Изобретение относится к электротехнике и может быть использовано при управлении преобразователями, применяемыми в системах частотно-регулируемого электропривода.
Известны алгоритмы широтно-импульс- ного управления трехфазными инверторами напряжения, при которых суммарная на периоде выходной частоты продолжительность включающих вентили сигналов управления составляет 120 или 150 эл.град.
Однако форма кривой выходного напряжения преобразователя при этом в значительной степени зависит от параметров нагрузки, что затрудняет эффективное использование данных алгоритмов при питании электродвигателей.
Известен также способ управления трехфазным регулируемым преобразователем, характеризующийся постоянной поэтапной вариацией длительностей пауз между импульсами (сигналами) управления
и самих управляющих импульсов на центральных участках тактовых интервалов 60- градусныхпродолжительностей, составляющих центральную часть 180-градусных зон проводимости и закрытого со- стояния вентилей. Для поддержания постоянства отношения величины среднего на полупериоде значения выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых регулирование осуществляется за счет изменения продолжительности центральных пауз, длительности сигналов управления варьируют в зависимости от значений выходной частоты и от количества вырабаты- ваемых импульсов управления. Внутри зон регулирования, на которых в центрах тактовых интервалов формируются управляющие импульсы изменяемых длительностей, продолжительность импульсов кривой выход- ного напряжения оставляют неизменной. При этом на всем диапазоне регулирования формирование сигналов управления осуществляют в серединах тактовых подынтервалов, начало и конец первого и последнего из которых синхронизированы соответственно с началом и концом соответствующего тактового интервала.
К числу недостатков упомянутого способа управления относится то, что на всем диапазоне регулирования в спектре кривой выходного напряжения преобразователя присутствуютзначительные по величине паразитные гармоники, среди которых, в частности, наиболее нежелательной является пятая гармоническая составляющая, создающая наибольший тормозной момент асинхронному электродвигателю, питающемуся от преобразователя.
Цель изобретения - улучшение гармо- нического состава выходного напряжения преобразователя;
