Изобретение относится к электротехнике и может быть использовано для управления автономными инверторами, входящими в состав систем частотно-регулируемого электропривода переменного тока.
Цель изобретения - улучшение качества процесса регулирования выходного сигнала трехфазного инвертора за счет плавного перехода от одного поддиапазона регулирования к другому .
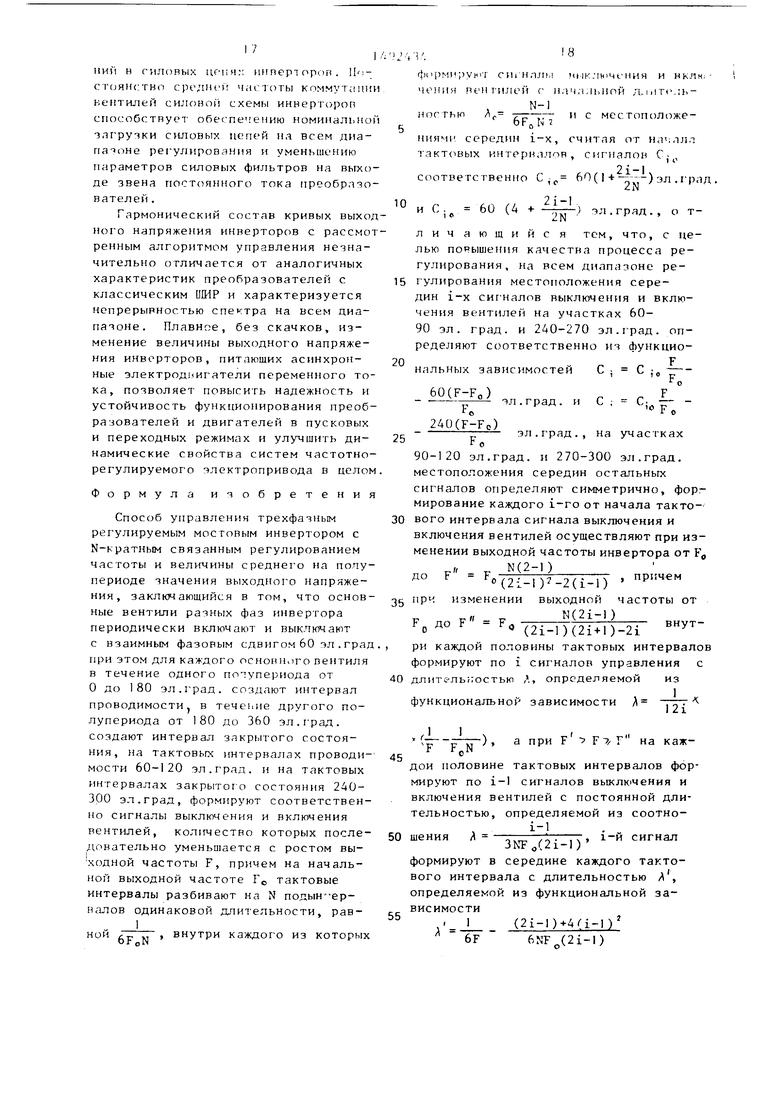
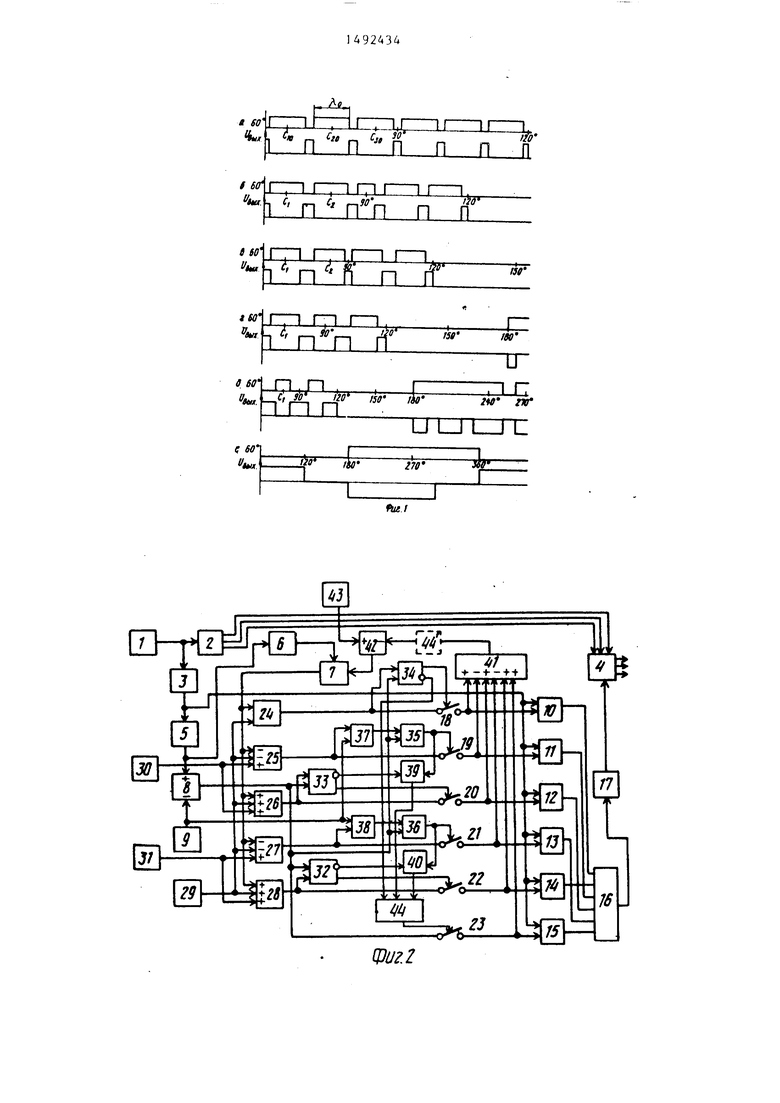
На фиг. 1 приведены временные диаграммы применительно к варианту шестикратного регулирования частоты и величины выходного напряжения инвертора (N 6); на фиг. 2 - функциональная схема устройства; на фиг. 3 - временные диаграммы работы
92434
соответственно 95, 1 05 и 1 1 5эл .град. и 275, 285 и 295 эл.град.
