Изобретение относится к электротехнике и может быть использовано при управлении преобразователями частоты на базе автономных инверторов напряжения, входящих в состав систем частотно-регулируемого электропривода переменного тока.
Известны способа так называемого несимметричного управления трехфазными преобразователями (инверторами) напряжения, при которых полуволна линейного выходного напряжения
формируется из четного количества импульсов на полупериоде. Однако спектральный состав выходных кривых при таких законах управления уступает аналогичным характеристикам преобразователя с симметричными законами управления.
Известен также способ симметричного управления преобразователями с симметричным относительно середины полупериодов формированием управляющих сигналов, характерной особенVI
Х|
vj
hO Ю
ностью которого является то, что дулирующие сигналы управления, продолжительность которых определяет величину выходного напряжения преоб- разователя, формируются внутри крайних тактовых интервалов каждой зоны управления. Однако изменение количества выходных импульсов в полуволне выходной кривой инвертора при управ- лении по данному способу осуществляется дискретным путем, что вызывает в эти моменты броски тока в силовых цепях преобразователя и нагрузки и является нежелательным.
Цель изобретения - повышение качества процесса регулирования за счет плавного безударного изменения формы кривой выходного напряжения преобразователя.
Поставленная цель достигается тем что при управлении по указанному способу, при котором основные вентили разных фаз и групп преобразователя- периодически включают и выключают с взаимным фазовым сдвигом в 60 эл.град в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрица- тельные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, на крайних на полупериодах тактовых интер
валах формируют модулирующие сигналы управления, продолжительность которых определяет величину выходного напряжения преобразователя, в процессе N-кратного связанного регули- рования частоты F и величины напряжения на начальной (минимальной) частоте F0 указанные крайние тактовые интервалы разбивают на N подынтервалов продолжительностью Ј ZЈ-N
каждый, в середине каждого из которых формируют модулирующие сигналы (импульсы) управления с продолжительn EN-EO
ностью А0 в пРОЧессе Регу
лирования преобразователя синхронизируют середины указанных тактовых интервалов с серединой соответствующего центрального тактового подын- тервала (при нечетном N) или с концом и началом соответствующих центральных тактовых подынтервалов (при
четном N), формирование каждого 1-го по направлению от середины тактового интервала к его границе модулирующего сигнала управления осуществляют при изменении выходной часi FoEN(n-l) тоты от F0 до F. (-1Ту(-12УЁ;Ё0
где п 21 для четных N и для нечетных N, причем при изменении выходной частоты от F0(Fjf1 ) до
i - NEFo
а также в диапазоне F0,, т -
iW Е0
внутри каждого тактового подынтервала формируют сигналы управления с
длительностью /Л g--( - ),
в диапазонах частот F- F F. no краям тактовых интервалов формируют сигналы управления с продолжительностью
J (п-1)-(п-2)Е+Е
ft
12F
(
а длительность остальных сигналов управления определяют как
Е(п-1)-Ел Л SiLEnOJ-l)
при этом минимальная и текущая ампли- туды питающего преобразователь напряжения определены соответственно
как Е
и Е.
