Изобретение относится к электротехнике, к подклассу силовой преобразовательной техники, может быть использовано при управлении полупроводниковыми преобразователями частоты на базе инверторов напряжения, питающими асинхронные короткозамкнутые электродвигатели, и являются дополнительными к изобретению по авт.св. № 1492434.
Целью изобретения является улучшение спектрального состава выходного напряжения преобразователя.
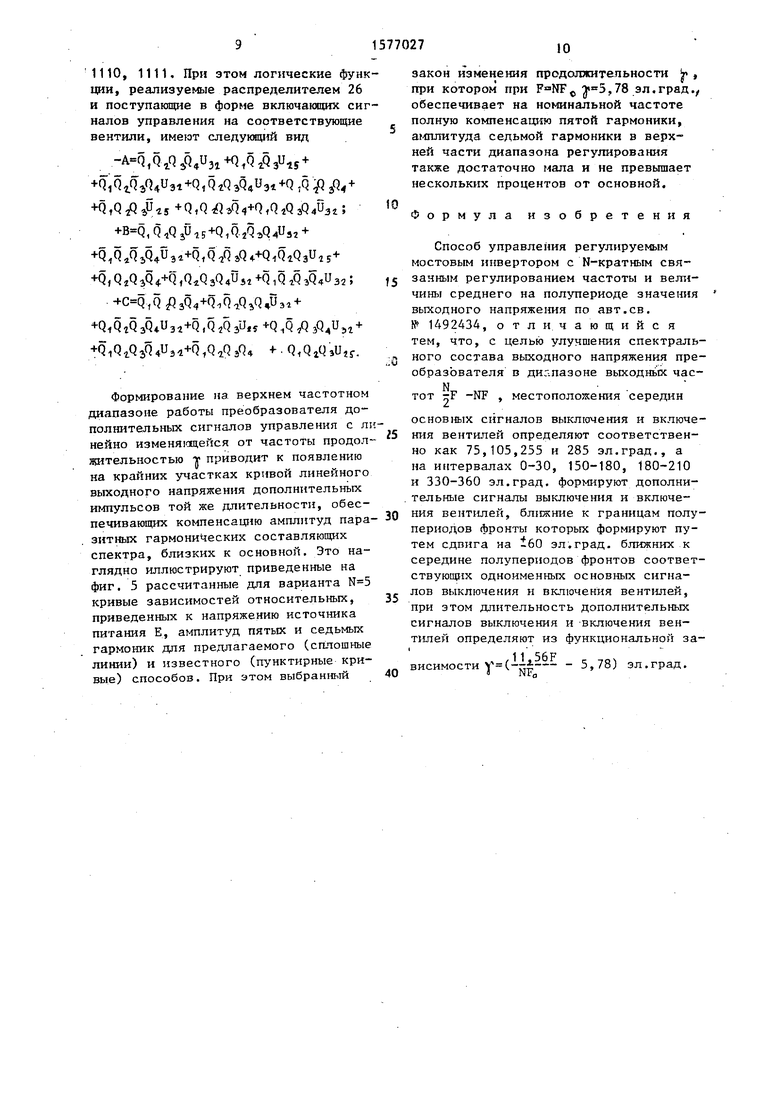
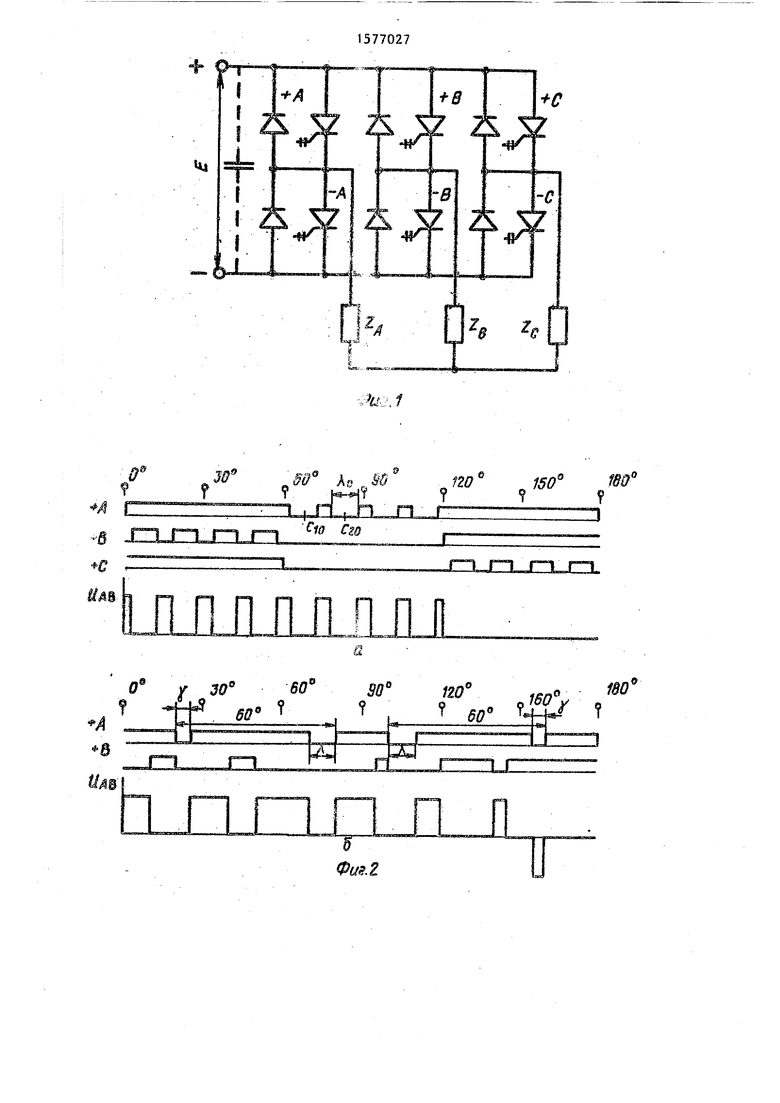
