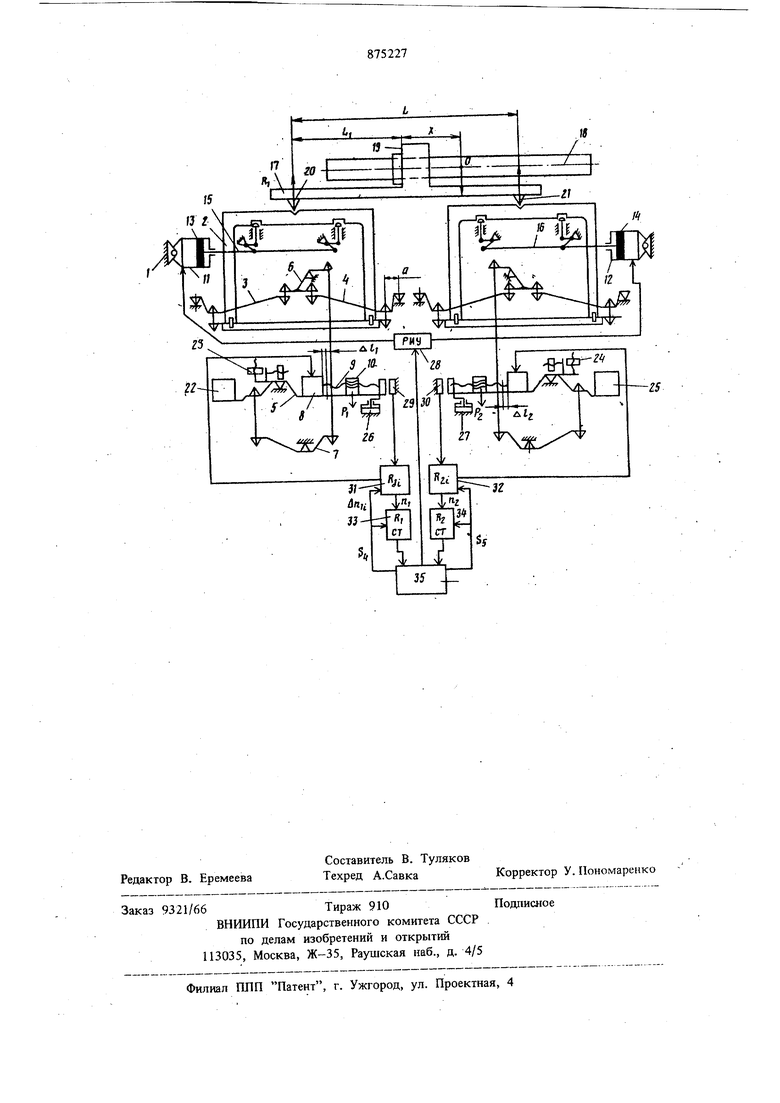
Изобретение относится к испытательной технике и может быть использовано для определения координаты центра тяжести протяженных изделий. Известно устройство для определения центра тяжести изделий, содержащее карданную подвеску с грузоприемной платформой и установленные на подвеске уравновешивающие rpjj зы и электроприводы для перемещения грузов 1. Недостатком этого устройства является то, что оно не позволяет определять центр протяженных изделий. Наиболее близким по технической сущности к изобретению является устройство для определения центра тяжести изделий, содержащее основание, установленные на нем два весоизмерительные узла, выполненные каждый в виде пружинных весов, и кинематически связанную с узлами грузоприемную раму для изделия 2. Недостатком известного устройства является то, что в нем применен принцип непосредственных измерений опорных -реакций с помощью весов механического типа, вследствие чего оно имеет невысокую точность и быстродействие,. а также ограниченный диапазон измерения. Цель изобретения - повышение точности и быстродействия. Поставленная цель достигается тем, что устройство снабжено механизмом циклического арретирования, выполненным в виде двух пневмогидравлических цилиндров с поршнями и щтоками, а каждый весоизмерительный узел выполнен в виде рамки, кинематически связанной с одним из штоков с возможностью ее перемещения .в вертикальном направлении, установленных на основании двух промежуточных коромысел, взаимодействующих с рамкой, измерительного короМысла и двух разгрузочных рычагов, взаимодействующих между собой и, соответственно, с измерительным коромыслом и обоими промежуточными коромыслами, и закрепленного на измерительном коромысле шагового электропривода с ходовым винтом и гайкой. На чертеже представлено схематическое изображение устройства. Устройство содержит основание 1,,установленные на нем два весоизмерительных узла, вьтолненные каждый в виде рамки 2, уста; новленных на основании 1 двух промежуточ: ных коромысел 3 и 4, взаимодействующих с рамкой 2, измерительного коромысла 5 и дву разгрузочных рычагов 6 и 7, взаимодействующих между собой и, соответственно, с обоимн промежуточными коромыслами 3 и 4 и измерительным коромыслом 5, и закрепленного на измерительном коромысле шагового электропривода 8 с ходовым винтом 9 и гайкой 10. Устройство содержит также механизм циклического арретирования, выполненный в виде двух пневмогидравлических цилиндров 11 и 12, шарнирно установленных на основании 1, с поршнями 13 и 14 и штоками 15 и 16, направленными горизонтально. Рамка каждого весоизмерительного узла кинематически связана с одним из штоков 15 и 16 с возможностью ее перемещения в вертикальном направ лении. Грузоприемная рама 17 для изделия 18 снабжена упорной стойкой 19, призмами 20 н 21 и установлена этими призмами на обе рамки весоизмерительных узлов. Устройство содержит также установленные на измерительных коромыслах противовесы 22 к 23 п узлы 24 и 25 для регулировки чувствительности и нулевой точки, а также установленнь1е на основании успокоители 26 и 