Поставленная цель достигается тем, что при управлении по указанному способу, обеспечивающему N-кратное связанное ре- гулирование частоты и величины выходного напряжения преобразователя, при котором основные вентили разных фаз преобразователя периодически переключают с взаимным фазовым сдвигом в 60 эл.град, при этом для каждого вентиля на тактовых интервалах 60-120 эл.град, и на тактовых интервалах 240-300 эл.град. формируют основные сигналы управления, в соответствии с которыми выключают и включают вентили, коли- чество этих сигналов уменьшают с ростом выходной частоты F, причем на начальной выходной частоте F0 каждый из указанных тактовых интервалов разбивают на N под- ынтервалов продолжительностью
То - -Ј-р-jrr . внутри и посередине каждого
из которых формируют вышеупомянутые сигналы управления вентилями с начальной
,N -1
длительностью Ло , а в процессе
6 FoNr
регулирования выходной частоты на участках 60-90 и 240-270 эл.град. формирование каждого i-ro основного сигнала управления, начало первого из которых сфазировано с началом тактового интервала, осуществляют при изменении выходной частоты преобразователя от FO до FI . При этом в диапазоне изменения частоты FH-I F0 Р/ (если Fii FJ) внутри каждой половины тактовых интервалов формируют по i основных сигналов управления с длительностью
(-p р N ). а в диапазоне
Fi F каждой половине тактовых интервалов формируют по (i-1) основному
сигналу управления длительностью А , а i-й основной сигнал управления формируют в середине тактового интервала с длительностью А , причем на участках 90-120 и 270- 300 эл.град. формирование управляющих сигналов осуществляют симметрично. В отличие от известного способа, для каждого вентиля в крайних зонах полупериодов выходного напряжения 0-30, 150-180, 180- 210 и 330-360 эл.град. формируют дополнительные сигналы управления длительностью у. ближние к границам полупериодов фронты которых формируют путем сдвига на Ј60 эл.град. ближних к середине полупериодов фронтов соответствующих основных сигналов управления длительностью А или Я . В диапазоне выходных частот FO - (N-1) Fo продолжительность вышеупомянутых тактовых подынтервалов изменяют в соответствии с соотношением
т-,FO
6 F ( N Fo + Fo - F )
А и А находят
ii-1
величины
как
A
6 N Fo ( 2 i - 1 )
1 -2(l-1)r-i
1
6F j 6 N Fo ( 2 i - 1 ) значения FJ и FJ определяют из функциональных зависимостей:
FI FO x
y2iN-fl-VfilN.+ (2I -l)(N+3-il)
., 2N-2IN + 1 -V(2N-2IN+1 +4N(2|-1)(N + I-2lT
в диапазоне выходных частот преобразователя (N-1) Fo - NF0 продолжительность тактовых подынтервалов определяют как