Увеличение выходной частоты ин- - вертора сопровождается пропорциональным уменьшением протяженности тактовых интервалов. Абсоютные значения временных интервалов между центрами управляющих сигналов на 10 половине каждого тактового интервала при управления согласно предлагаемому способу на всем диапазоне регулирования остаются неизменными, чем обеспечивается постоянство средней ч.астоты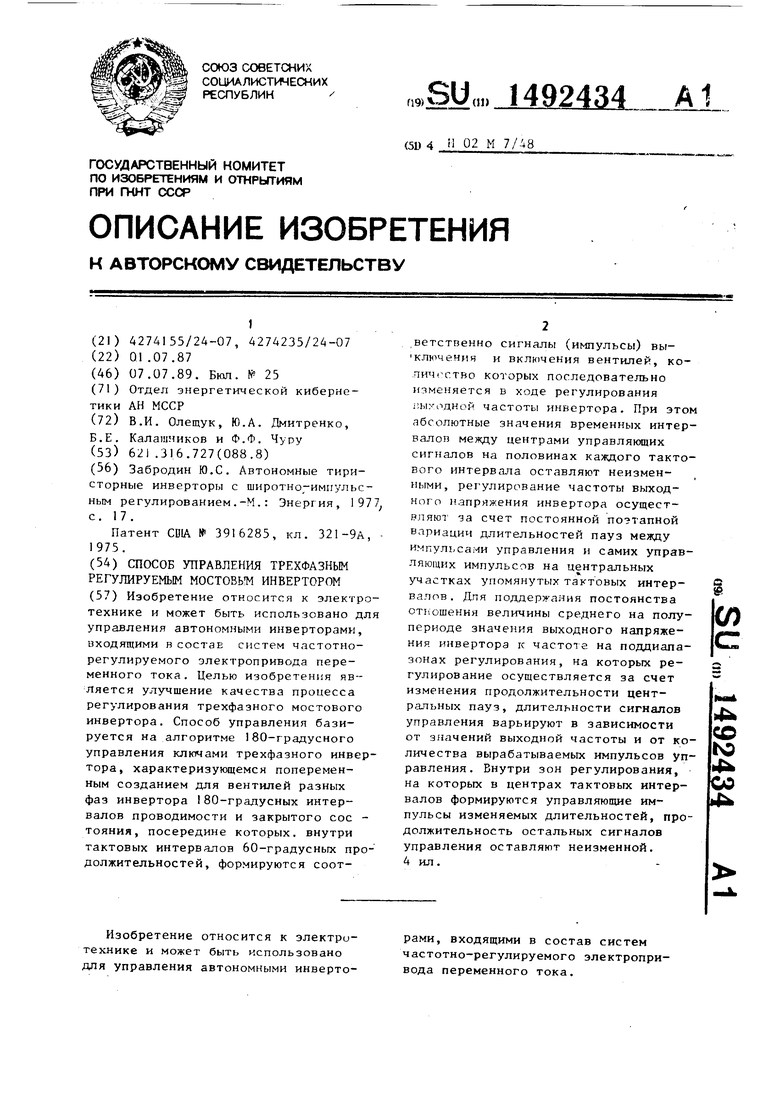
Изобретение относится к электротехнике и может быть использовано для управления автономными инверторами, входящими в состав систем частотно-регулируемого электропривода переменного тока. Целью изобретения является улучшение качества процесса регулирования трехфазного мостового инвертора. Способ управления базируется на алгоритме 180-градусного управления ключами трехфазного инвертора, характеризующемся попеременным созданием для вентилей разных фаз инвертора 180-градусных интервалов проводимости и закрытого состояния, посередине которых, внутри тактовых интервалов 60-градусных продолжительностей, формируются соответственно сигналы (импульсы) выключения и включения вентилей, количество которых последовательно изменяется в ходе регулирования выходной частоты инвертора. При этом абсолютные значения временных интервалов между центрами управляющих сигналов на половинах каждого тактового интервала оставляют неизменными, регулирование частоты выходного напряжения инвертора осуществляют за счет постоянной поэтапной вариации длительностей пауз между импульсами управления и самих управляющих импульсов на центральных участках упомянутых тактовых интервалов. Для поддержания постоянства отношения величины среднего на полупериоде значения выходного напряжения инвертора к частоте на поддиапазонах регулирования, на которых регулирование осуществляется за счет изменения продолжительности центральных пауз, длительности сигналов управления варьируют в зависимости от значений выходной частоты и от количества вырабатываемых импульсов управления. Внутри зон регулирования, на которых в центрах тактовых интервалов формируются управляющие импульсы изменяемых длительностей, продолжительность остальных сигналов управления оставляют неизменной. 4 ил.
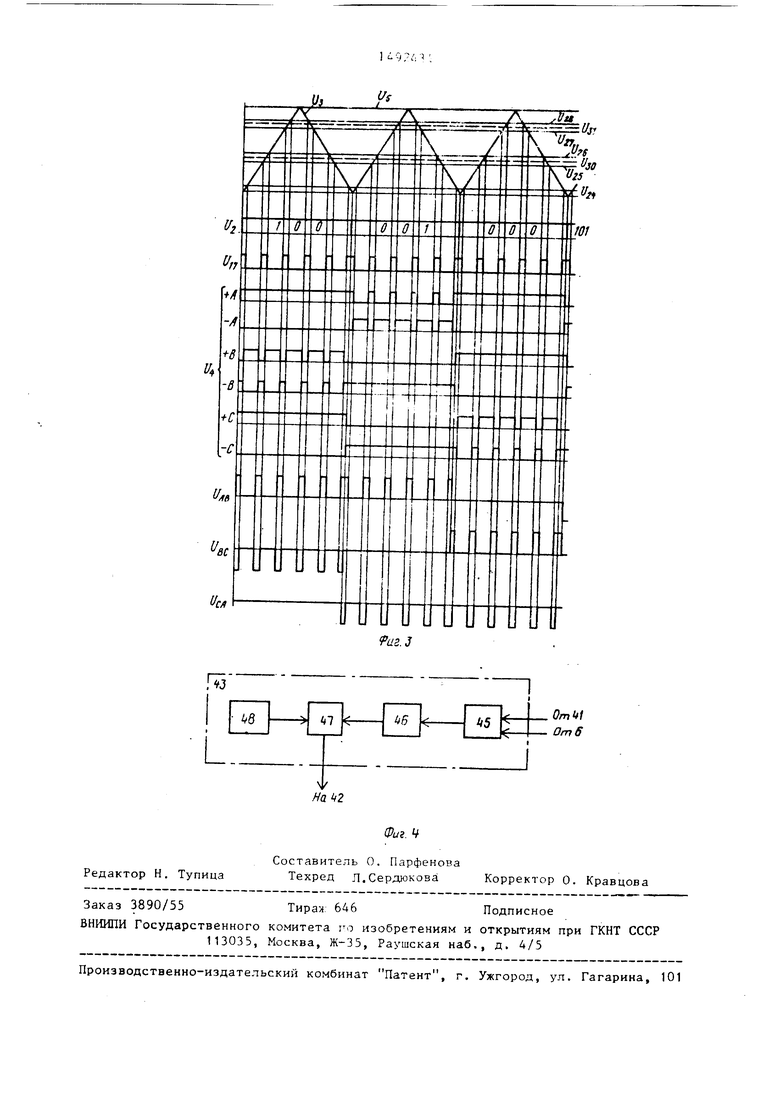
устройства; на фиг. 4 - источник опор-15 коммутации вентилей силовой схемы.
ного напряжения.