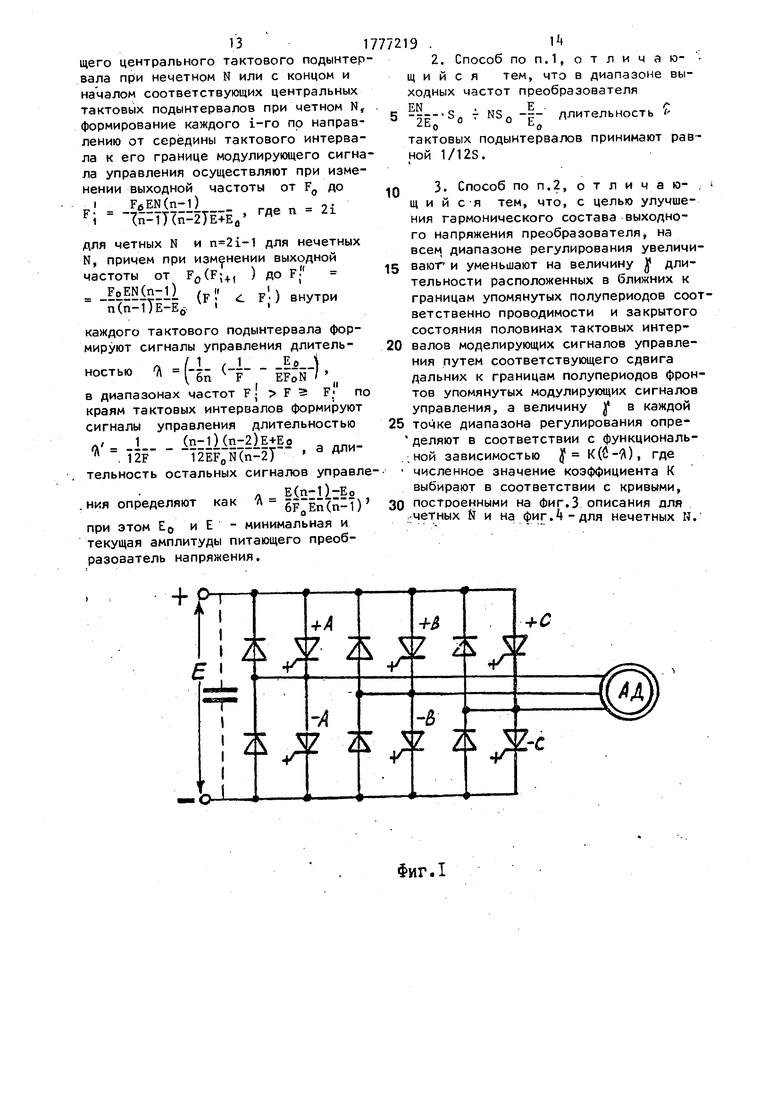
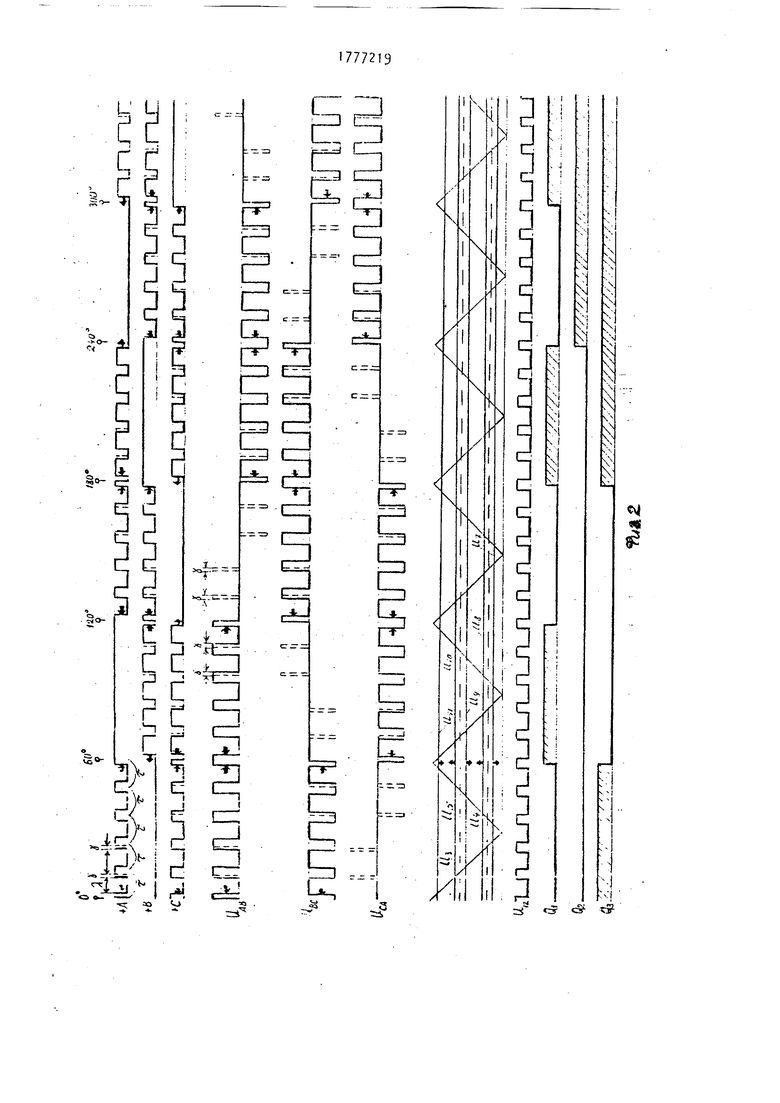
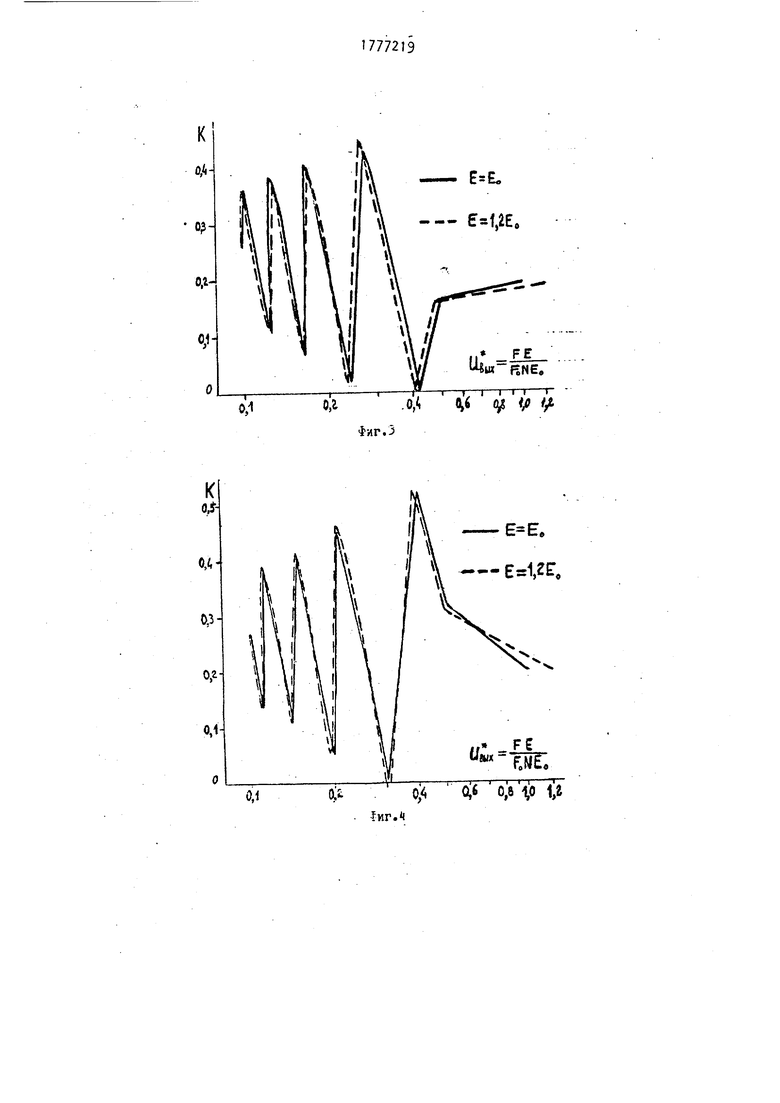
На фиг.1 представлена упрощенная силовая схема трехфазного мостового преобразователя на полностью управляемых вентилях; на фиг.2 - временные диаграммы, иллюстрирующие процес формирования управляющих сигналов на соответствующие вентили преобразователя, и кривые линейного выходного напряжения (в верхней части фиг.2), а также временные диаграммы, поясняющие процесс функционирования системы управления (в нижней части фиг.2); на фиг.З, - корреляционные кривые, связывающие значения коэффициента К с относительной величиной выходного напряжения (частоты) соответственно для четных и нечетных N; на фиг.5 517
функциональная схема системы управления.