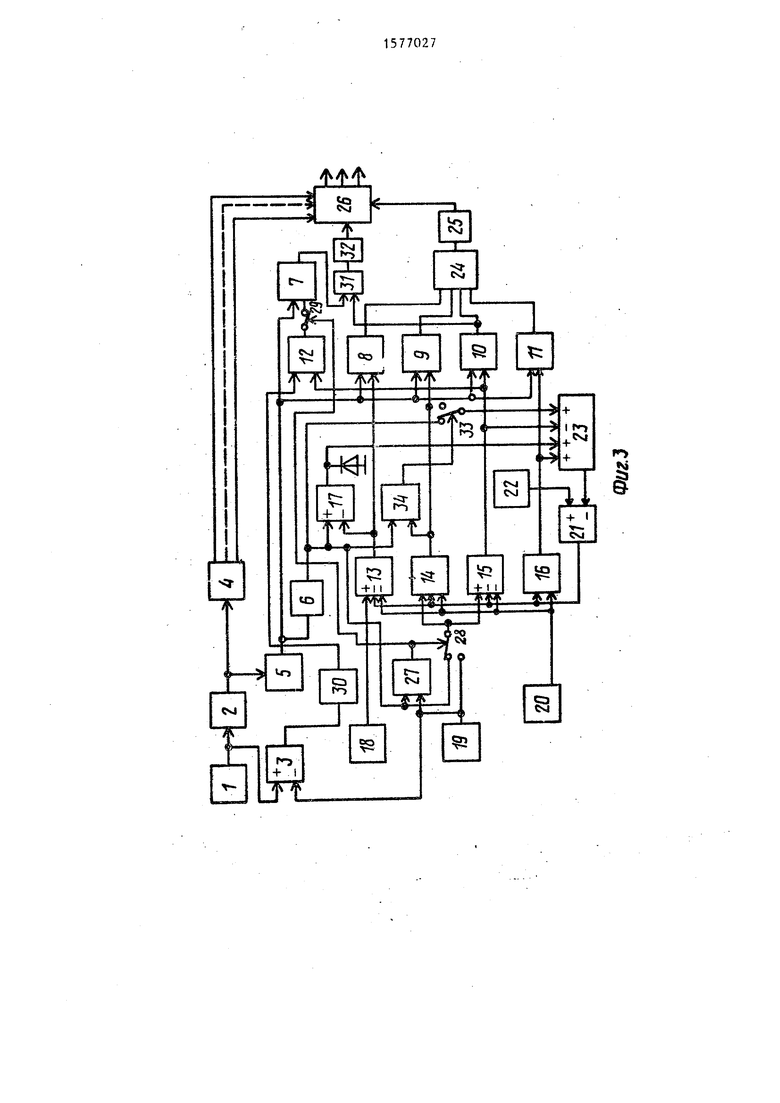
На фиг. 1 изображена силовая структура трехфазного преобразователя, выполненного на базе полностью управляемых ключей; на фиг. 2 - временные диаграммы, иллюстрирующие предлагаемый способ управления преобразователем; на фиг. 3 - функциональная схема системы управления, реализующая предлагаемый способ; на фиг. 4 - временные диаграммы, поясняющие алгоритм ее работы; на фиг. 5 - характеристики гармонического состава выходного напряжения преобразователя.
