(54) ПРИВОД МАНИПУЛЯТОРА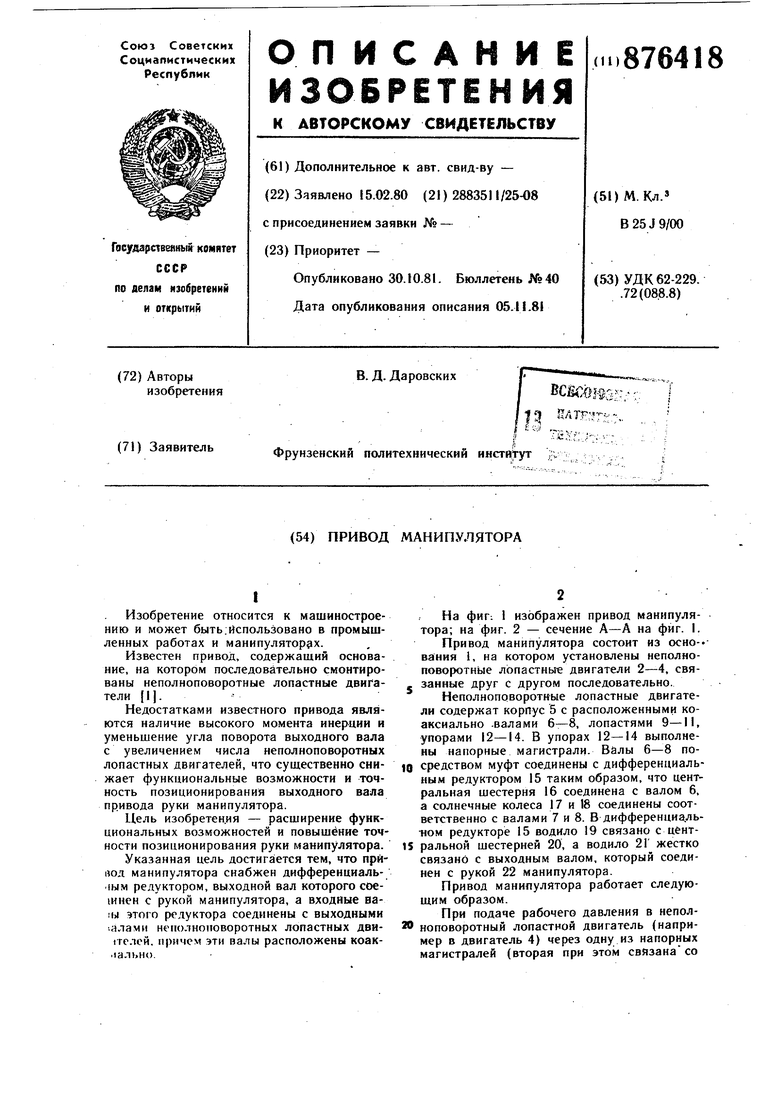
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрообъемный ходоуменьшитель самоходной машины | 1985 |
|
SU1299844A1 |
| Манипулятор | 1988 |
|
SU1602660A1 |
| Рука манипулятора | 1980 |
|
SU908587A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Манипулятор | 1982 |
|
SU1077782A1 |
| Дифференциальный раздаточный редуктор трансмиссии траншейного экскаватора | 1978 |
|
SU700607A1 |
| Манипулятор | 1987 |
|
SU1465299A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| ВЕТРОЭЛЕКТРИЧЕСКИЙ АГРЕГАТ | 1990 |
|
RU2015411C1 |
I
Изобретение относится к машиностроению и может быть;использовано в промышленных работах и манипуляторах.
Известен привод, содержащий основание, на котором последовательно смонтированы неполноповоротные лопастные двигатели I .
Недостатками известного привода являются наличие высокого момента инерции и уменьшение угла поворота выходного вала с увеличением числа неполноповоротных лопастных двигателей, что существенно снижает функциональные возможности и точность позиционирования выходного вала привода руки манипулятора.
Цель изобретения - расширение функциональных возможностей и повышение точности позиционирования руки манипулятора.
Указанная цель достигается тем, что прйиод манипулятора снабжен дифференциаль1ЫМ редуктором, выходной вал которого соешнен с рукой манипулятора, а входные ва1Ы этого редуктора соединены с выходными алами неполноповоротных лопастных дви1телей, причем эти валы расположены коакla.ibHo.