т , р , а формирование каждого 1-го дополнительного сигнала управления осуществляют при изменении выходной частоты от FO до Fi (N - 2i + 1) Fo (Fi Fi Ff). при этом длительность у дополнительных сигналов управления определяют в соответствии с функциональной зависимостью
г | А-%-в4+СЈГС1
где К - номер подавляемой высшей гармоники;
Л , , ктг . кп . к -т( +i)-A ,
А 4 sm sin sin - - L%5/i
D , , кя . кп
В 4 sin -о- sin -7,- cos
(| +1)+A . 2
для частотных поддиапазонов Fi (N - 2i + 1) Fo F Fi , a
Kff
icti 2
C 4sin-sin-сое-cos -;:,n kfi , (fr (25-02 л 1 . к Ktf nЈ
42co5T5inkb
,/«
для частотных поддиапазонов FM F FI
в также при
Fi F NF0(npn i 2)
Сл .IX Л .l Tl
4 sin -7Г- sin -n- cos
К7Г
cos К х
,n r . Кn . (-R-5-) - sin-s-sin
KT
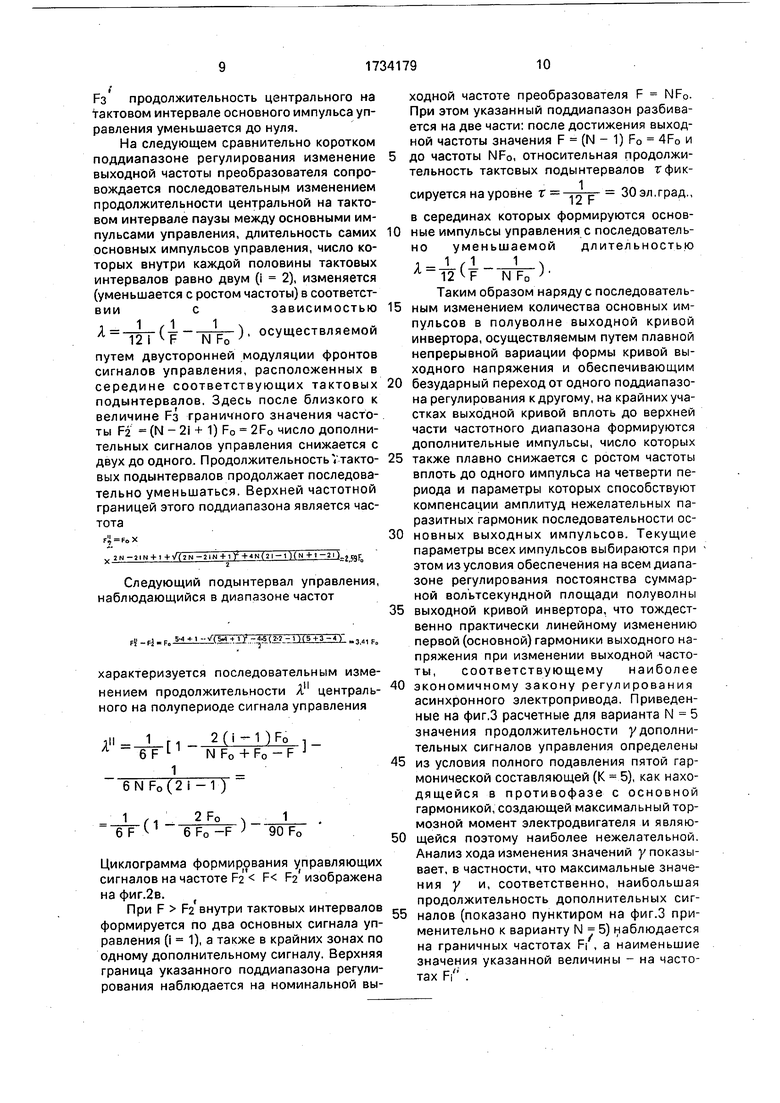
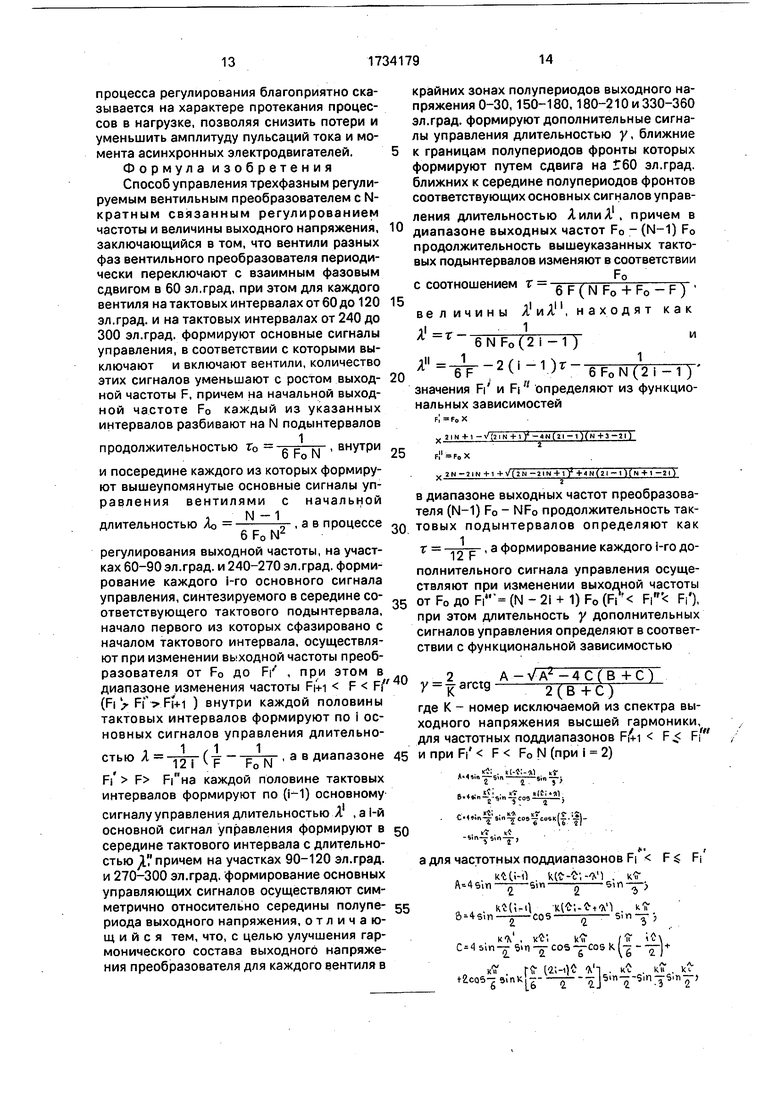
На фиг.1 приведена упрощенная структура силовой части преобразователя, выполненного на полностью управляемых тиристорах; на фиг.2 - временные диаграммы, иллюстрирующие процесс формирования управляющих сигналов для варианта N 5; на фиг.З - кривые, показывающие ход изменения относительной продолжительности тактовых подынтервалов, а также местоположения фронтов основных и дополнительных выходных импульсов в процессе регулирования преобразования; на фиг.4 - обобщенная функциональная схема системы управления, реализующей предложенный способ управления.
На временной диаграмме, построенной на фиг.2а, и соответствующей начальной (минимальной) выходной частоте преобразователя Fo показаны сигналы (импульсы) управления Uy, поступающие на находящийся в проводящем состоянии вентиль +А катодной группы трехфазной мостовой схемы инвертора на интервале От120 эл.град и вызывающие на этом интервале его периодическое запирание. Ниже приведен соответствующий участок кривой линейного
выходного напряжения преобразователя UAB. В данном случае тактовый интервал 60-120 эл.град. разбит на 5 тактовых подынтервалов с одинаковой длительностью Т0 , равной 12 эл.град., внутри и посередине
каждого из которых формируются основные управляющие импульсы протяженностью
До ть-г-;- 9,6 эл.град. На тактовом
интервале 240-300 эл.град. аналогичным образом в серединах тактовых подынтервалов вырабатывают основные сигналы на включение вентиля. Одновременно на участках 0-30 и 150-1 аи эл.град. зоны прдводи- мости каждого вентиля и на участках 180-210 и 330-360 эл.град. зоны закрытого состояния формируются дополнительные управляющие сигналы.