ьэ J
Временные диаграммы, представлен- ные на фиг. 2, иллюстрируют вариант связанного регулирования частоты и величины выходного напряжения преобразователя в четырехкратном диапазоне (). На трех верхних временных диаграммах на фиг. 2а изображены включающие импульсы управления, поступающие на начальной выходной час- тоте на вентили катодной группы преобразователя +Л, +В, +С в течение одного полупериода. На вентили анодной группы приходят соответствующие проинвертированные сигналы. Моменты равенства нулю приведенных сигналов управления на временных диаграммах соответствуют при этом интервалам фомирования запирающих вентили импульсов. На нижних временных диаграммах ча фиг. 2 представлены соответствую- цие участки кривой - инейиого выходного напряжения преобразователя .
Рассмотрим алгоритм формирования тЕравдяющих сигналов v& т.мгре фа- зы Л. На начальной выходной частоте преобразователя F0 (фиг. 2а) в сере- дяне зоны проводимости вентиля -f-A тактовый интервал от 60 до 120 эл. град, разбивается на четыре отрезка равной длительности, по 15 эл.град. каждый, внутри и посередине каждого из которых формируются управляющие (запирающие вентиль) импульсы продолжительностью
dgH 1 60 11 25 эл-градПри этом местоположения середин управляющих, (запирающих } сигналов С., и Сго на первой половине тактово го интервала, вычисляемые как
60(1+-т--), соответственно равны
67,5 и 82,5 эл.град. На вторых половинах тактовых интервалов на всем дипазоне регулирования управляющие импульсы располагаются симметрично. На тактовом интервале от 240 до 300 эл. градо в зоне закрытого состояния вентили аналогичным образом вырабатываются сигналы на включение вентиля.
Регулирование частоты выходного сигнала преобразователя при рассматриваемом алгоритме управления в диап
N зоне частот FQ- xF осуществляется за
счет постоянной поэтапной вариации продолжительностей центральных на тактовых интервалах управляющих импульсов и длительностей пауз между основными импульсами на центральных участках тактовых интервалов 60-градусных продолжительностей. На поддиапазонах регулирования, на которых в центральных тактовых интервалов форми руютйя управляющие импульсы изменяемы длительностей, продолжительность остальных сигналов управления не зависит от текущих значений выходной частоты преобразователя и определяется
из соотношения А зй| 72т-ТТ где количество формируемых на половине тактовых интервалов сигналов управления, включая центральный. На поддиапазонах регулирования, на которых регулирование осуществляется за счет из- ченения продолжительности центральных пауз между основными импульсами управления,длительность остальных сигналов управления варьируют в зависимости от текущих значений выхгдной частоты чреобраэователя в соответствии с фу кциональной зависимостью д т«т(- -
12. i F F0 Ы
После достижения выходной частотой преобразователя значения F0 и до номинальной частоты описанный алгоритм формирования управляющих сигналов видоизменяется.
Все указанные зависимости относятся к продолжительностям сигналов управления, вызывающих запирание вентилей внутри 180-градусных зон открытого состояния ключей и включение соответствующих вентилей внутри зон закрытого состояния,-на интервалы времени, равные продолжительностям упомянутых сигналов.