27, релейно-исполнительный узел 28, предназначенный для управления цилиндрами 11 и 12. Устройство содержит также электронные измерительно-преобразовательные блоки: нульдикаторы 29 и 30, определяющие величину и знак разбаланса измерительных коромысел, блоки 31 и 32 для формирования и счета тактовых импульсов, входы которых подклю чены к нуль-индикаторам 29 и 30, а выходы - к шаговым электроприводам 8, блоки 33 и 34 для определения усредненных значений опорных реакций, входы которых подключены к блокам 31 и 32, и счетно-решающий блок 35, входы которого подключены к блокам 33 и 34, а выход - к релейноисполнительному узлу 28. Расстояние L между призмами 20 и 21, а также расстояние L между призмой 20 и упорной стойкой 19 являются заранее заданными с высокой точностью величинами. Расс яние X между стойкой 19 и точкой О (цент ром тяжести изделия) является измеряемой величиной., Устройство работает следующим образом. В исходном положении при отсутствии на грузоприемной раме 17 изделия 18 рамки 2 С ПОМОЩЬЮ механизмов цикли11еского арретирования разарретируются и производится начальное уравновешивание измерительных коромысел 5 с помощью узлов 24 и 25 регулировки начальной точки,, а также посредством включения шаговых электроприводов 8, перемещающих гайки 10 до тех пор, пока показания нуль-индикаторов 29 и 30 не будут равны нулю. Одновременно с помощью узлов 24 и 25 ведется настройка измерительных коромысел на требуемую чувствительность. После проведения указанных подготовительных операций производится сброс показаний блоков формирования и счета тактовых импульсов 31 и 32, определяющих угол поворота щаговых злектроприводов и величину начальных смещений гаек 10, т.е. производится сброс памяти блоков 31 и 32 и блоков 33 .и 34 усреднения реакций. При установке на раме 17 изделия 18 с координатой центра тяжести X и массой М на опорных рамках 2 возникают дополнительные нагрузки и опорные реакции определяются по уравнениям . ()Mc5-LR, (1) V.. где 5 - ускорение свободного падения. Из уравнений (1) и (2) значение коорди- наты X равно Q R:;TR При разарретировании рамок 2 нагрузки, пропорциональные реакциях Й, Со передаются на измерительные коромысла 5, разбалансируя последние и создавая- на нуль-индикаторах 29 и 30 сигналы разбаланса, которые подаются в блоки формирования и счета тактовых импульсов 31 и 32. Эти блоки формируют тактовые импульсы для шаговых электроприводов, перемешающих гайки до .тех пор, пока измерительные коромысла не займут исходное (нулевое) положение, а также ведут подсчет числа тактовых импульсов г) /( и соответственно, для каждого из весоизмерительных узлов. Количество импульсов Пх, и ,, поданных в электроприводы до получения положения равновесия измерительных коромысел 5 являются мерами соответствующих уравновешивающих моментов и опорнь1х реакций ftx| и , V f 7.2. где It и KQ - масштабные коэффициенты, определяемые весом и грузов-гаек и длинойД,дб2одного шага привода 8, причем Для симметричных (одинаковых) весоизмерительных узлов К и Ко равны между собой.V