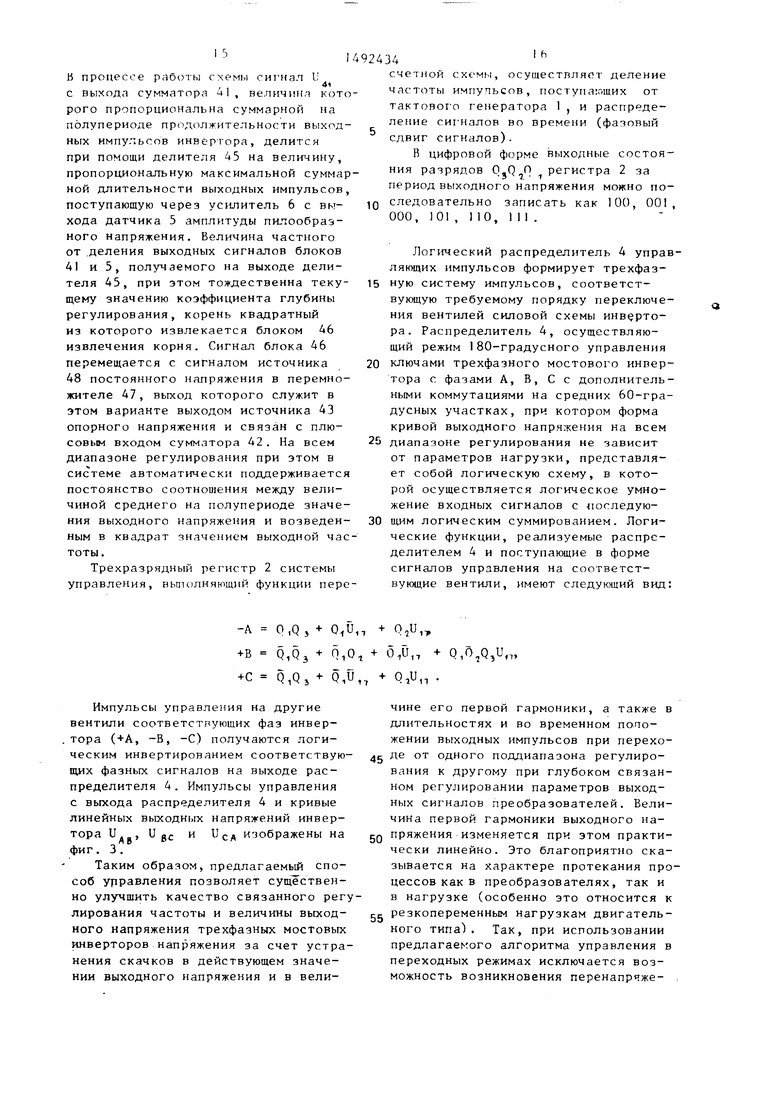
На верхней временной диаграмме (фиг, 1 а) и соответствующей начальной (минимальной) выходной частоте FP преобразователя показаны сигналы (импульсы) управления, поступающие на один из находящихся в проводящем состоянии вентилей катодной группы трехфазной мостовой схемы инвертора на тактовом интервале от 60 до 120 эл.град. и вызывающие на этом интервале его периодическое запирание. Ниже приведен соответствующий участок кривой линейного выходного напряжения инвертора. В данном случае тактовый интервал от 60 до 120 эл.град. разбит на 6 отрезков одинаковой длительности, равной 10 эл.град., внутри и посередине каждого из которых формируются управляющие импульсы протяженностью N-1
Д, 10N
8,33 эл.град. (в абединицах
N-I 6F,N
До определяется 2jg Р ) При этом
местоположения середин управляющих сигналов С . , С IJ, С JP на первой половине тактового интервала, вычис21-1
ляемые как С
60 (1 ч-),
-- - 2N ответственно равны С ,о 65 эл.град
lo
75 эл.град., С ,0 85 эл .град
На тактовом интервале от 240 до 300 эл.град. аналогичным образом вырабатьшаются сигналы на включение, местоположения центров включающих импульсов на первой половине тактового интервала при этом равны соответственно 245, 255 и 265 эл.град. ,На вторых половинах тактовых интервалов начальные местоположения середин импульсов управления равны
Относительные координаты местоположения середин i-x импульсов управления С,- на первых половинах тактовых интервалов в каждый момент времени , зависят при этом от текущего значения выходной частоты F преобразователя и определяются в угловых величи5
нах соответственно как
F 60(F-Fo)
.
С,
40
FO
240(F-Fo)
эл.град., и С ; С
на вторых половинах
0
5
0
5
тактовых интервалов сигналы формируют симметрично.
Регулирование частоты выходного напряжения инвертора при рассматриваемом алгоритме управления осуществляется за счет постоянной поэтапной вариации длительностей пауз между импульсами управления и самих управляющих импульсов на центральных участках тактовых интервалов. При этом для поддержания постоянства отношения величины выходного напряжения к частоте на поддиапазонах регулирования, на которых регулирование осуществляется за счет изменения продолжительности центральных пауз, длительности сигналов управления варьируют в зависимости от значений выходной частоты F и от количества формируемых сигналов i на каждой половине тактовых интервалов в соот0
ветствии с Напряжением 1
Л
121
5
(-- ) . На поддиапазонах регу- F
лирования, на кототорых в центрах тактовых интервалов формируются управляющие импульсы изменяемых длительностей, продолжительность остальных сигналов управления не зависит от текущих значений выходной частоты инвертора и определяется и:
соотношения
;,
i-l
При
ЗКГЛ21-1) этом на всем диапазоне регулировани описанный алгоритм подачи управляющих импульсов обеспечивает независимость формы кривой выходного па- пряжения от параметров нагрузки.
На первом поддиапазоне регулирования выходной частоты F инвертора вверх от начального значения изменение частоты (длительности периода производят путем изменения продолжительности центральных на тактовых интервалах пауз с одновременным изменением (уменьшением) длительностей сигналов управления в соответствии с зависимостью А 1 . 1 J 1
J(L. F,N
i,J..
36 V бР/
Ука3NF.,(2i-l)
45F.
/ О
шем повышении частоты . N(2i-l)
до
значения
занныи процесс продолжается вплоть до момента достижения выходной частотой инвертора значения F
N(2i-l)30
° о (2i-l)(2i+l) -2i 29 о Р котором продолжительность центральной паузы принимает нулевое значени
Дпительность Д первых двух на половине тактовых интервалов импульсов управления в отмеченный момент времени принимает значение Л
i-l 1
и при дальнео (21-1)2-2(1-1) 6(2-3-1)
30 21
оста 0(2-3-1)-2 (3-1) ется неизменной,
В середине тактовых интервалов на этом поддиапазоне регулирования формируется третий по счету управляющий импульс, продолжительность которого плавно изменяется при увеличении выходной частоты от величины, равной двойной длительности остальных сигналов управления, до нулевого значения и момента достижения выходной частотой величины F . Отмеченный поддиапазон управления иллюстрируется временньми диаграммами, приведенными на фиг. 1б.
На следующем подынтервале управления, характеризующемся налич 1ем паузы регулируемой длительности в серединах тактовых интервалов, продолжительности А оставшихся внутри тактовых интервалов четырех импуль
2) изменяются в 1 I
-)
iTIV
L fJL
24 Т выходной
-) вплоть до достижения
6F
частотой преобразователя
N(2i-l)
0
значения F о (2i-l) (2iM )-2i 18
гг FJJ , при котором центральная пауза уменьшается до нуля. Этому этапу регулирования соответствуют вре5 менные диаграммы сигналов управления и выходного напряжения преобразователя, приведенные на фиг. 1в.
На фиг. 1г представлены временные диаграммы, иллюстрирующие процесс
0 регулирования выходного сигнала инвертора на следующем этапе, на котором внутри тактовых интервалов формируется по три управляющих импульса (i 2) и регулирование выходной
5 частоты осуществляется за счет изменения продолжительности центрального импульса управления при неизменной длительности остальных импульсов, i-l I
0
равной
Д
3NF,,(2i-l)
54F,
Верх
няя граница отмеченного этапа регулирования фиксируется в момент достижения выходной частотой инвертора значения
. N(2i-l) JS. ,
o(2i-l) -2(i-l) 7 °
F;
Дальнейшее увеличение выходной частоты F сопровождается последовательным плавным уменьшением продол- жительностей двух формируемых на тактовых интервалах сигналов управления (i 1, фиг.1д), производимом в соответствии с зависимостью
L Д-.J р.Г 12 Т 6F/
J (1L
12i Ч
зплоть до уменьшения значения Л до нуля, достигаемого при f - - г- N(2i-l) ,
50 (2i-l)()-2i °- ответствует моменту достижения выходным напряжением своего максимального значения, и соответственно, достижению номинального значения
55 выходной частоты инвертора (этот момент отображен на временных диаграммах, приведенных на фиг. 1е) Кривая линейного выходного напряжения инвертора при формируется яэ последов;1те.-,иос ги выходных ям- пульсов с продолжител1)Ностями и 120 эл.град. Последующее увеличение выходной частоты преобрязователя осуществляется при неизменной (млкси мальной) величине выходного напряжения, что соответст }ует режиму постоянства мощности применительно к час- тотно-регулируемому асинхронному электроприводу переменного тока.