Рост выходной частоты преобразователя сопровождается соответствую- щим уменьшением абсолютной величины протяженности тактовых интервалов. Одновременно при управлении по описываемому способу в соответствии с соотношением
т - изменяется по
6 F ( N Fo + Fo - F ) нелинейной зависимости абсолютное значение продолжительности тактовых подынтервалов вплоть до значения частоты F (N-1) Fo. При этом на всем диапазоне регулирования начало каждого тактового интервала синхронизировано с началом соответствующего первого тактового подынтервала, а конец тактового интервала синхронизирован с концом последнего тактового подынтервала. Формирование основных управляющих импульсов производят в середине каждого тактового подынтервала, а формирование
ближних к краям полупериода фронтов дополнительных сигналов управления производят (показано стрелками на фиг.2) путем сдвига на 60 эл.град. ближних к центру полупериода фронтов соответствующих основных сигналов. Процесс регулирования частоты выходного напряжения инвертора сопровождается в этом случае постоянной поэтапной вариацией длительности пауз между всеми импульсами управления, в том
числе продолжительности пауз, а также длительности самих основных управляющих импульсов, на центральных участках тактовых интервалов, в зоне наложения друг на друга серединных тактовых подынтервалов,
формируемых симметрично в каждой половине соответствующих тактовых интервалов. При этом для поддержания постоянства отношения величины выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых в центрах тактовых интервалов формируются паузы, длительности основных сигналов управления варьируют в зависимости от значений выходной частоты и от количества формируемых сигналов на каждой половине тактовых интервалов в соответствиисвыражением
Я 2-р(-р- Fo N ). На поддиапазонах
регулирования, на которых в центрах тактовых интервалов формируют управляющие импульсы изменяемых длительностей, продолжительность остальных основных сигналов управления также зависит от текущих значений выходной частоты инвертора и определяетсяизсоотношения
Я т-g vi р /о 1 Граничные значения частот Fr и FJ, переходящих от одно- го из упомянутых поддиапазонов регулирования к другому, находятся из соответствующих функциональных зависимостей, включающих параметры F0, N, i. Кроме того, на верхнем частотном диапазоне при (N-1) Fo F NF0 продолжительность тактовых подынтервалов определяют как
т
12 F
, в середине которых вплоть до
номинальной частоты синтезируются сигна- лы управления с продолжительностью
111
Я (-р - N р ). Длительность у дополнительных сигналов управления определяют на всем диапазоне регулирования в соответствии с функциональной зависимостью
} -j arctg
(B +C) 2 (В +С)
A 4sin -sin-K(-y-A) B 4sin- cos ±Alsin ; С 4 sin 1ф- sin cos cos К X
ХГЯ- Т «in К7Г - КГ
X( --«-J -sinsin
При определении первого (или начального) значения граничной частоты следует учитывать, что оно зависит от величины числа N (четное оно или нечетное). Так, при четном значении N первой граничной частотой окажется FI (где i N/2), в этом случае в диапазоне F0 F РГУ,
11 (
-тут- {. р- -гг-р- J , а при N - нечетном первой граничной частотой будет частота FI
(где i
N + 1
2-), так как соответствующее
значение Fi 1 оказывается меньше F0 и, следовательно, не имеет смысла. Поэтому для рассматриваемого варианта на первом поддиапазоне регулирования выходной частоты преобразователя процесс регулирования осуществляется путем последовательного изменения продолжительности центрального на тактовом интервале импульса управления (стрелки на фиг.2а), производимом при i 3 в соответствии с соотношением:
, «ч- 1
Я -.ТР 1)Г 6NF0(2i-l)
вплоть до частоты
Рз Fo X
45
21+1 -V(2IN +1) - NC2I-1){N +3-2I) 2


Изобретение относится к электротехнике и может быть использовано для управления преобразователями, применяемыми в системах частотно-регулируемых электроприводов. Целью изобретения является улучшение гармонического состава выходного напряжения преобразователя. Способ управления заключается в периодическом переключении вентилей преобразователя с фазовым сдвигом 60 эл.град. Связанное регулирование частоты и величины выходного напряжения осуществляют за счет постоянного плавного изменения длительности основных сигналов управления на тактовых интервалах 60-120 и 240-300 эл.град. В отличие от известного продолжительность тактовых подынтервалов, внутри и посередине которых формируют основные сигналы управления на большей части диапазона регулирования, изменяют в функции выходной частоты по гиперболической зависимости. На крайних 30-ти градусных участках полупериодов управляющих сигналов вентилями преобразователя формируют дополнительные сигналы управления, продолжительность которых в каждой точке частотного диапазона определяют в соответствии с приведенным тансцендент- ным уравнением, включающим номер (частоту) устраняемой гармоники спектра, количество и длительность основных сигналов управления, продолжительность тактовых подынтервалов. 4 ил. со со 4 i ЧЭ
где К - номер подавляемой высшей гармоники, для частотных поддиапазонов FT ( - 2i + 1) РГ ;
. . Kt(i-rt .) . ч.Ъ ft 4snn-Ј-отgSin
K«li-4 Ktfc .- fri A l . K
-COS
k X A (ft 1C
О 4 sin -Ј s.n -Ј- cos -cos k -
к7 rfr (2.-04 i к . к1Г . к Tecaeie,nK i--r-jJe.n1-S,nTS.nr,
Iit
для частотных поддиапазонов Fi F FI , a также при FI F NF0(rfle i 2):
0
5
где N 5, i 3.