На временных диаграммах, построенных на фиг.2, показаны сигналы (им- пульсы) управления, поступающие на вентили +А, +В, +С катодной группы мостовой схемы преобразователя в течение полупериода выходной частоты. Ниже приведены кривые линейного ВЫХОД ного напряжения преобразователя. Построенные кривые соответствуют при этом значению выходной частоты, близкому к начальной частоте FQ . Величина диапазона N связанного регулирова- ния частоты F и выходного напряжения при этом выбрана равной пяти (). В рассматриваемом случае положительный полупериод проводимости каждого вентиля и отрицательный полупериод закрытого состояния разбивают на три тактовых интервала продолжительностью 60 эл.град. каждый. Внутри крайних тактовых подынтервалов (в зонах 0-60, 120-180, 18Q-2M) и 300- ЗбО эл.град. применительно к зенти- лю +А) формируют модулирующие сигналы управления,разноименные с соответствующим полупериодом.
На фиг.2 для вентиля +А модулирующие сигналы соответствуют нулевому уровню временной диаграммы,а основные сигналы управления - положительному уровню. При этом формирование каждого модулирующего сигнала осуществляют в середине соответствующего тактового подынтервала продолжительностью
Ј на кот°Рые Разбивается
каждый из указанных тактовых интерва- лов, причем середина каждого из этих тактовых интервалов на всем диапазоне регулирования синхронизируется с серединой соответствующего центрального тактового подынтервала (при нечетном N) или с концом и началом соответствующих центральных тактовых подынтервалов (при четном N).
При начальной частоте F0 продолжительность ft0 каждого из указан- ных модулирующих сигналов управления EN-EO
- --- г гш и. л и.
равна fl0 jЈ-jgj -, где Е .и Е0 соответственно текущая и минимальная (опорная) амплитуды питающего преобразователь напряжения.
Регулирование частоты выходного напряжения преобразователя при рассматриваемом алгоритме управления осу196
ществлпется за счет постоянной поэтапной вариации продолжительностей, формируемых по краям указанных тактовых интервалов импульсов управления, в качестве которых попеременно выступают основные и модулирующие сигналы Указанные продолжительности последовательно уменьшаются с ростом выходной частоты, что показано стрелками на верхних временных диаграммах фиг. При этом для поддержания постоянства отношения величины выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых регулирование осуществляется за счет изменения продолжительности крайних на тактовых интервалах основных сигналов управления (этому поддиапазону соответствуют кривые на фиг.2), длительности модулирующих сигналов управления определяют как
л
л 6n F F0EN
где п 21 для четных N и для нечетных N; i - количество формируемых внутри половины каждого указанного тактового интервала модулирующих сигналов управления (включая центральный модулирующий сигнал управления при нечетных N). Граница указанных поддиапазонов регулирования наблюдается при
« FlEN(n-l) этом на частотах F; - yglgjv
при которых длительности крайних на тактовых интервалах основных сигналов управления уменьшаются до нуля.
На поддиапазонах регулирования, на которых по краям тактовых интервалов формируются модулирующие сигналы управления, длительности указанных крайних модулирующих сигналов определяются как
V- 1/12F - о , 1/1ZF 12EF0N(n-2l
а продолжительность ft остальных модулирующих сигналов управления при этом равна
55
ft
E&HhEo.
6F0 nE(n-l)
Верхние.границы подобных поддиапазонов наблюдаются на частотах
I F0EN(n-l)
i-fl.
(n-lTCn-ZjE+E
на которых величины уменьшаются до близких к нулю значений.
