Изобретение относится к робототехнике, а именно к сенсорным устройствам для очувствления промышленных роботов.
Целью изобретения является упрощение конструкции, за счет сокращения числа чувствительных элементов и измерительных приборов.
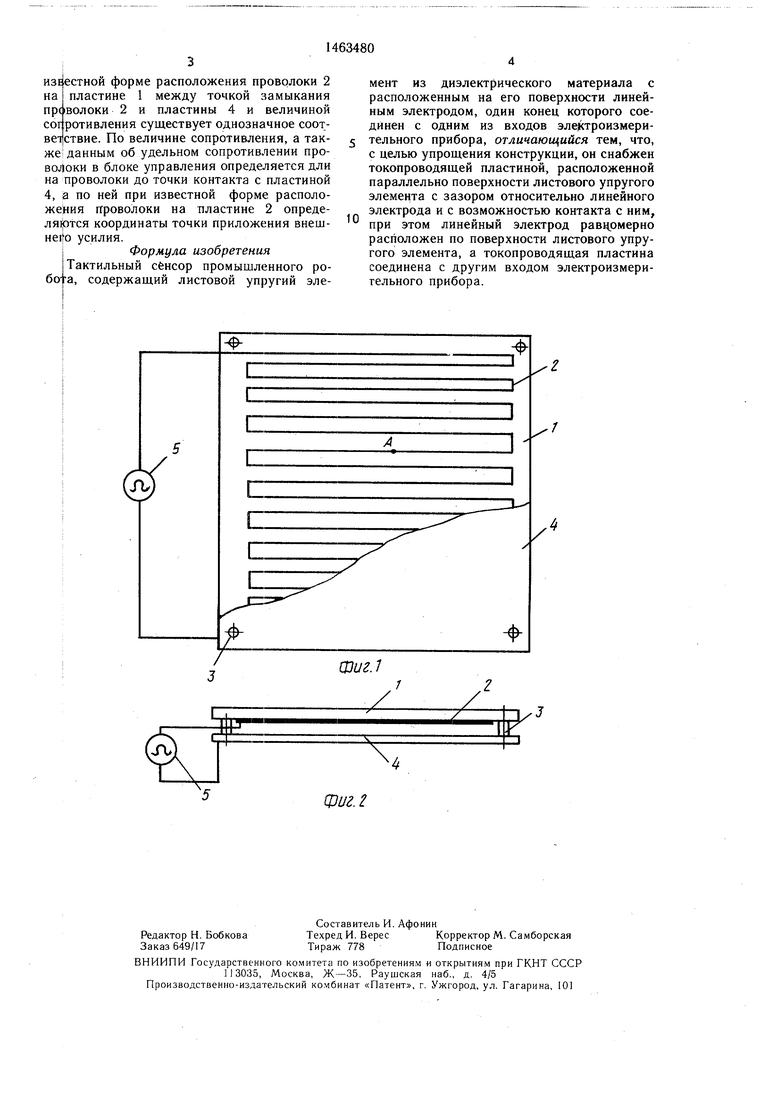
На фиг. 1 показан сенсор, общий вид; на фиг. 2 - то же, вид сбоку.
Тактильный сенсор промышленного робота состоит из листового упругого элемента (пластины) 1 из диэлектрического материала, например резины, на поверхности которого закреплен линейный электрод, выполненный, например, в виде проволоки 2. Последняя уложена в параллельные ряды с зазором между рядами на поверхности пластины 1. По краям пластины 1 установлены держатели 3, на которых установлена параллельно поверхности пластины 1 с зазором относительно проволоки 2 токопроводящая пластина 4. Один из концов проволоки 2 соединен с первым входом электроизмерительного прибора (например, омметра) 5, второй вход которого соединен с токопроводящей пластиной 4. Выход омметра 5 может быть подключен к блоку управления робота. Проволока 2 равномерно расположена по поверхности пластины 1 и может иметь форму, например, спирали и т.д.
Тактильный сенсор работает следующим образом.
В исходном состоянии цепь омметра 5 разомкнута. При нажатии, например, в точке А участок проволоки одного из рядов, соответствующий точке приложения усилия, соприкасается с пластиной 4. В результате цепь омметра 5 замыкается и данные об электрическом сопротивлении цепи поступают в блок управления роботом. При
Од
СО
iu
00
изЕСстной форме расположения проволоки 2 на пластине 1 между точкой замыкания пр(1волоки 2 и пластины 4 и величиной сог ротивления существует однозначное соответствие. По величине сопротивления, а также данным об удельном сопротивлении про- во4оки в блоке управления определяется дли на проволоки до точки контакта с пластиной 4, а по ней при известной форме расположения проволоки на пластине 2 опреде- ляртся координаты точки приложения внеш- Heifo усилия.