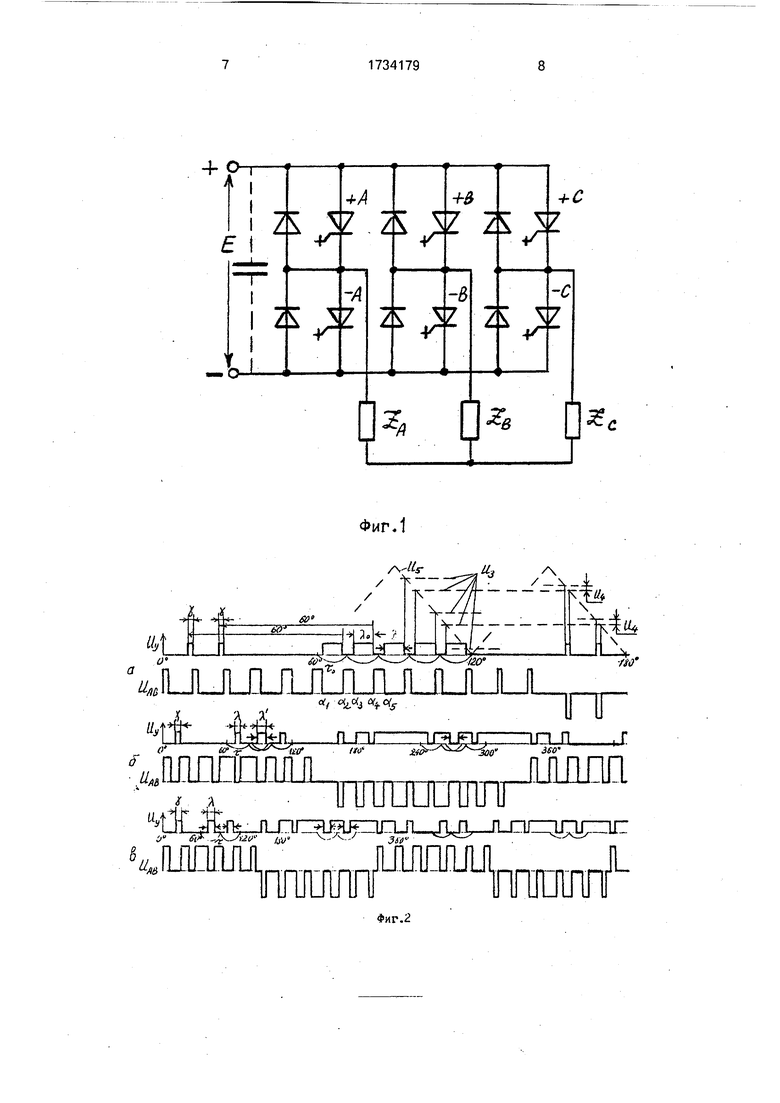
Подставляя указанные значения, определяем величину первой граничной частоты Рз 1,71 FO. Определяемые в соответствии с указанной методикой продолжительности X дополнительных сигналов управления на частотах F0 и Рз они соответственно равны 0,62 и 1,88 эл.град. (см. построенную на фиг.З зависимость, выраженной в электрических градусах величины у от выходной ча- стоты, рассчитанной для варианта устранения пятой гармоники (К 5).
В момент достижения выходной частотой преобразователя граничного значения
РЗ продолжительность центрального на тактовом интервале основного импульса управления уменьшается до нуля.