При анализируемом варианте связанного четырехкратного по частоте регулирования преобразователя () на первом поддиапазоне регулирования изменение частоты (длительности периода) осуществляется путем изменения продолжительности импульсов управления в соответствии с зависимостью
- -U-Lfi - -Ц
Л 12iV F0N; 4F/ и с текущим местоположением середин импульсов управления
( 2|:1)бО(И-§|-) эл.град,. C eOO+f- 2.2-1) ЭЛаГрад
Отмеченный первый по порядку поддиапазон регулирования занимает диапазон частот
V..zi r-ir$&Јtt rs
1,09F0,
после чего ближние к середине тактовых интервалов импульсы управления сливаются в один центральный сигнал управления увеличенной длительности.
Поддиапазон регулирования преобразователя, расположенный в зоне выходных частот F Ј - F .„
F 2 (2Н7 (272-Т)+Т 171 Fa xaPaKTePH зуется наличием расположенных в серединах тактовых интервалов центральных основных сигналов управления, продо - жительность которых изменяется от частоты в соответствии с зависимостью ./ 1 2и-1)(21Ч) + 1М 6F 6FeN(2i-t) 6F 2()(212-1)+1 1 7 6-4(2г2 -17г 6F 72F/
Длительности основных остальных сигналов управления ,при этом остаются
i-1 постоянными и равными А
2Н 1 (2-2-TTF
Увеличение выходной частоты преоб- разователя от F 2 до выходной частоты, равной половине поминальной F N
rF 2F , сопровождается последовательным уменьшением продолжительное- тей Л сигналов управления по зависимости (Ј; - 7Ј) Характерной осо- 12 i 41 а
бенностью предлагаемого способа управления преобразователем является мо дификация алгоритма управления в диапазоне повышенных значений выходных
NFn частот - NFj. Так, начиная с часмтtoTbi F местоположения сере-
дин управляющих сигналов жестко Аик- сируют на уровне 75,105,255 и 285 эл. град. Одновременно на интервалах 0-30 150-180, 180-210 и 330-360 эл.град. вырабатывают дополнительные импульсы управления, по одному на каждом из указанных интервалов, продолжитель- ность которых находится из функцио
o
5
0
5
0
5
0
5
нальной зависимости т(-fn- - 5.78)
2 89F NFe
5,78) эл.. Ближние к
о
границам полупериода фронты дополни- тельных сигналов управления при этом формируют путем сдвига на ±60 эл.град. ближних к середине полупериодов фронтов соответствующих одноименных (включающих или выключающих) основных сигналов управления. Указанный поддиапазон работы преобразователя иллюстрируется временными диаграммами, представленными на фиг.2,б.
Продолжительность дополнительных сигналов управления на диапазоне
NF0 .,„
-х- -NFe линейно увеличивается при этом
от близкой к нулю величины при частоNFoте -г- до 5,78 эл.град., наблюдаемой
на номинальной выходной частоте преобразователя NF0. В кривой линейного выходного напряжения , как показано на фиг. 26, на отмеченном поддиапазоне регулирования у границ полупериодов формируются дополнительные выходные импульсы, способствующие уменьшению (компенсации) амплигуц паразитных гармоник спектра, близких к основной гармонике.
Принцип построения систем управления, реализующих предлагаемый способ, рассмотрим на примере системы управления, функциональная схема которой, соответствующая варианту , представлена на фиг. 3. Блок 1 задания выходной частоты преобразователя, формируемый на выходе которого аналоговый сигнал прямо пропорционален величине выходной частоты и определяет частоту следования тактовых импульсов генератора 2 тактовых импульсов, которая в 12 раз превышает выходную частоту преобразователя, связан также с плюсовым входом сумматора 3. Выход генератора 2 подсоединен к входам регистра 4 и генератора 5 развертывающего линейно изменяющего напряжения, сигнал на выходе которого на всем диапазоне работы имеет постоянную в обе стороны крутизну и переменную амплитуду, уменьшающуюся с ростом частоты, которая фиксируется датчиком 6 амплитуды. Выход генератора 5 подключен к входам компараторов 7-11, в которых сигнал Uj- генератора 5 сопоставляется с выходными напряжениями сумматоров
71577027
12-46. Выход датчика 6 связан также с плюсовым входом сумматора 17.