Формула изобретения Тактильный сенсор промышленного робота, содержащий листовой упругий эле
мент из диэлектрического материала с расположенным на его поверхности линейным электродом, один конец которого соединен с одним из входов эле|ктроизмери- тельного прибора, отличающийся тем, что, с целью упрощения конструкции, он снабжен токопроводящей пластиной, расположенной параллельно поверхности листового упругого элемента с зазором относительно линейного электрода и с возможностью контакта с ним, при этом линейный электрод равцрмерно расположен по поверхности листового упругого элемента, а токопроводящая пластина соединена с другим входом электроизмерительного прибора.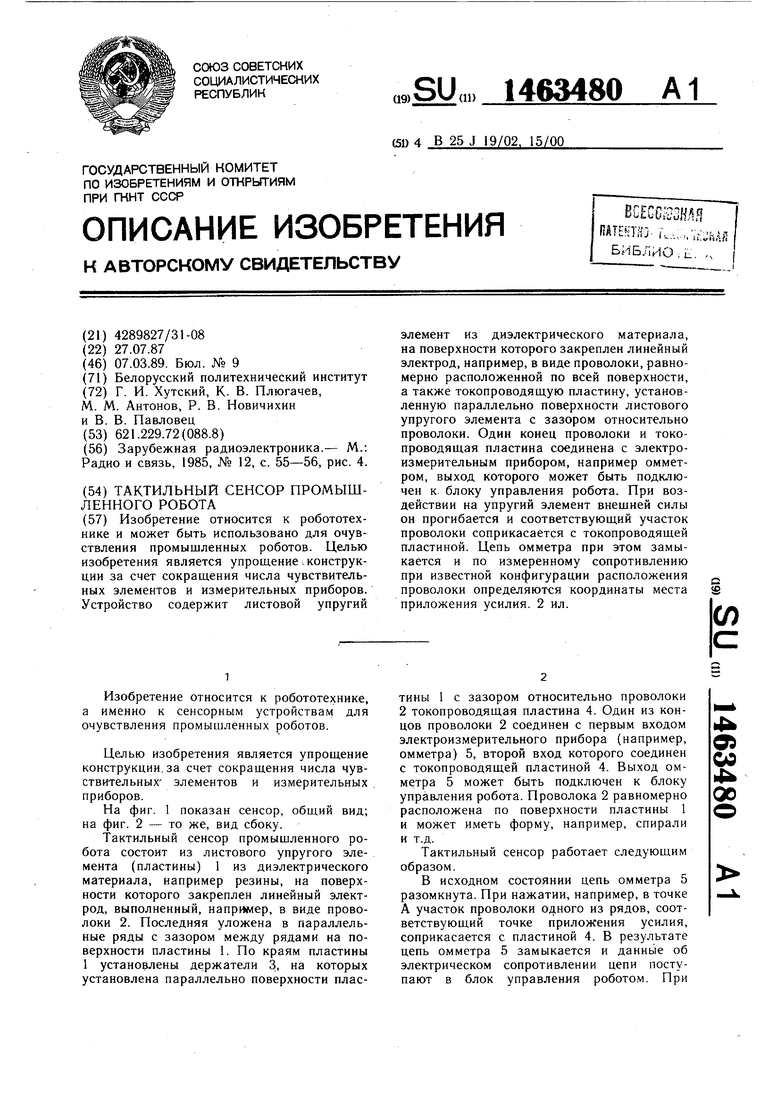
| название | год | авторы | номер документа |
|---|---|---|---|
| Тактильный сенсор робота | 1987 |
|
SU1491699A1 |
| Тактильный сенсор промышленного робота | 1986 |
|
SU1371902A2 |
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ ПОЛУПРОВОДНИКОВЫХ РЕЖУЩИХ КЕРАМИЧЕСКИХ ПЛАСТИН | 2020 |
|
RU2729169C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| Датчик силы | 1986 |
|
SU1435966A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Датчик влажности | 2018 |
|
RU2672814C1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
Изобретение относится к робототехнике и может быть использовано для очувствления промышленных роботов. Целью изобретения является упрощение.конструкции за счет сокращения числа чувствительных элементов и измерительных приборов. Устройство содержит листовой упругий элемент из диэлектрического материала, на поверхности которого закреплен линейный электрод, например, в виде проволоки, равномерно расположенной по всей поверхности, а также токопроводящую пластину, установленную параллельно поверхности листового упругого элемента с зазором относительно проволоки. Один конец проволоки и токо- проводящая пластина соединена с электроизмерительным прибором, например омметром, выход которого может быть подключен к блоку управления робота. При воздействии на упругий элемент внешней силы он прогибается и соответствующий участок проволоки соприкасается с токопроводящей пластиной. Цепь омметра при этом замыкается и по измеренному сопротивлению при известной конфигурации расположения проволоки определяются координаты места приложения усилия. 2 ил. (О (Л
С
/
фиг.
/
/
/
| Зарубежная радиоэлектроника.- М.: Радио и связь, 1985, № 12, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