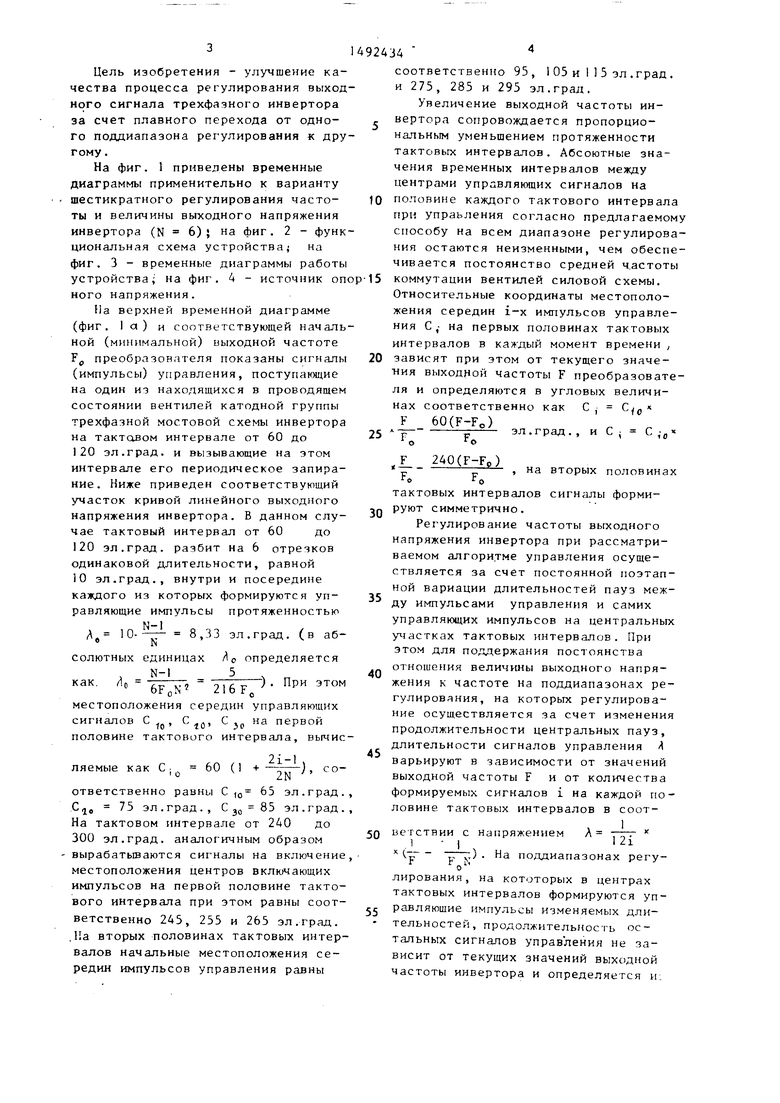
Функциональная схема устройства управления регулируемым инвертором, осуществляющего предлагаемый способ управления, приведена на фиг. 2. Для определенности принято, что число основных источников постоянного напряжения в схеме равно двум (п 2). При этом N 2п 1 , т .е . в данном случае устройство реализует связанное линейное регулирование частоты и величинь выходного напряжения инвертора в диапазоне пятикратного изменения частоты.
Генератор I тактовых иьшульсов , частота следования которых определяет выходную частоту инвертора, связан с регистром 2 и с генератором 3 развертывающего пилообразного на- пряжения. Регистр 2 связан своими выходами с соответствующими входами логического распределителя 4 управляющих импульсов. Выход генератора 3 соединен с датчиком 5 амплитуды пи- лообразного напряжения, сигнал с (выхода которого поступает через усилитель 6 на управляющую цепь усилителя 7,а также на плюсовой вход сумматора 8, минусовой вход которого по ключен к вспомогательному источнику 9 постоянного напряжения.
Выход генератора 3 пилообразного напряжения соединен также с первыми входами компараторов 10-15, включаю- пщх в свой состав выходные формирователи коротких однополярных импульсов, которые через элемент ИЛИ 16 связань с входом счетного триггера 17. Выход триггера 17 присоединен к основному входу распределителя 4. Вторые входы компараторов 10-15 соответственно через управляемые ключи 18-23 соединены с выходами сумматоров 24-28 и 8 . Плюсовые входы сум- маторов 24, 26 и 28 и минусовые входы сумматоров 25 и 27 связаны с источником 29 управляющего напряжения, другие плюсовые входы сумматоров 23 и 2Ь соединены с источником 30 nor-i (го напряжения. KpiiMe того, третий ПЛК1СОВОЙ вход сумматора 26 и второй минусопыГ вход сумматора 25 связаны с выходом усилителя 7. Другие плюсовые входы сумматоров 27 и 28 подключены к источнику 31. Третий плюсовой вход сумматора 28 и второй ми 1усовой вход блока 27 подключены к выходу усили1еля 7.
Выход сумматора 8 присоединен к первым Входам блоков 32-36 сравнения, вспомогательный источник 9 подключен к входам сумматоров 37 и 38. Вторые входы блоков 32 и 33 сравнения связаны соответственно с выходами сумматоров 28 и 26, а блоков 34, 35 и 36 - соответственно с выходами сумматоров 24, 37 и 38. Прямые выходы б. юков 32 и 33 сравнения соединены с управляющими цепями ключей 22 и 20, прямые выходы блоков 34, 35 и 36 связаны соответственно с управляющими цепями ключей 18, 19 и 21 , входы блоков 35 и 36 соединены также с входами элементов И 39 и 4и, на другие входы которых поступают сигналы с инверсных выходов блоков 33 и 32 сравнения. Выходы элементов И 40 и 39 присоединены через элемент ИЛИ 44 к управляющей цепи ключа 23. К вхду узла ИЛИ 44 подключен также инверсный выход блока 34 сравнения. Вторые входы компараторов 10, 12, 14 и 15 связаны с плюсовыми входами мно говходового сумматора 41 , минусовые входы которого присоединены к вторым входам компараторов 11 и 13. Выход сумматора 41 соединен с минусовым входом сумматора 42, на плюсовой вход которого приходит сигнал источника 43 постоянного напряжения. Выход сумматора 42 связан с входом усилителя 7, имеющего переменный коэффициент передачи.