Алгоритм функционирования устройства, выполненного по вертикальному принципу, поясняется временными диаграммами, представленными на фиг.4. При этом индексы сигналов на фиг.А соответствуют цифровым обозначениям соответствующих блоков и узлов на функциональной схеме устройства. Амплитуды сигналов источников 18 и 19 постоянного напряжения определяют собой временные положения середин импульсов кривой выходного напряжения преобразователя на начальной выходной частоте. При этом для Uw Чу/ийке
8
фронтов выходных импульсов, которые через элемент ИЛИ 24 поступают на вход счетного триггера 25 и далее, на вход логического распределителя 26 управляющих импульсов.
Описанный базовый алгоритм работы устройства имеет место на нижнем диапазоне выходных частот преобразова10
теля, при ,
В момент достижения выходной частотой преобразователя указанного граничного значения амплитуды сигналов U,g источника 19 и U
UfeeO,5U,MeKC, где и5/иакс- максимальная амплитуда пилообразного сигнала генератора 5, наблюдаемая на на- д канию ключа 29. Дальнейшее увеличение
6 на выходе датчика 6 становятся равны, что приводит к срабатыванию компаратора 27, переключению из одного положения в другое по команде компаратора 27 ключа 28 и замы30
чальной выходной частоте. Источники 1S и 19 связаны с г носовыми входами сумматоров 13-16, на другие входы кс- чорых поступает сигнал оч источника 10S амплитуда которого началь- 15 кую длительность выходных импульсов
яри U40 ,0625и M0i . На
входы сумматоров 13-16 приходит также корректирующий разностный сигнал с выхода сумматора 21, который на на- частоте равен нулю, благодаря чему суммарная продолжительность выходных импульсов, временное положение которых определяется амплитудами сигналов на выходах сумматоров 13-16, в процессе регулирования преобразователя остается постоянной, что соответствует закону постоянства отношения величины напряжения к частоте. Вели- Q чина напряжения U опорного источника 22 при этом определяется из соотношения
-tt-SJiUSfrsn 9чп ia N и и5мя« с 45
Из этого сигнала сумматором 21 осуществляется вычитание сигнала результирующего сумматора 23, плюсовые вхо-
35
U.
выходной частоты преобразователя вплоть до номинальной выходной частоты 4F0 происходит при постоянстве вырешенного в градл сах временного положения середин пауз между выходными импульсами, которые на фиг. 4 примени тельно к управляющим сигналам вентиля фазы +А обозначены как С и С . Одновременно положительный разностный сиг нал с выхода сумматора 3 (считается, что максимальная амплитуда выходного сигнала блока )Kc) через согла сующий усилитель 30 поступает на вход сумматора 12, где суммируется с напряжением иг. Суммарный сигнал U. через ключ 29 приходит на вход компаратора 7 с формирователем коротких им пульсов на выходе, вырабатывающего командные импульсы в моменты равенства сигналов Uj и U, , которые через элемент ИЛИ Л, на другой вход, которого приходят импульсы от компаратора 10, поступают на вход счетного триггера 32 и вызывают его периодичес кое срабатывание. На плюсовой вход сумматора 23 поступает сигнал через ключ 33, управляемый компаратором 34. Сигналы на выходах счетных триггеров 25 и 32, обозначенные на фиг. 4 соотвыходной частоты преобразователя вплоть до номинальной выходной частоты 4F0 происходит при постоянстве вырешенного в градл сах временного положения середин пауз между выходными импульсами, которые на фиг. 4 применительно к управляющим сигналам вентиля фазы +А обозначены как С и С . Одновременно положительный разностный сигнал с выхода сумматора 3 (считается, что максимальная амплитуда выходного сигнала блока )Kc) через согласующий усилитель 30 поступает на вход сумматора 12, где суммируется с напряжением иг. Суммарный сигнал U. через ключ 29 приходит на вход компаратора 7 с формирователем коротких импульсов на выходе, вырабатывающего командные импульсы в моменты равенства сигналов Uj и U, , которые через элемент ИЛИ Л, на другой вход, которого приходят импульсы от компаратора 10, поступают на вход счетного триггера 32 и вызывают его периодическое срабатывание. На плюсовой вход сумматора 23 поступает сигнал через ключ 33, управляемый компаратором 34. Сигналы на выходах счетных триггеров 25 и 32, обозначенные на фиг. 4 соотды которого связаны с выходами сумматоров 14, 16 и 17, а минусовый вход JQ ветственно как и 131, поступают сумматора 23 подключен к выходу сум- на входы логического распределителя 26 матора 15. Тем самым величина сигнала
управляющих импульсов. На тактовые входы распределителя 26 поступают сигналы четырехразрядного регистра 4, , выходные состояния Q.,0 ,Q3,0. которого в цифровой форме за период выходного напряжения можно последовательно записать как 1000, 1001, 0010, 0011, 0000, 0001, 1010, 1011, 1100, 1101,
U,,. пропорциональна суммарной на полупериоде продолжительности выходных импульсов. В моменты равенства сигналов U 1a -U 6 текущим значениям развертывающего напряжения U5 компараторами 8-11 вырабатываются короткие им- (команды) на формирование
8
фронтов выходных импульсов, которые через элемент ИЛИ 24 поступают на вход счетного триггера 25 и далее, на вход логического распределителя 26 управляющих импульсов.