На следующем сравнительно коротком поддиапазоне регулирования изменение выходной частоты преобразователя сопровождается последовательным изменением продолжительности центральной на тактовом интервале паузы между основными импульсами управления, длительность самих основных импульсов управления, число которых внутри каждой половины тактовых интервалов равно двум (i 2), изменяется (уменьшается с ростом частоты) в соответствиисзависимостью
111
Я 2 i (р-к с ) осуществляемой
путем двусторонней модуляции фронтов сигналов управления, расположенных в середине соответствующих тактовых подынтервалов. Здесь после близкого к величине Рз граничного значения частоты Pi (N - 2i + 1) Fo 2F0 число дополнительных сигналов управления снижается с двух до одного. Продолжительность такто- вых подынтервалов продолжает последовательно уменьшаться. Верхней частотной границей этого поддиапазона является частота
X 2N-aiN + l+V(2N-2IN + iy+4N(2|-lKN + 1 -TlL; jjf
Следующий подынтервал управления, наблюдающийся в диапазоне частот
F -rim г, -frJjLl XM-M J -Д.5(И - 1 И5 +3 -О „ , „, Fo
характеризуется последовательным изменением продолжительности Я центрального на полупериоде сигнала управления
ill 2 ( i - 1 ) Fo , Л 6FL NF0 + Fo-FJ
6 N Fo (2 i -1)
1 M 2 Fo .1 f
6 F 6 Fo -F 90 Fo
Циклограмма формирования управляющих сигналов на частоте Fa F Fa изображена на фиг.2в.
При F Fa внутри тактовых интервалов формируется по два основных сигнала управления (i 1), а также в крайних зонах по одному дополнительному сигналу. Верхняя граница указанного поддиапазона регулирования наблюдается на номинальной вы5
ходной частоте преобразователя F NF0. При этом указанный поддиапазон разбивается на две части: после достижения выходной частоты значения F (N - 1) F0 4F0 и 5 до частоты NF0, относительная продолжительность тактовых подынтервалов т фиксируется на уровне т 12 F 30эл,град.,
в серединах которых формируются основ0 ные импульсы управления с последовательно уменьшаемой длительностью
i
12 F N Fo
Таким образом наряду с последовательным изменением количества основных импульсов в полуволне выходной кривой инвертора, осуществляемым путем плавной непрерывной вариации формы кривой выходного напряжения и обеспечивающим
0 безударный переход от одного поддиапазона регулирования к другому, на крайних участках выходной кривой вплоть до верхней части частотного диапазона формируются дополнительные импульсы, число которых также плавно снижается с ростом частоты вплоть до одного импульса на четверти периода и параметры которых способствуют компенсации амплитуд нежелательных паразитных гармоник последовательности основных выходных импульсов. Текущие параметры всех импульсов выбираются при этом из условия обеспечения на всем диапазоне регулирования постоянства суммарной вольтсекундной площади полуволны
5 выходной кривой инвертора, что тождественно практически линейному изменению первой (основной) гармоники выходного напряжения при изменении выходной частоты, соответствующему наиболее экономичному закону регулирования асинхронного электропривода. Приведенные на фиг.З расчетные для варианта N 5 значения продолжительности у дополнительных сигналов управления определены
5 из условия полного подавления пятой гармонической составляющей (К 5), как нахо- дящейся в противофазе с основной гармоникой, создающей максимальный тормозной момент электродвигателя и являю0 щейся поэтому наиболее нежелательной. Анализ хода изменения значений у показывает, в частности, что максимальные значения у и, соответственно, наибольшая продолжительность дополнительных сиг5 налов (показано пунктиром на фиг.З применительно к варианту N 5) наблюдается на граничных частотах FI , а наименьшие значения указанной величины - на частотах FI .