При циклической подаче команд с выхода счетно-решающего блока 35 на релейно-исполнительйый узел 28 последний включает в работу механизм циклического арретирования, который последовательно, например, 3-5 раз поднимает и опускает рамки 2, удерживая их в разарретированном положении заданное время При этом за счет небольших встряхиваний всех коромысел и разгрузочных рычагов из-за наличия сил сухого трения образуются вариации Л А Qj в измеренных значениях опорных реакций Q/t ftrj.. За периоды времени Т j (время разарретирования) электроприводы отрабатывают появившиеся вариации AR:,- и ДЙ( а также вызываемые ими соответствуюшие рабалансы измерительных коромысел 5, приводя последние в исходные положения равновесия. Поскольку за время арретирования Гдрр электропривод отключается, то полученные значения вариаций А R .- и & R. равны. : . (ь)
, (7)
где Л П и д п,2 - количества тактовых импульсов, поданных в приводы для отработки вариаций и дйг опорных реакций, причем числа дп И4П|2 1 имеют положительные или отрицательные значения в зависимости от направления вращения приводов.
Блоки усреднения 33 и 34 производят усреднение значений вариаций ДК и дРп сложение их с результатами измерения опорных реакций R и R и ввод полученных значенийЯ и г.в счетно-решающий блок 35
«,,5)КП,„;(9)
ЧсгV5 -4VT)«.acT.«)
где дополнительно N - число разарретирований и измерений вариаций R-и лЯя-в одной серии, N 7/ 3 ;
SRr - алгебраические суммы тактовых импульсов при отработке и &Rrj . Выходные значения Я и Qn опорных реакций из блоков 33 и 34 поступают в блок 35, который, согласно алгоритмам уравнений (I) - (3) производит подсчет значений координаты X, а также массы
.щ
-Ь -bklllCTL-L ..(
х
« 4n,5 bi±Aniil i I 1 VV Г; ii
N
M.4.(..а
И
Градуировка устройства -ведется посредством установки на раму 17 изделия с заданным положением центра тяжести и с известной массой.
Так как в устройстве применен механизм циклического арретирования, а весоизмерительные узлы содержат систему коромысел и уравновешивающий электропривод, то при работе устройства достигается существенное повышение точности, быстродействия, а также расширение диапазона измерений.
Формула изобретенкя
Устройство для определения центра тяжести изделий, содержащее основание, установленные на нем два весоизмерительные узла, и кинематически связанную с узлами грузоприемную раму для изделия, отличающееся тем, что, с целью повышения точности и быстродействия, оно снабжено механизмом циклического арретирования, вьшолнекным в виде двух пневмогидравлических цилиндров с поршнями и штоками, а каждый весоизмерительный узел выполнен в виде рамки, кинематически связанной.с одним из штоков с
возможностью ее перемешения в вертикальном направлении, установленных на основании двух промежуточных коромысел, взаимодействующих с рамкой, измерительного коромысла и двух разгрузочных рычагов, взаимодействующих между собой и, соответственно, с измерительным коромыслом и обоими промежуточными коромыслами, и закрепленного на измерительном коромысле щагового электропривода с ходовым винтом и гайкой.
Источники информации,
принятые во внимание при зкспертизе
1977 (прототип). ,Д5 F Ч .Ж
-эг
Si
Иг
I
35 1-Л IA ,|d to . Хзр/