Описанный базовый алгоритм работы устройства имеет место на нижнем диапазоне выходных частот преобразова10
теля, при ,
В момент достижения выходной частотой преобразователя указанного граничного значения амплитуды сигналов U,g источника 19 и U
канию ключа 29. Дальнейшее увеличение
6 на выходе датчика 6 становятся равны, что приводит к срабатыванию компаратора 27, переключению из одного положения в другое по команде компаратора 27 ключа 28 и замыканию ключа 29. Дальнейшее увеличение
выходной частоты преобразователя вплоть до номинальной выходной частоты 4F0 происходит при постоянстве вырешенного в градл сах временного положения середин пауз между выходными импульсами, которые на фиг. 4 применительно к управляющим сигналам вентиля фазы +А обозначены как С и С . Одновременно положительный разностный сигнал с выхода сумматора 3 (считается, что максимальная амплитуда выходного сигнала блока )Kc) через согласующий усилитель 30 поступает на вход сумматора 12, где суммируется с напряжением иг. Суммарный сигнал U. через ключ 29 приходит на вход компаратора 7 с формирователем коротких импульсов на выходе, вырабатывающего командные импульсы в моменты равенства сигналов Uj и U, , которые через элемент ИЛИ Л, на другой вход, которого приходят импульсы от компаратора 10, поступают на вход счетного триггера 32 и вызывают его периодическое срабатывание. На плюсовой вход сумматора 23 поступает сигнал через ключ 33, управляемый компаратором 34. Сигналы на выходах счетных триггеров 25 и 32, обозначенные на фиг. 4 соответственно как и 131, поступают на входы логического распределителя 26
Q ветственно как и 131, поступают на входы логического распределителя 26
управляющих импульсов. На тактовые входы распределителя 26 поступают сигналы четырехразрядного регистра 4, , выходные состояния Q.,0 ,Q3,0. которого в цифровой форме за период выходного напряжения можно последовательно записать как 1000, 1001, 0010, 0011, 0000, 0001, 1010, 1011, 1100, 1101,
1110, 1111. При этом логические функции, реализуемые распределителем 26 и поступающие в форме включающих сигналов управления на соответствующие вентили, имеют следующий вид
2А Мг «U3a+Q/Мзи«+ +QiQr(b(Uu3i+Q,QtQ3Q4U: +Q7Q, tQЈ i5+QtQ Q4+Q Q bQ4U34;
+B-Q1Q,Q3U15+Q,Q1QSQ4U3 +
+Q1M3Q4U3a+M7Q3Q +Q.TQiQ3ul5+ +QfQ2Q3Q Q,qiQ3Q4uM+q1QlQ3Q4u35;
+C QfQЈ30 Q.q,1Qiq4U3a +
QtQ3Q4u3«+Q,Q4Q3u« +QiQiQЈ4u9t+
+QiQiQ3Q4U3i+Q,QaQsQ4 + Q,Q2Q3Ulf.