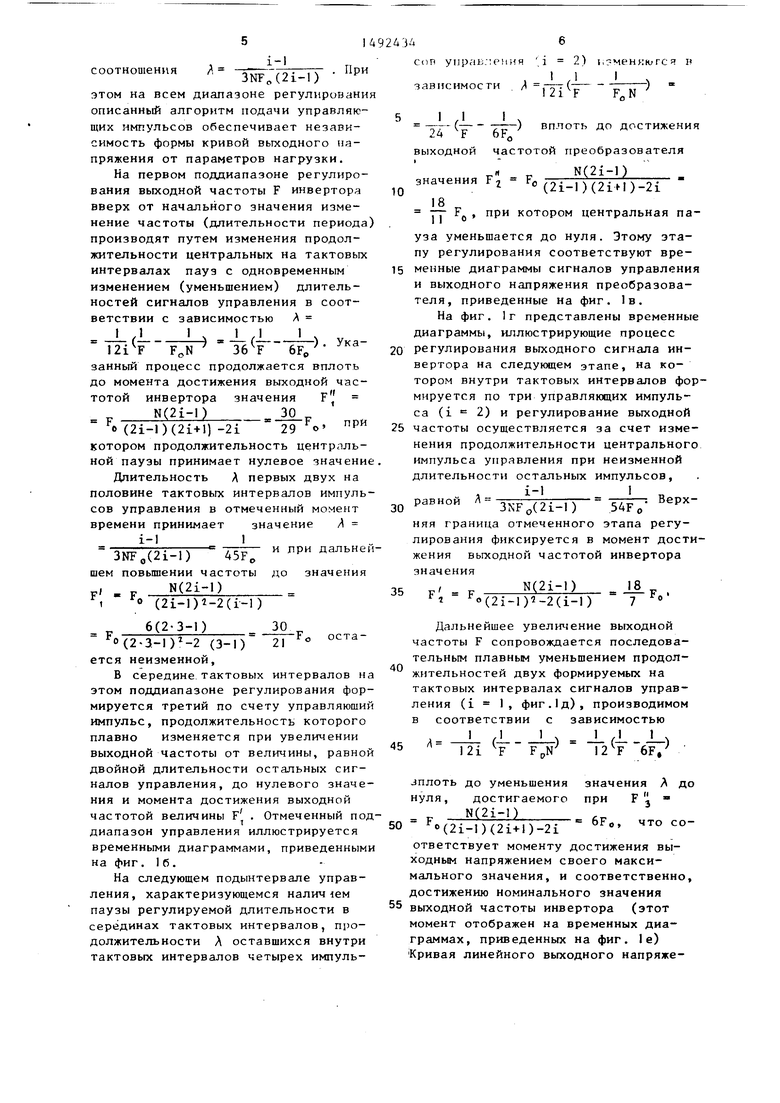
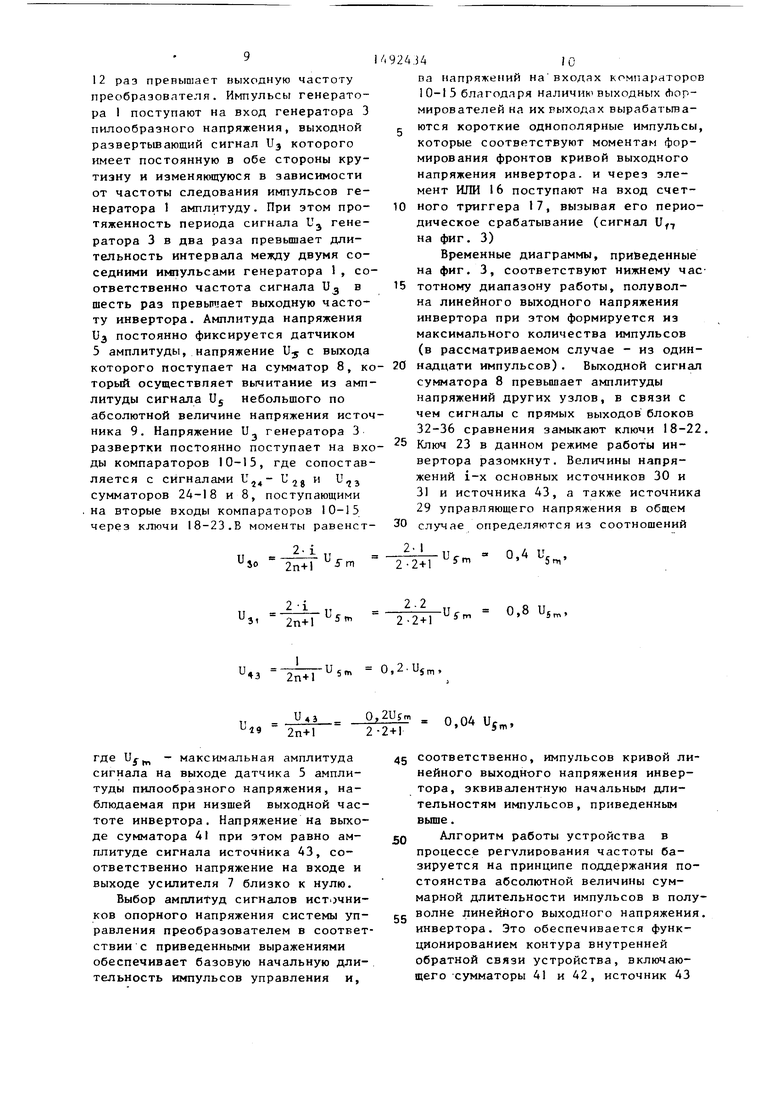
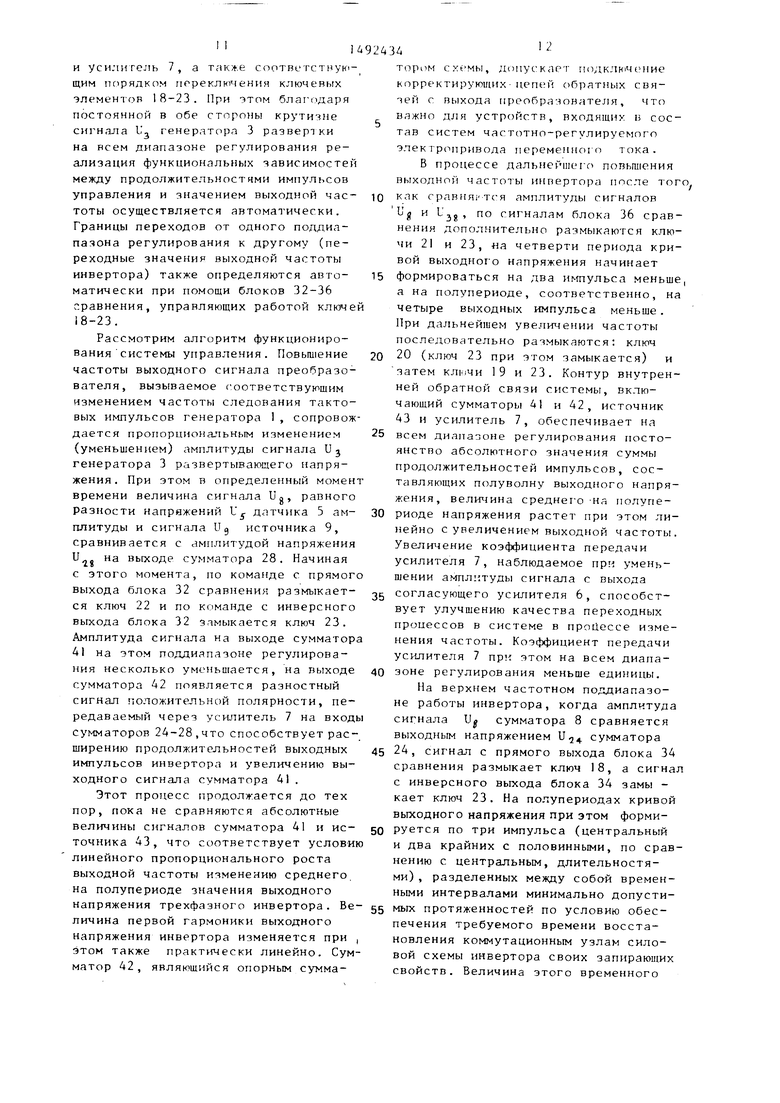
Временные диаграммы, поясняющие принцип работы устройства на полупериоде выходной частоты инвертора, изображены на фиг.З. Обозначения сигналов на временных диаграммах, приведенных на фиг. 3, соответствуют напряжениям на выходах блоков с аналогичными числовыми обозначениями, приведенными на фиг. 2. В основе работы схемы лежит вертикальный прин дап управления. Частота следования тактовых импульсов генератора 1 на всем диапазоне регулирования в
12 раз превышает выходную частоту преобразователя. Импульсы генератора 1 поступают на вход генератора 3 пилообразного напряжения, выходной развертьшающий сигнал Uj которого имеет постоянную в обе стороны крутизну и изменяющуюся в зависимости от частоты следования импульсов генератора 1 амплитуду. При этом протяженность периода сигнала Uj генератора 3 в два раза превышает длительность интервала между двумя соседними импульсами генератора 1, соответственно частота сигнала U в шесть раз превьпчает выходную частоту инвертора. Амплитуда напряжения УЗ постоянно фиксируется датчиком 5 амплитуды, напряжение Uj с выхода которого поступает на сумматор 8, ко торый осуществляет вычитание из амплитуды сигнала Vg небольшого по абсолютной величине напряжения источ ника 9. Напряжение U генератора 3 развертки постоянно поступает на вхо ды компараторов 10-15, где сопоставляется с сигналами U,, и U,, сумматоров 24-18 и 8, поступающими на вторые входы компараторов 10-15 через ключи 18-23.В моменты равенст
и
5т
2 -i 2n+l
и
5m
Чз
2n+l
-Uj 0,2.U5p,,
19
U43
2n+l
где ffn - максимальная амплитуда сигнала на выходе датчика 5 амплитуды пилообразного напряжения, наблюдаемая при низшей выходной частоте инвертора. Напряжение на выходе сумматора 41 при этом равно амплитуде сигнала источника 43, соответственно напряжение на входе и выходе усилителя 7 близко к нулю.