Продолжительность крайних на указанных тактовых интервалах основных и модулирующих сигналов управления в процессе регулирования по описанно- му алгоритму непрерывно позонно отождествляется (кодируется) с длительностью основного массива управляющих сигналов, которая, в свою очередь, зависит от текущих значений выходной частоты преобразователя, в связи с чем рассматриваемый способ управления может быть определен как широт- но-кодовый.
В соответствии с вышеизложенным для рассматриваемого алгоритма управления преобразователем с пятикратным диапазоном связанного регулирования величины и частоты напряжения () отмеченные границы переходов от одного поддиапазона регулирования к другому последовательно наблюдаются на частотах
для Е Еб
1f05Fe;F,1,54F0, FЈ - 2F0, F
2. 0 2. для E 1,2E
2 5F
F - 1,04 F0, F - 1,56F0, F - 1,94F0, F; 2,61F0,
45
для Е 1,5E0 Fj 1,03F0, Fj 1.58F,,, Fj 1,87F0, FЈ 2,73F0.
Как для четных,, так и для нечетных величин N до указанной граничной „j частоты FЈ регулирование производится по описанному выше алгоритму, в диапазоне же повышенных выходных частот, при F F2 , внутри половин тактовых интервалов формируется по од- ., ному (при нечетных N) и по два (при четных N) модулирующих сигнала управления с продолжительностью соответственно
8
§о Р„ЁУ
-l(.i
Л 6 F
ft
Этот этап продолжается до частоты
Fm
FЈEN EY
, на которой продолжитель
ность упомянутых сигналов управления уменьшается до нуля, чему соответствует максимальное значение выходного напряжения преобразователя. В соответствии с вышеизложенным верхнее значение предельной частоты Fm существенно зависит от текущего значения амплитуды Е питающего преобразователь напряжения. Так, при Е 1,5Е0
m
1,5F0N, т.е. в 1,5 раза превышает значение Fm при Е Efl, что имеет место в случае номинальной (минимальной) величины амплитуды питающего напряжения. Соответственно пропорционально Е увеличивается диапазон связанного регулирования частоты и величины напряжения преобразователя. Для улучшения гармонического состава выходного напряжения описанный алгоритм управления может быть несколько модифицирован. Для этого в
диапазонах выходных частот Р0 г
NEFo - --- продолжительность
Ео
if тактовых подынтервалов принимают равной соответственно Ј . Далее,
как показано пунктиром на временных диаграммах на фиг.2, увеличивают на величину У продолжительность модулирующих сигналов управления,расположенных в ближних к границам указанного полупериода проводимости половинах тактовых интервалов. Одновременно уменьшают на величину 1 длительность симметричных модулирующих сигналов, формируемых на половинах тактовых интервалов полупериода закрытого состояния. Благодаря подобной модификации алгоритма в крайних тридцатиградусных зонах полуволны линейного выходного напряжения формируются дополнительные выходные импульсы, количество которых плавно уменьшается с ростом выходной частоты. Наличие дополнительных импульсов позволяет скомпенсировать
91
амплитуду нежелательных паразитных гармоник спектра опорной выходной кривой и улучшить тем самым на всем диапазоне регулирования гармонический состав выходного сигнала. Продолжительность J при этом в данном случае в каждой точке диапазона регулирования определяется в соответствии с зависимостью у К(С - Л), где чис- ленное значение коэффициента К выбирают для конкретного Е в соответствии с кривыми, построенными на фнг.З для четных N и на фиг.4 для нечетных N. При этом в спектре выход- ного сигнала преобразователя на всем диапазоне регулирования полностью отсутствует наиболее нежелательная пятая гармоническая составляющая, а амплитуда седьмой гармоники заметно уменьшается.