Формирование на верхнем частотном диапазоне работы преобразователя дополнительных сигналов управления с лн , нейно изменяющейся от частоты продол 30
жительностью г приводит к появлению на крайних участках кривой линейного выходного напряжения дополнительных импульсов той же длительности, обеспечивающих компенсацию амплитуд пара зитных гармонических составляющих спектра, близких к основной. Это наглядно иллюстрируют приведенные на фиг. 5 рассчитанные для варианта кривые зависимостей относительных, приведенных к напряжению источника питания Е, амплитуд пятых и седьмых гармоник для предлагаемого (сплошные линии) и известного (пунктирные кривые) способов. При этом выбранный
10
f5
„0
, закон изменения продолжительности ji , при котором при FaNF0 5,78 эл.град.,, обеспечивает на номинальной частоте полную компенсацию пятой гармоники, амплитуда седьмой гармоники в верхней части диапазона регулирования также достаточно мала и не превышает нескольких процентов от основной.
Формула изобретения
Способ управления регулируемым мостовым инвертором с N-кратным связанным регулированием частоты и величины среднего на полупериоде значения выходного напряжения по авт.св. IP 1492434, отличающийся тем, что, с целью улучшения спектрального состава выходного напряжения преобразователя в диапазоне выходных часNтот -F -NF , местоположения середин
основных сигналов выключения и включения вентилей определяют соответственно как 75,105,255 и 285 эл.град., а на интервалах 0-30, 150-180, 180-210 и 330-360 эл.град. формируют дополнительные сигналы выключения и включе- 30 ния вентилей, ближние к границам полупериодов фронты которых формируют путем сдвига на 1бО зл.град. ближних к середине полупериодов фронтов соответствующих одноименных основных сигналов выключения и включения вентилей, при этом длительность дополнительных сигналов выключения и включения вентилей определяют из функциональной за35
40
висимости у(--Ј 5,78) эл.град.
NE,
-t-
M
I r I
JL
+A
+8
+C
Я
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Способ управления регулируемым мостовым инвертором напряжения | 1989 |
|
SU1734180A2 |
| Способ управления трехфазным регулируемым мостовым преобразователем | 1990 |
|
SU1721760A1 |
| Способ управления трехфазным автономным инвертором напряжения | 1989 |
|
SU1642570A1 |
| Способ управления трехфазным вентильным преобразователем | 1990 |
|
SU1720132A1 |
| Способ управления вентильным преобразователем с широтно-кодовым регулированием | 1990 |
|
SU1777219A1 |
| Способ управления трехфазным регулируемым мостовым инвертором | 1988 |
|
SU1554094A2 |
| Способ управления трехфазным преобразователем с широтно-кодовым регулированием | 1989 |
|
SU1646030A1 |
| Устройство для управления трехфазным вентильным инвертором | 1988 |
|
SU1525845A1 |
| Способ управления трехфазным мостовым инвертором | 1989 |
|
SU1676041A1 |

Изобретение относится к электротехнике и может быть использовано для управления преобразователями, входящими в состав систем частотно-регулируемого электропривода. Целью изобретения является улучшение спектрального состава выходного напряжения преобразователя в диапазоне выходных частот, близких к номинальной. Способ управления базируется на алгоритме 180-градусного управления ключами трехфазного преобразователя с дополнительными коммутациями вентилей, осуществляемыми в серединах соответствующих зон управления. Связанное регулирование частоты и величины выходного напряжения на нижней половине частотного диапазона осуществляют за счет постоянной поэтапной вариации длительностей пауз между импульсами управления и самих управляющих импульсов на центральных участках тактовых интервалов 60-градусной продолжительности. Для снижения амплитуд гармонических составляющих, близких к основной, на верхней половине частотного диапазона на интервалах 0-30, 150-180, 180-210, 330-360 эл. град генерируют дополнительные импульсы управления, продолжительность которых растет с увеличением частоты, а местоположения середин основных сигналов управления фиксируют на уровне 75, 105, 255 и 285 эл. град. 5 ил.
-A
Я
©
38s
§0° As SO
П , П ,
m .m n ff° r
5
лллллгии
0s
/..
60° да
5
55
a
m rn
A
0«.2
-8
X
qr
-Ј
z
A
lze c
.fa.1
/20 °
180
50°
h
1- LT
ПЛ
ФФФ
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