Выбор амплитуд сигналов источников опорного напряжения системы управления преобразователем в соответствии с приведенными выражениями обеспечивает базовую начальную длительность импульсов управления и.
ва напряжений на входах компараторов 10-15 благодаря наличик выходных t)op мирователей на их выходах вырабатьгааg ются короткие однополярные импульсы, которые соответствуют моментам формирования фронтов кривой выходного напряжения инвертора, и через элемент ИЛИ 16 поступают на вход счет10 ного триггера 17, вызывая его периодическое срабатывание (сигнал U, на фиг. 3)
Временные диаграммы, приведенные на фиг. 3, соответствуют нижнему час15 тотному диапазону работы, полуволна линейного выходного напряжения инвертора при этом формируется из максимального количества импульсов (в рассматриваемом случае - из один- 20 надцати импульсов). Выходной сигнал сумматора 8 превышает амплитуды напряжений других узлов, в связи с чем сигналы с прямых выходов блоков 32-36 сравнения замыкают ключи 18-22.
25 Ключ 23 в данном режиме работы инвертора разомкнут. Величины напряжений i-x основных источников 30 и 31 и источника 43, а также источника 29 управляющего напряжения в общем случае определяются из соотношений
30
и
fm - 0. Uj,
0,8 Us,
0, 2-2+1
0.04 Uj,
соответственно, импульсов кривой линейного выходного напряжения инвертора, эквивалентную начальным длительностям импульсов, приведенным Bbmie.
Алгоритм работы устройства в процессе регулирования частоты базируется на принципе поддержания постоянства абсолютной величины суммарной длительности импульсов в полуволне линейного выходного напряжения, инвертора. Это обеспечивается функционированием контура внутренней обратной связи устройства, включающего -сумматоры 41 и 42, источник 43
IIU
и усилитель 7, а также соответствук щим порядком пореклк1чения ключевых элементов 18-23 . При этом благодаря постоянной в обе стороны крутизне сигнала U. генератора 3 раэвер7ки на всем диапазоне регулирования реализация функциональных зависимостей между продолжительностнми импульсов управления и значением выходной частоты осуществляется автоматически. Границы переходов от одного поддиапазона регулирования к другому (переходные значения выходной частоты инвертора) также определяются автоматически при помощи блоков 32-36 сравнения, управляющих работой ключе 18-23.
Рассмотрим алгоритм функционирования системы управления. Повьш1ение частоты выходного сигнала преобразователя, вызываемое соответствующим изменением частоты следования тактовых импульсов генератора 1 , сопровождается пропорциональным изменением (уменьшением) амплитуды сигнала Uj генератора 3 развертывающего напряжения. При этом в определенный момен времени величина сигнала Ug, равного разности напряжений U датчика 5 амплитуды и сигнала Ug источника 9, сравнивается с амплитудой напряжения на выходе сумматора 28. Начиная с этого момента, по команде с прямог выхода блока 32 сравнения размыкается ключ 22 и по команде с инверсного выхода блока 32 замыкается ключ 23. Амплитуда сигн;1ла на выходе сумматор 41 на этом поддиапазоне регулирования несколько уменьшается, на выходе сумматора 42 появляется разностный сигнал положительной полярности, передаваемый через усилитель 7 на вход сумматоров 24-28,что способетвуетрас- щирению продолжительностей выходньгх импульсов инвертора и увеличению выходного сигнала сумматора 41.
Этот процесс продолжается до тех пор, пока не сравняются абсолютные величины сигналов сумматора 41 и источника 43, что соответствует услови линейного пропорционального роста выходной частоты изменению среднего На полупериоде значения выходного напряжения трехфазного инвертора. Величина первой гармоники выходного напряжения инвертора изменяется при этом также практически линейно. Сумматор 42, являющийся опорным сумма4
тором схемы, допускает подклкмение корректирующих - цепей обратных связей с выхода преобразователя, что важно для устройств, входящих в состав систем частотно-регулируемого электропривода переменного тока.
В процессе дальнеГмиего повьшюния выходной частоты инпертора после того
как сравня1 тся амплитуды сигналов Ug и L jj , по сигналам блока 36 сравнения дополнител1;Но размыкаются ключи 21 и 23, на четверти периода кривой выходного напряжения начинает
формироваться на два и myльca меньше, а на полупериоде, соответственно, на четыре выходных импульса меньше. При дальнейшем увеличении частоты последовательно размыкаются: ключ
20 (ключ 23 при этом замыкается) и затем ключи 19 и 23. Контур внутренней обратной связи системы, включающий сумматоры 41 и 42, источник 43 и усилитель 7, обеспечивает на
всем диапазоне регулирования постоянство абсолютного значения суммы продолжительностей импульсов, составляющих полуволну выходного напряжения, величина среднег о -на полупериоде напряжения растет при этом линейно с увеличением выходной частоты. Увеличение коэффициента передачи усилителя 7, наблюдаемое прг-; уменьшении амплитуды сигнала с выхода
согласующего усилителя 6, способствует улучшению качества переходных процессов в системе в процессе изменения частоты. Коэффициент передачи усилителя 7 при этом на всем диапазоне регулирования меньше единицы.
Па верхнем частотном поддиапазоне работы инвертора, когда амплитуда сигнала U сумматора В сравняется выходным напряжением V сумматора
24, сигнал с прямого выхода блока 34 сравнения размыкает ключ 18, а сигнал с инверсного выхода блока 34 замы - кает ключ 23. На полупериодах кривой выходного напряжения при этом формируется по три импульса (центральный и два крайних с половинными, по сравнению с центральным, длительностями) , разделенных между собой временными интервалами минимально допустимьгх протяженностей по условию обеспечения требуемого времени восстановления коммутационным узлам силовой схемы инвертора своих запирающих свойств. Величина этого временного
const), рассмотренному выше.
интерпплп для cxt M нл бып ркленс г- вующих тиристорах не преньппяе 100 МКС, обеспечивается соответствующим выбором амплитуды сигналя вспомогательного источника 9 и не оказывает заметного влияния на ход регулировочной характеристики преобразователя. Величина выходного напряжения инвертора на верхнем частотном диапазоне близка к максимальному значению и при дальнейшем повышении частоты остается на этом уров
Наряду с реализацией близкого к пропорциональному закону изменения величины напряжения от частоты
4
структура устройства может служить опорной для реализации других закон регулирования выходных параметров трехфазного инвертора, что достигается дополнительным включением между выходом сумматора 41 и входом сумматора 42 нелинейного блока 44 . Так, в качестве блока 44 может быть использован блок извлечения квадратного корня. В этом случае выходная частота преобразователя, задаваемая сигналом генератора 1 тактовых импульсов, поддерживается пропорциональной корню квадратному из величины среднего на полупериоде значения выходного напряжения, эквивалентного в данной схеме величине выходного сигнала сумматора 41. При этом на всем диапазоне регулирования
F
--- const , или, что идентично,
Vu
-- const. Этот закон регулирования соответствует квадрат1{чной зависимости момента нагрузки (асинхронного двигателя) от угловой скорости и квадратичной зависимости максимального момента идеализированного двигателя от напряжения и частоты и в ряде случаев является более экономичным (например, в случае регулирования вентиляторных нагрузок с пониженными значениями диапазона регулирования),
Выбор величины напряжения источников 29 и 43 при реализации э . ого закона регулирования осуществляе ся из соотношений
Us.