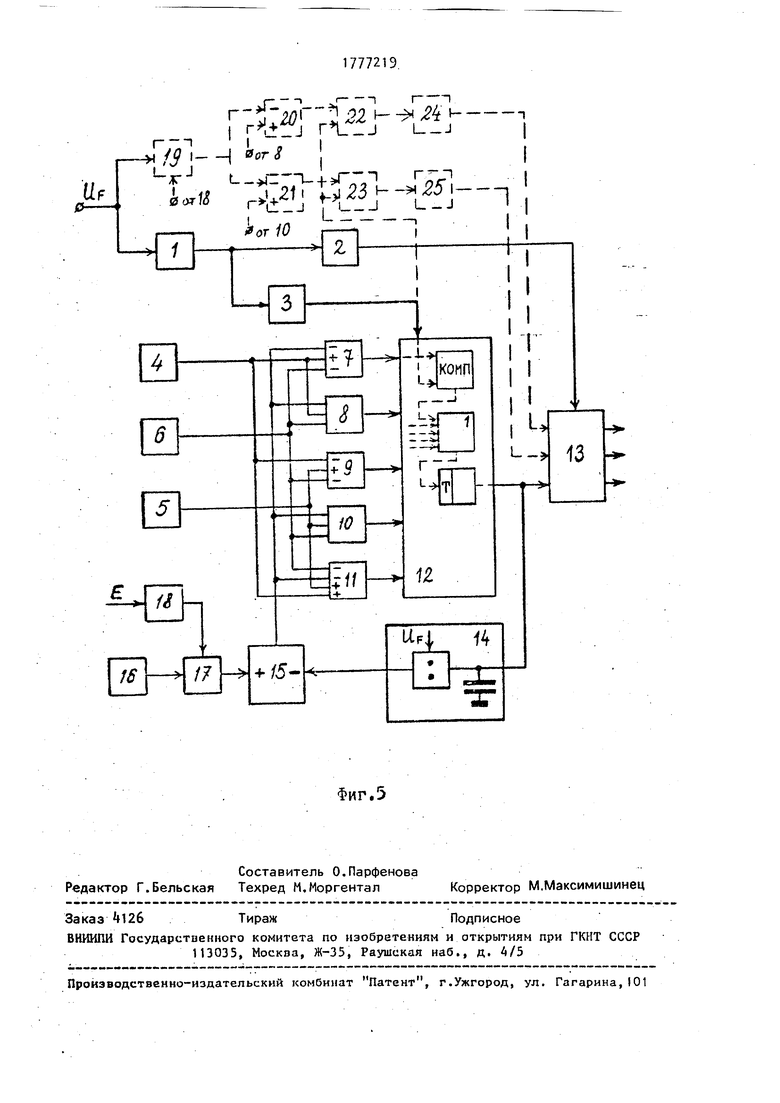
Функциональная схема системы управления вертикального типа, реализующей предлагаемый способ управления для варианта , приведена на фиг.5. Генератор тактовых импульсов 1, задающий выходную частоту преобразователя, связан с трехразрядным регистром 2 и с генератором линейно изменяющегося напряжения 3, выходной сигнал U которого (см.фиг.2) характеризуется двусторонней симметрией, постоянной крутизной и изменяющейся в процессе регулирования частоты амплитудой. Источники постоянного нал- ряжения 4-6 соединены с сумматорами , зыходы которых подключены к блоку формирования импульсов управления 12, связанному выходом с логическим распределителем управляющих импульсов 13, тактовые входы которого соединены с выходом регистра 2. 8 блоке 12 осуществляется непрерывное сопоставление сигнала развертки % с напряжениями U( . При этом блок формирования импульсов управления 12 включает, как показано на фиг.5 для одного канала, N компараторов с выходными формирователями коротких импульсов, выходы которых че- рез дизъюнктор связаны с входом счетного триггера. Длительность импульсов на выходе этого триггера соответствует длительности выходных импульсов преобразователя, после- довательность которых поступает на вход блока k определения суммарной длительности выходных импульсов с включенным на его
де конденсатором, выделяющим постоянную составляющую последовательности импульсных сигналов блока 12. Напряжение с последнего поступает далее на делитель, в котором осуществляется его деление на аналоговый сигнал задания выходной частоты преобразователя Up, в результате чего на выходе блока И на всем диапазоне регулирования формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов. Выход блока 1 связан с минусовым входом двухвходового интегратора 15.
