О5
;о со
Изобретение относится к машиностроению, а именно к сенсорным устройствам для очувствления роботов.
Целью изобретения является упрощение конструкции.
На фиг. 1 изображен тактильный сенсор, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Тактильный сенсор робота содержит два слоя цилиндрических упругих балло- нов I и 2, заполненных рабочей средой. Баллоны в каждом слое установлены параллельно друг к другу с касанием по боковой поверхности. При этом баллоны 2 нижнего слоя закреплены на очувствляемой рабочей поверхности 3 схвата робота, а оси баллонов 2 перпенликулярны осям баллонов 1 верхнего слоя. Торцы баллонов снабжены подвижными электрическими контактами 4, напротив которых установлены металлические пластины 5 и б, образующие общую шину. Резисторы 7 и 8 образуют две группы, в которых резисторы соединены последовательно, причем выводы резисторов одной группы соединены с соответствующими контактами 4 баллонов верхнего слоя, а выводы резисторов другой группы - с соответствующими контактами 4 баллонов нижнего слоя. Сумма номиналов электрических сопротивлений резисторов одной группы меньще номинала электрического сопротивления каждого из резисторов другой группы. Контакты 4 крайних баллонов каждого слоя подключены к омметру 9 и к блоку управления роботом (не показан).
Тактильный сенсор работает следующим образом.
В исходном состоянии цепь омметра 9 разомкнута. При нажатии на любой бал
лон верхнего слоя, например в точке Р, усилие нажатия передается рабочей среде этого баллона, а чер ез точки соприкосновения усилие передается рабочей среде соответствующего баллона нижнего слоя. Под давлением рабочей среды контакты 4 указанных баллонов выдвигаются и замыкаются на общую шину, образуя замкнутую электрическую цепь. Омметром замеряется сопротивление цепи и по этому сопротивлению определяются координаты точки, в которой было приложено усилие, а в блоке управления формируется управляющий сигнал.
Формула изобретения
Тактильный сенсор робота, содержащий два слоя контактирующих между собой цилиндрических упругих баллонов полости которых заполнены рабочей средой, при этом в каждом слое баллоны расположены параллельно друг другу и под углом к баллонам другого слоя, причем каждый из баллонов связан с из.мерительным устройством, отличающийся тем, что, с целью упрощения, измерительное устройство выполнено в виде двух групп последовательно соединенных резисторов и электроизмерительного прибора, один вывод которого соединен с соответствующим крайним резистором одной группы, а другой - с соответствующим крайним резистором другой группы, причем торцы, баллонов каждого слоя снабжены контактами, соединенными с выводами резисторов соответствующей группы и имеющими возможность взаимодействия с дополнительно введенной общей шиной, при этом сумма номиналов электрических сопротивлений резисторов одной группы меньше номинала электрического сопротивления каждого из резисторов другой группы.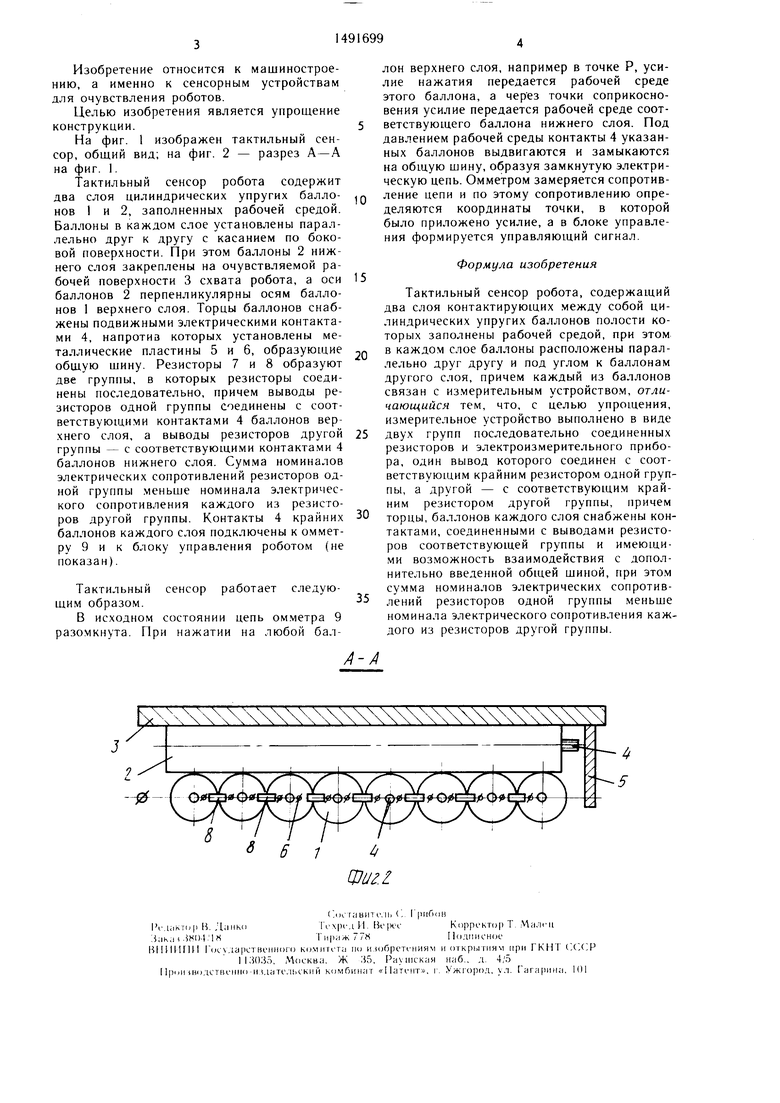
Изобретение относится к области машиностроения, а именно к сенсорным устройствам очувствления промышленных роботов. Целью изобретения является упрощение конструкции. Для этого измерительное устройство сенсора выполнено в виде двух групп последовательно соединенных резисторов 7 и 8. Каждая группа резисторов расположена напротив соответствующего слоя баллонов 1 и 2. При этом баллоны заполнены рабочей средой и расположены в каждом слое параллельно друг другу и под углом к баллонам другого слоя. Торцы баллонов снабжены подвижными контактами 4, соединенными с соответствующими выводами резисторов. Сумма номиналов электрических сопротивлений резисторов одной группы меньше номинала электрического сопротивления каждого из резисторов другой группы. При нажатии на один из баллонов верхнего слоя в какой-либо точке усилие передается рабочей среде этого баллона и через точки соприкосновения рабочей среде соответствующего баллона нижнего слоя. Контакты этих баллонов выдвигаются и замыкаются на общую шину. Омметром 9 определяется величина сопротивления образованной цепи. По этому сопротивлению определяют координаты точки, к которой было приложено усилие. 2 ил.
К N
| Матричный тактильный датчик | 1986 |
|
SU1388282A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