(2П+1)
и
79
и..
2п+1
С(м-ллсованио у с игн, U , и и. , нп Рлокои - 4 I и чч осуществляется соответствующим подбором внутренних napaNieTpoB блока 44 извлечения квадратного корня.
Если в качестве блока 44 использовать квадратор Сблок возведения н квадрат), то устройство управления позволяет реализовать закон регулирования нагрузки в соответствии
I
const. Дейстс соотношением
VF
внтельно, в этом случае изменение величины среднего на полупериоде значения выходного напряжения АЙН, определяемого сигналом, поступающим на плюсовой вход сумматора 42, осуществляется пропорционально корню квадратному от величины частоты
и
(-- const, или, что эквивалентно,
Ь ч
-- const; . Указанный закон регуVF
лирования может быть использован для экономичного регулирования нагрузок с постоянной мощностью.
Расчет опорных значений сигналов и U,gприменительно к последнему закону управления осуществляется в соответствии с соотношениями
и 5
и
19
2т1+
5
и
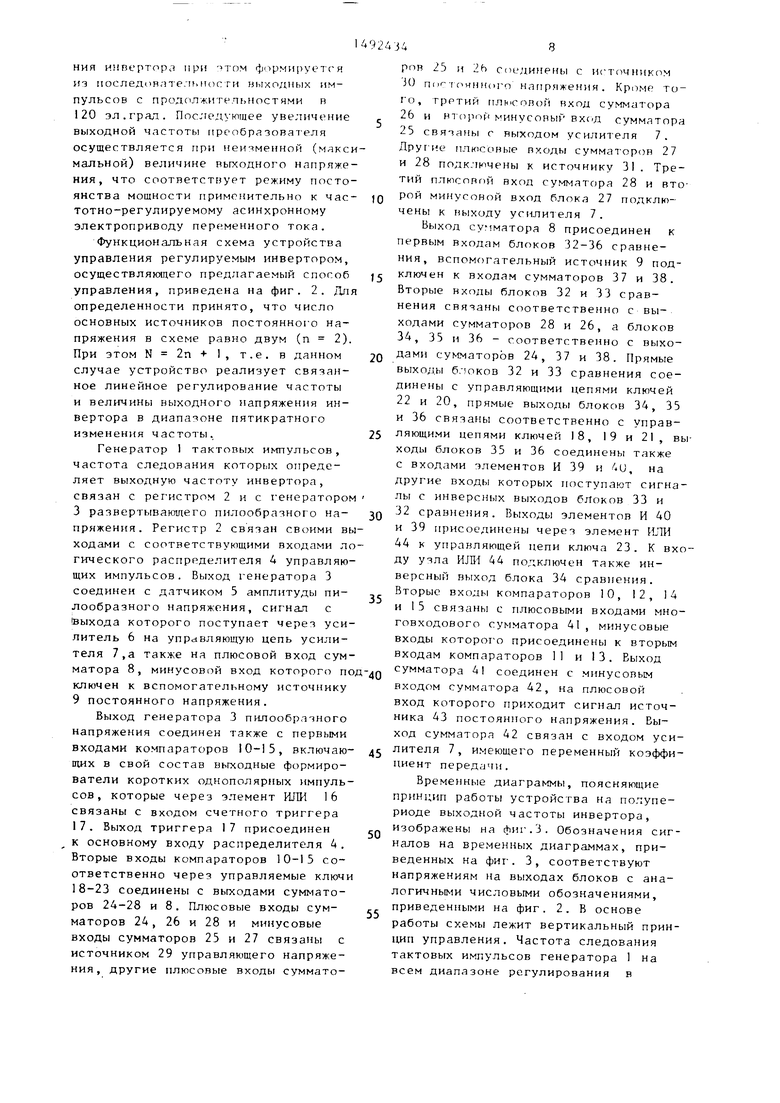
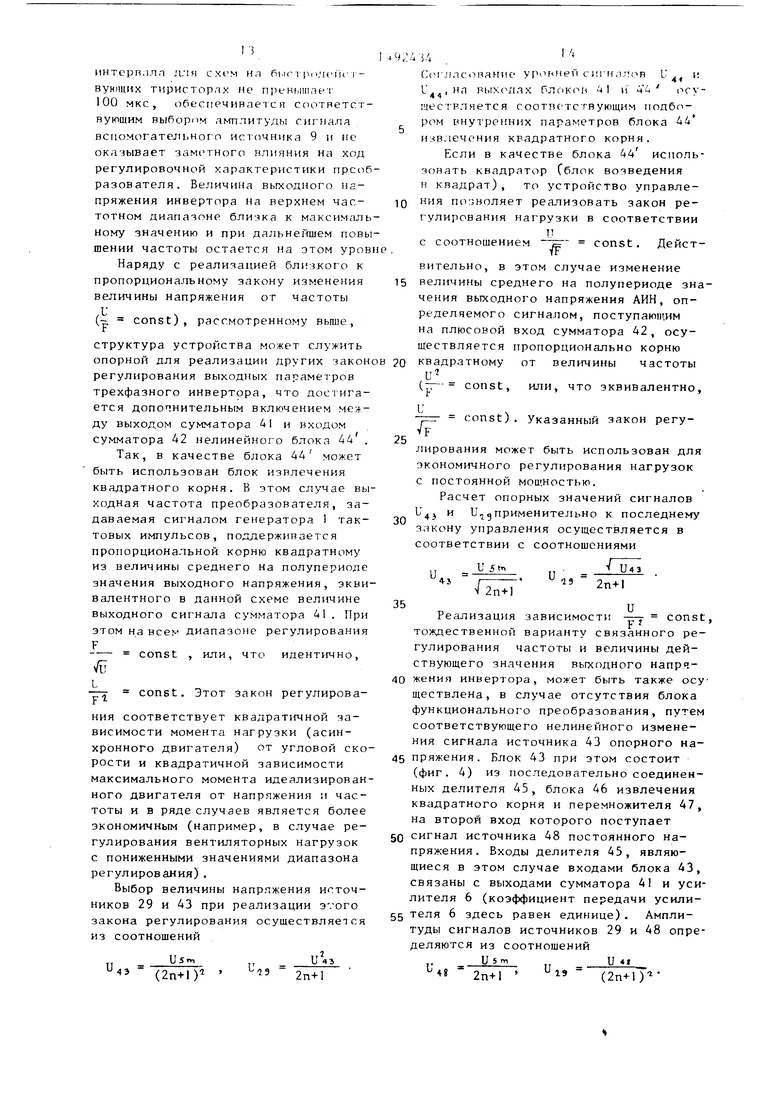
Реализация зависимости --j const, тождественной варианту связанного регулирования частоты и величины действующего значения выходного напря0 жения инвертора, может быть также осуществлена, в случае отсутствия блока функционального преобразования, путем соответствующего нелинейного изменения сигнала источника 43 опорного на5 пряжения. Блок 43 при этом состоит (фиг. 4) из последовательно соединенных делителя 45, блока 46 извлечения квадратного корня и перемножителя 47, на второй вход которого поступает
0 сигнал источника 48 постоянного напряжения. Входы делителя 45, являющиеся в этом случае входами блока 43, связаны с выходами сумматора 41 и усилителя 6 (коэффициент передачи усили5 теля 6 здесь равен единице). Амплитуды сигналов источников 29 и 48 определяются из соотношений
Usmи 4,
и I
и
48
2п+1
19
() процессе работы схемы сигнал U
41
С выхода сумматора ч1, величина которого пропорциональна суммарной на полупериоде прод(1лжительности выходных импульсов инвертора, делится при помощи делителя 45 на величину, пропорциональную максимальной суммарной длительности выходных имцульсов, поступающую через усилитель 6 с выхода датчика 5 амплитуды пилообразного напряжения. Величина частного от .деления выходных сигналов блоков А1 и 5, получаемого на выходе делителя 45, при этом тождественна текущему значению коэффициента глубины регулирования, корень квадратный из которого извлекается блоком 46 извлечения корня. Сигнал блока 46 перемещается с сигналом источника 48 постоянного напряжения в перемножителе 47, выход которого служит в этом варианте выходом источника 43 опорного напряжения и связан с плюсовым входом сумматора 42. На всем диапазоне регулирования при этом в системе автоматически поддерживается постоянство соотношения между величиной среднего на полупериоде значения выходного напряжения и возведенным в квадрат значением выходной частоты.