5
0
0
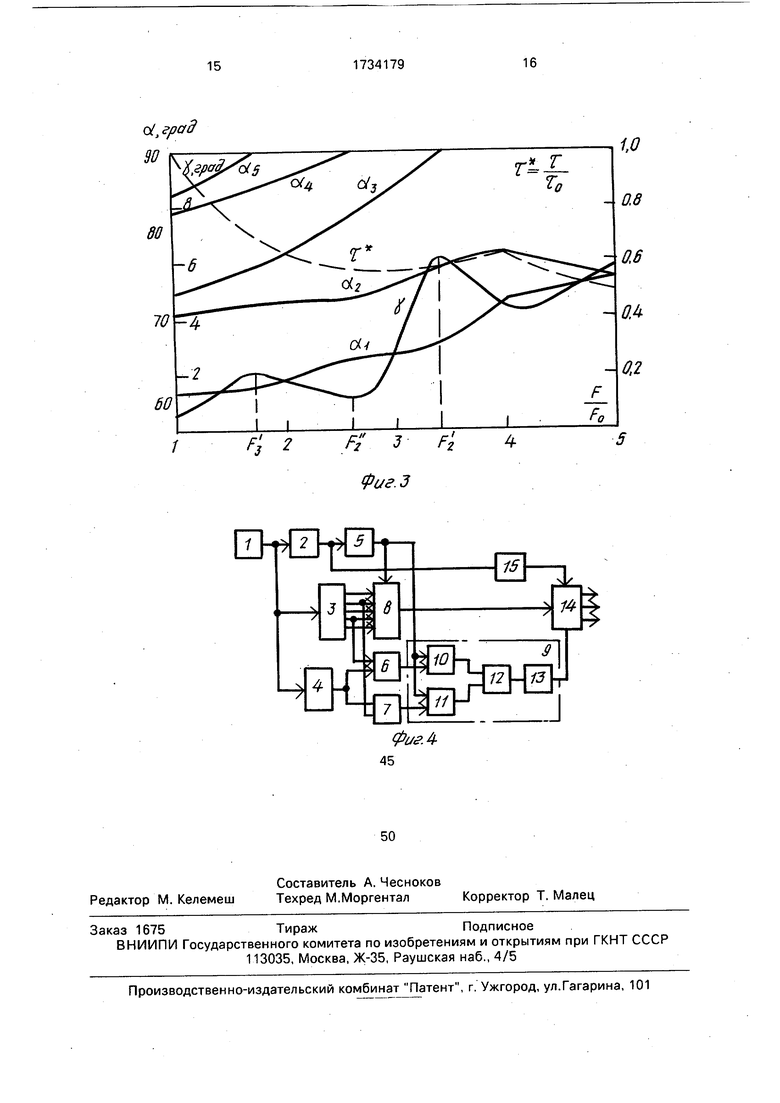
Обобщенная функциональная схема системы управления преобразователем, выполненной по вертикальному принципу и реализующей описанный способ, представлена на фиг,4. На выходе блока 1 задания частоты формируется сигнал Ui, величина которого прямо пропорциональна значению выходной частоты преобразователя, который подают на входы генератора 2 тактовых импульсов и функциональных преобразователей 3 и 4. При этом функциональный преобразователь 3 содержит в своем составе N выходных каналов. Частота следования тактовых импульсов генератора 2 определяет частоту выходного сигнала генератора 5 развертывающего симметричного в обе стороны пилообразного напряжения, которая при этом на реем диапазоне регулирования в шесть раз выше выходной частоты инвертора. Величина сигналов на выходах функционального преобразователя 3 на всем диапазоне регулирования пропорциональна текущим значениям временных положений фронтов а соответствующих основных сигналов управления на половине тактовых интервалов (верхняя временная диаграмма на фиг.2а). Величина выходного сигнала функционального преобразователя 4 в каждой точке диапазона регулирования пропорциональна абсолютному значению продолжительно- стей у дополнительных сигналов управления, кривая зависимости которой от частоты для варианта N 5 построена на фиг.З. Отмеченные значения а и у предварительно определяются расчетным путем из приведенных соотношений, характеризующих режим осуществления рассматриваемого способа управления, Относительные, выраженные в эл.град., величины углов а -О5 построены на фиг.З.
Сигналы с выхода функционального преобразователя 4 поступают на входы сумматоров 6 и 7, на другие входы которых поступают сигналы с четных выходов функционального преобразователя 3, при помощи которых осуществляется формирование четных фронтов аг и ОА . Выходы блока 3 и сумматоров 6 и 7 связаны (фиг.4) с соответствующими входами блоков формирования основных 8 и дополнительных 9 управляющих импульсов, на которые поступает также развертывающее напряжение Us генератора 5. В моменты равенства напряжения Us выходным сигналом узлов 3, 6 и 7 внутри блоков 8 и 9 вырабатываются (показано пунктиром на фиг.2а), команды на формирование фронтов управляющих (и выходных) импульсов, которые, как показано применительно к структуре блока 9, в форме коротких импульсов с компарирующих узлов 10 и 11 через дизъюнктор 12 поступают на вход счетного триггера 13, а с его выхода в форме последовательности импульсов с продолжительностью у- на информационный вход логического распределителя управляющих импульсов 14. Аналогичным образом на другой информационный вход распределителя 14 поступает последовательность импульсов, продолжительность которых эквивалентна текущей длительности основного массива выходных импульсов. Тактовый вход распределителя 14 связан с каналами четырехразрядного регистра 15. Выраженныев цифровом виде состояния выходов 04, 0.3, 02, 0.1 которого на периоде выходной частоты записываются как 1000,1001, 0010, 0011, 0000, 0001, 1010, 1011, 1100, 1101, 1110,1111.... Логические функции, реализуемые распределителем 14 и поступающие в форме управляющих импульсов на соответствующие вентили инвертора, имеют следующий вид:
-А Q4Q3Q2QiU 9 + Q4.Q3Q2Q1 + Оз0201+
+ Q3Q2Q1U9 + Q.4Q2U8 + Q3Q2U8 +
+Q4Q.3Q2Q1U9 + Q.4Q2QiU9;
В j}4Q.2QlU9 + Q.4Q2Q1 + Q3Q2Q1 +
tQsCteQiUg + Q4Q2U8 + Q4Q3Q2Us + Q4QiUg + +Q3Q2QiU9;
С ОзСШтОэ + ОзЙ201 +, 040.201 + +Q4Q2Q1U9 + Q4Q2U8 + Q3Q2U8 + Q.4Q2CH Ug + +Q4Q2QiUg.