Источник опорного напряжения 16 через усилитель с переменным коэффициентом передачи 17 подключен к плюсовому входу интегратора 15. Управляющая цепь усилителя 17 соединена с выходом датчика амплитуды питающего напряжения 13. Выход интегратора 15 связан с входами сумматоров 7-11 Величина напряжений 1-х источников постоянного напряжения k и 5, определяющих середины модулирующих сигналов, а также источников 6 и 16, находятся из соотношений
п - 2i-1 1
U4N U 5
U5 -f- uw
3 5
It Uiw 1 и T
m
U,
U6 - - 25 где Uirn - максимальная амплитуда
сигнала развертки, наблюдаемая на начальной выходной частоте преобразователя.
Внутренние параметры усилителя 17 и датчика 18 выбираются таким образом, чтобы при номинальном питающем напряжении Е
коэффициент
передачи усилителя 17 был равен единице, а при увеличении Е наблюдалось пропорциональное уменьшение коэффициента передачи усилителя 1/.
Алгоритм работы данного устройств управления в процессе регулирования частоты базируется на принципе поддержания постоянства абсолютной величины суммарной вольтсекундной площади выходных импульсов в полуволне линейного выходного напряжения преобразователя.
Это обеспечивается, в первую очередь, функционированием контура внут ренней обратной связи системы, включающей блок 1, узлы 16 и 18 и интегратор 5. Повышение частоты следования тактовых импульсов генератора 1 сопровождается соответствующим пропорциональным изменением (уменьшением) амплитуды сигнала U3 генератора 3, что сопровождается плавным безударным изменением формы кривой выходного напряжения на всем диа пазоне регулирования. При этом наблюдается последовательное периодическое изменение продолжительностей импульсов и пауз, формируемых на крайних участках выходной полувол- ны, а также ее середине. Логические функции, реализуемые распределителем 13 и поступающие в форме управляющих сигналов на вентили соответст-- вующих фаз, имеют соедующий вид:
,Q3 + ,a + Q,QbU,2 ;
,Q2Q3+ Q,Q3UW + Q,Q2U,a + + Q,QjJ,a + Q,Q3U|2;
+ Q,Q3U,a + ,
где .Q - выходные сигналы соответствующих разрядов регистра 2, которые на периоде выходной частоты, как показано на фиг.2, принимают последовательно значения 100, 001, 000, 101,110, 111, 100...
Для формирования дополнительных сигналов, улучшающих спектр выходного напряжения преобразователя, в сие тему, как показано на фиг.5 пункти-г. ром, может быть введен функциональный преобразователь 19, реализующий одну из требуемых функциональных .зааисимостей, представленных на фиг.З или К Далее сигнал с выхода блока 19, пропорциональный продолжительности У дополнительных импульсов, суммируется в сумматорах 20 и 21 с сигналами соответствующих ос- новных сумматоров и далее поступает через формирующие цепи, включающие компараторы 22 и 23 и триггеры 2 и . 25,.на дополнительные входы логичес«g Q 5
0
5 0
5 0 .
кого рлспределителя 13. Регистр 2 в этом случае должен выполняться четырехразрядным.
Таким образом, предложенный способ управления позволяет существенно улучшить качество связанного регулирования частоты и величины выходного напряжения трехфазных мостовых преобразователей за счет плавного безударного изменения формы кривой выходного напряжения, позволяющего исключить броски тока в силовых цепях преобразователя и нагрузки при переходе от одного поддиапазона регулирования к другому, что приводит также к повышению надежности функционирования преобразовательных систем.