Трехразрядный регистр 2 системы управления, вьтолняющий функции пере-А 0,Q, + 0,0,, + Q,U, О,РЗ 0,0 + 6iU,, + 0,0.,Q,U,,,
С QiQj + Q,0, + Q,U,, .
Импульсы управления на другие вентили соответствующих фаз инвертора (+А, -В, -С) получаются логическим инвертированием соответствующих фазных сигналов на выходе распределителя 4 . Импульсы управления с выхода распределителя 4 и кривые линейных выходных напряжений инвертора и , и «с и изображены на
Л В
фиг. 3.
Таким образом, предлагаемый способ уу1равления позволяет сущЖствен- но улучшить качество связанного реглирования частоты и величины выходного напряжения трехфазных мостовых инверторов напряжения за счет устранения скачков в действующем значении выходного напряжения и в вели243А
счетной схемы, осуществляет деление частоты импульсов, поступающих от тактовог о генератора I , и распределение сиг налов во времени (фазовый сдвиг сигналов).
В цифровой форме выходные состояния разрядов QjQ,n регистра 2 за период выходного напряжения можно по- Q следовательно записать как 100, 001, 000, 101 , 1 10, 1 I I .
Логический распределитель 4 управляющих импульсов формирует трехфаз15 ную систему импульсов, соответствующую требуемому порядку переключения вентилей силовой схемы ра. Распределитель 4, осуществляющий режим 1 80-градусного управления
20 ключами трехфазного мостового инвертора с фазами А, В, С с дополнительными коммутациями на средних 60-градусных участках, при котором форма кривой выходного напряжения на всем
25 диапазоне регулирования не зависит от параметров нагрузки, представляет собой логическую схему, в которой осуществляется логическое умножение входных сигналов с последую30 пшм логическим суммированием. Логические функции, реализуемые распределителем 4 и поступакнцие в форме сигналов управления на соответствующие вентили, имеют следующий вид:
чине его первой гармоники, а также в длительностях и во временном положении выходных импульсов при перехоДб от одного поддиапазона регулирования к другому при глубоком связанном регулировании параметров выходных сигналов преобразователей. Величина первой гармоники выходного напряжения изменяется при этом практически линейно. Это благоприятно сказывается на характере протекания процессов как в преобразователях, так и в нагрузке (особенно это относится к
резкопеременным нагрузкам двигатель- ного типа). Так, при использовании предлагаемого алгоритма управления в переходных режимах исключается возможность возникновения перенапрчже I
НИМ в силовых nfiin:; ииперторов. CTcjHHcTBo средшч nacioTbi коммут;|ции вентилей силовой схемы инверторов способствует обеспечению номинальной злг ручки силовых цепей н.ч всем диа- рег улированмя и уменьшению параметров силовых фильтров на выходе звена постоянного тока преобразователей .
Гармонический состав кривых выходного напряжения инверторов с рассмотренным алгоритмом управления незначительно отличается от аналогичных характеристик преобразователей с классическим UMP и характеризуется непрерывностью спектра на всем диапазоне. Плавное, без скачков, изменение величины выходного напряжения инверторов, питающих асинхронные электрод1 игатели переменного тока, позволяет повысить надежность и устойчивость функционирования преобразователей и двигателей в пусковых и переходных режимах и улучшить динамические свойства систем частотно- регулируемого электропривода в целом
Формула изобретения
Способ управления трехфазным регулируемым мостовым инвертором с N-кратным связанным регулированием частоты и величины среднег о на полупериоде значения выходного напряжения, заключающийся в том, что основные вентили разных фаз инвертора периодически включают и выключают с взаимным фазовым сдвигом 60 эл . град при этом для каждого основного вентиля в течение одного птупериода от О до 180 эл.град. создают интервал проводимости, в течение другого полупериода от 180 до 360 эл.г рад. создают интервал закрытого состояния, на тактовых интервалах проводимости 60-120 эл.град. и на тактовых интервалах закрытого состояния 240- 300 эл.град, формируют соответственно сигналы выключения и включения вентилей, кол1гчество которых последовательно уменьшается с ростом вы- ходной частоты F, причем на начальной выходной частоте FC тактовые интервалы разбивают на N подын-ер- налов одинаковой длительности, рав1
ной ,--,., . внутри каждого из которых oFoN
,,,,
г})чрмн;)уц| Г сигнлл, Ml |к:1Н1чения и нклм; чения вен 1 иле 1 г начальной д.1||т ьN-1
постыл Af. и с местоположе- 6Р,Ы
НИЯМ1 середин i-x, считая от на1;алл тактсчвых интериалов , сигналов С,
С(нттветственно С 60(1+---)эл.град.
О 1
и Cj 60 (4 ) . эл.град., о тличающийся тем, что, с целью повышения качества процесса регулирования. На всем диапазоне ре- 5 гулирования местоположения середин i-x сигналов выключения и включения вентилей на участках 60- 90 эл. град, и 240-270 эл.град. определяют соответственно из функцио0
нальных зависимостей
60(F-Fo)
F
о
° эл.град. и С ; С. 7Г О
240(F-Fo)
25
эл.град., на участках
90-120 эл.град. и 270-300 эл.град. местоположения середин остальных сигналов определяют симметрично, формирование каждого i-ro от начала такто- вого интервала сигнала выключения и
включения вентилей осуществляют при изменении выходной частоты инвертора от F
° о(2-:-0 -2(1-1) при изменении выходной частоты от
N(21-1)
FP до F - FO ()(2i+l)-2i
внутри каждой половины тактовых интервалов формируют по 1 сигналов управления с 40 длитс-ль;;остью Л, определяемой из
функциональной зависимости А . „ .
(). aпpиF F F
F
на кажой половине тактовых интервалов формируют по i-1 сигналов выклк1чения и включения вентилей с постоянной длительностью, определяемой из соотношения Л . f2i-) формируют в середине каждого тактового интервала с длительностью Д , определяемой из функциональной зависимости
А
1 (2i-i)-t-4a-i)
6F 6NFp(2i-l)
с sj.
/.
п п п п п п
/ 60
-in
с, с, 30
п -- п-п п п
jiiBZnia
f л
%д.
с sj.
/.
п п п п
-in
30
-п п п
да
w
fe
/W
| Забродин Ю.С | |||
| Автономные тири- сторные инверторы с широтно -импульс- ным регулированием.-М.: Энергия, 1977 с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Обогреваемый отработавшими газами карбюратор для двигателей внутреннего горения | 1921 |
|
SU321A1 |