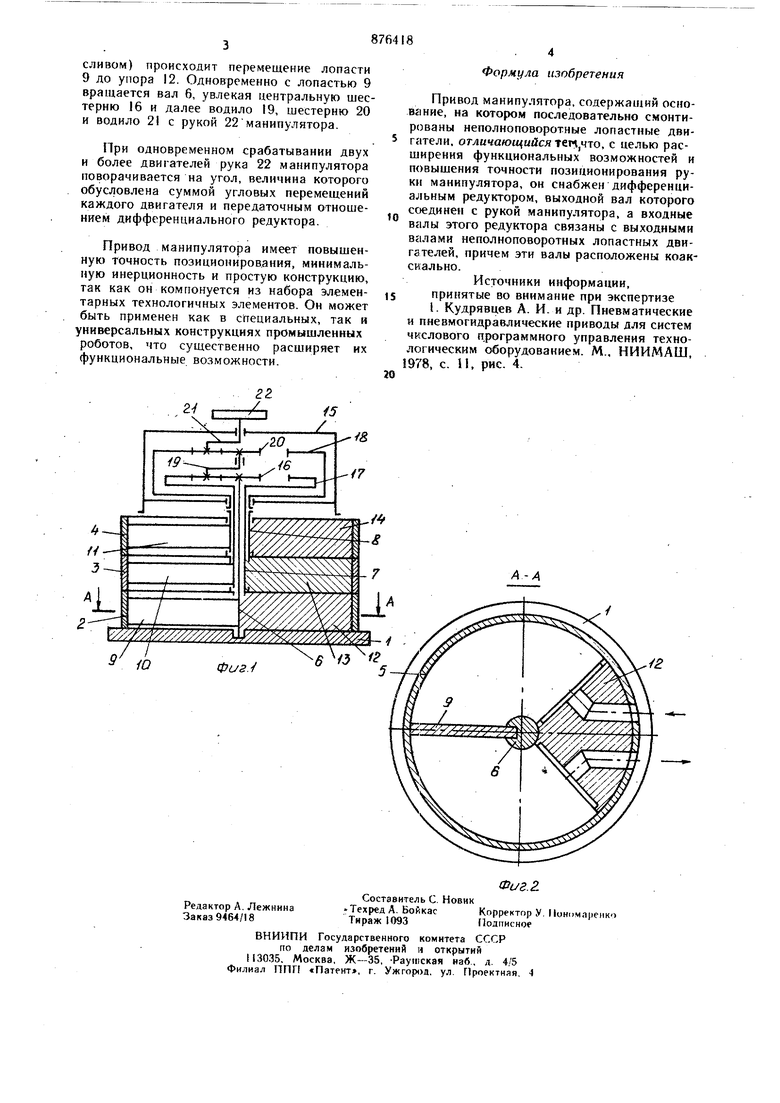
На фиг: 1 изображен привод манипулятора; на фиг. 2 - сечение А-А на фиг. I.
Привод манипулятора состоит из осно-. вания I, на котором установлены неполноповоротные лопастные двигатели 2-4, связанные друг с другом последовательно.
Неполноповоротные лопастные двигатели содержат корпус 5 с расположенными коаксиально .валами 6-8, лопастями 9-II, упорами 12-14. В упорах 12-14 выполнены напорные магистрали. Валы 6-8 посредством муфт соединены с дифференциальным редуктором 15 таким образом, что центральная шестерня 16 соединена с валом 6, а солнечные колеса 17 и 18 соединены соответственно с валами 7 и 8. В дифференциальном редукторе 15 водило 19 связано с центis ральной шестерней 20, а водило 21 жестко связано с выходным валом, который соединен с рукой 22 манипулятора.
Привод манипулятора работает следующим образом.
При подаче рабочего давления в неполЯ ноповоротный лопастной двигатель (например в двигатель 4) через одну из напорных магистралей (вторая при этом связана со
сливом) происходит перемещение лопасти 9 до упора 12. Одновременно с лопастью 9 вращается вал 6, увлекая центральную щестерню 16 и далее водило 19, щестерню 20 и водило 21 с рукой 22манипулятора.
При одновременном срабатывании двух и более двигателей рука 22 манипулятора поворачивается на угол, величина которого обусловлена суммой угловых перемещений каждого двигателя и передаточным отношением дифференциального редуктора.
Привод манипулятора имеет повыщенную точность позиционирования, минимальную инерционность и простую конструкцию, так как он компонуется из набора элементарных технологичных элементов. Он может быть применен как в специальных, так и универсальных конструкциях промышленных роботов, что существенно расширяет их функциональные возможности.
Формула изобретения
Привод манипулятора, содержащий основание, на котором последовательно смонтированы неполноповоротные лопастные двигатели, отличающийся , с целью расщирения функциональных возможностей и повыщения точности позиционирования руки манипулятора, он снабжен дифференциальным редуктором, выходной вал которого соединен с рукой манипулятора, а входные вялы этого редуктора связаны с выходными валами неполноповоротных лопастных двигателей, причем эти валы расположены коаксиально.
Источники информации,
принятые во внимание при экспертизе
I. Кудрявцев А. И- и др. Пневматические и пневмогидравлические приводы для систем числового программного управления технологическим оборудованием. М., НИИМАШ, 1978, с. И. рис. 4.