Формула изобретения
1. Способ управления вентильным преобразователем с широтно-кодовым регулированием, заключающийся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл.град. в последовательности+А, -С, +В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, на крайних на полупериодах тактовых интервалах формируют модулирующие сигналы управления, продолжительность которых определяет величину выходного напряжения преобразователя, отличающийся тем, что, с целью обеспечения плавного безударного изменения формы кривой выходного напряжения преобразователя в процессе N-кратного связанного регулирования частоты F и величины напряжения, на начальной (минимальной) частоте F0 указанные крайние тактовые интервалы разбивают на N подынтервалов длительностью Ј 1/6F0N каждый, в середине каждого из которых формируют модулирующие сигналы управления длительностью
° B процессе регулирования преобразователя синхронизируют середины упомянутых тактовых интервалов с серединой соответствую-
131
щего центрального тактового подынтервала при нечетном N или с концом и началом соответствующих центральных тактовых подынтервалов при четном Nf формирование каждого 1-го по направлению от середины тактового интервала к его границе модулирующего сигнала управления осуществляют при изменении выходной частоты от F0 до I (n-l)„.
F; -TJiTT(n 2TETi/ гяе n 2l
для четных N и для нечетных N, причем при изменении выходной частоты от F0(F;4, ) до F
Ц-НУТРИ
каждого тактового подынтервала формируют сигналы управления длительл / 1 1 ЕО ностью Ъ -(-g- (-г - Г/ п
в диапазонах частот F. F Э F; по краям тактовых интервалов формируют сигналы управления длительностью л 1 (n-l)(n-2)E+Ee a ппм
12F12EF0lUn 27 Э АЛИ
тельность остальных сигналов управлед ECnrihS Л 6F0En(n-l)
ния определяют как
при этом Е0 и Е - минимальная и текущая амплитуды питающего преобразователь напряжения.
777219 .И
2. Способ поп.1,отличаю- щ и и с я тем, что в диапазоне выходных частот преобразователя
л
EN ч Мс Е
-щ-з0 г NSO--длительность
тактовых подынтервалов принимают равной 1/12S.
3. Способ по п.2, отличаю-, щи и с я тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя, на всем диапазоне регулирования увеличи- вают и уменьшают на величину J длительности расположенных в ближних к границам упомянутых полупериодов соответственно проводимости и закрытого состояния половинах тактовых интервалов моделирующих сигналов управления путем соответствующего сдвига дальних к границам полупериодов фронтов упомянутых модулирующих сигналов управления, а величину в каждой точке диапазона регулирования опре- деляют в соответствии с функциональой зависимостью - K(C-fl), где численное значение коэффициента К выбирают в соответствии с кривыми, построенными на фиг.З описания для четных N и на фиг. Ц- для нечетных N.
Сущность изобретения: способ управления базируется на 180-градусном алгоритме управления ключами трехфазной мостовой схемы преобразователя, обеспечивающем инвариантность формы выходного сигнала к параметрам нагрузки. Регулирование величины вы- , ходного напряжения преобразователя при этом осуществляется при помощи модулирующих сигналов управления, формируемых внутри крайних тактовых 60-градусных интервалов полупериодов проводимости, и закрытого состояния вентилей. Процесс широкодиапазонного связанного регулирования выходной частоты и напряжения преобразователя выполняется за счет постоянной поэтапной вариации длительностей крайних на тактовых интервалах основных и модулирующих сигналов управления, которые, как и продолжительность основного массива управляющих сигналов, находятся в соответствующих функциональных зависимостях с текущим и начальным значениями выходной частоты, величиной диапазона регулирования, амплитудой питающего напряжения и количеством формируемых внутри тактовых интервалов сигналов управления. Средняя частота коммутации вентилей при этом близка к постоянной величине. 2 з.п.ф-лы, 5 ил. сл с
Фиг.1
« iS &
JC
/f
ч x
1
/
jJ
/ Л
ч
Jf
/
I
1
/
4
/
Й
-f
л 5.
П Л
ЈUUL
C
j
vj
N VЈ l
| Забродин Ю.С.Автономные тирис- торные инверторы с широтно-импульс- ным регулированием.М.: Энергия, 1977, гл.2 | |||
| Способ управления автономным инвертором напряжения с широтно-импульсным регулированием | 1986 |
|
SU1361692A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