Таким образом, предложенный способ управления позволяет существенно улучшить гармонический состав выходного напряжения трехфазных преобразователей как за счет увеличения на среднем и повышенном диапазонах выходных частот количества формируемых в полуволне выходных импульсов, что достигается путем непрерывной нелинейной модуляции по близкому к параболическому закону продолжительно- стей тактовых подннтервалов, так и за счет формирования в выходной кривой дополнительных импульсов, продолжительность и
временное положение которых изменяются по сформулированным нелинейным зависимостям, обеспечивающим полное устранение (компенсацию) из спектра выходного напряжения инвертора наиболее нежелательных паразитных гармонических составляющих. При этом в процессе регулирования обеспечивается плавный безударный переход от одного поддиапазона к другому. Улучшенное качество выход- ного напряжения преобразователя и
процесса регулирования благоприятно сказывается на характере протекания процессов в нагрузке, позволяя снизить потери и уменьшить амплитуду пульсаций тока и момента асинхронных электродвигателей. Формула изобретения Способ управления трехфазным регулируемым вентильным преобразователем с N- кратным связанным регулированием частоты и величины выходного напряжения, заключающийся в том, что вентили разных фаз вентильного преобразователя периодически переключают с взаимным фазовым сдвигом в 60 эл.град, при этом для каждого вентиля на тактовых интервалах от 60 до 120 эл.град. и на тактовых интервалах от 240 до 300 эл.град. формируют основные сигналы управления, в соответствии с которыми выключают и включают вентили, количество этих сигналов уменьшают с ростом выход- ной частоты F, причем на начальной выходной частоте F0 каждый из указанных интервалов разбивают на N подынтервалов
1
продолжительностью То
6Fo N внутри
и посередине каждого из которых формируют вышеупомянутые основные сигналы управления вентилями с начальной
длительностью Яо - а в процессе
6 F0Nr
регулирования выходной частоты, на участках 60-90 эл.град. и 240-270 эл.град. формирование каждого 1-го основного сигнала управления, синтезируемого в середине соответствующего тактового подынтервала, начало первого из которых сфазировано с началом тактового интервала, осуществляют при изменении выходной частоты преобразователя от Fo до FI , при этом в диапазоне изменения частоты FH-I F Fi (Fi У Ff- FI+I ) внутри каждой половины тактовых интервалов формируют по i основных сигналов управления длительно1 1
стью Я
12 i VF F0N и
,а в диапазоне
FI F FI на каждой половине тактовых интервалов формируют по (i-1) основному
сигналу управления длительностью Я , основной сигнал управления формируют в середине тактового интервала с длительностью Д причем на участках 90-120 эл.град. и 270-300 эл.град. формирование основных управляющих сигналов осуществляют симметрично относительно середины полупе- риода выходного напряжения, отличающийся тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя для каждого вентиля в
крайних зонах полупериодов выходного напряжения 0-30,150-180,180-210 и 330-360 эл.град. формируют дополнительные сигналы управления длительностью у, ближние к границам полупериодов фронты которых формируют путем сдвига на Ј60 эл.град. ближних к середине полупериодов фронтов соответствующих основных сигналов управления длительностью А или Я1 , причем в диапазоне выходных частот F0 - (N-1) F0 продолжительность вышеуказанных тактовых подынтервалов изменяют в соответствии
Fo
с соотношением т g с / м с -i
О Г ГМ Го т Го - Г )
величины Я1 и Я, находят как
ii г1..
А т б N Fo (2 I - 1 )
А ()Т 6F0N(2I-1) значения FI и FI определяют из функциональных зависимостей
х 2IN + 1 - /{2IN+l)i- «NCll - l)(N +3 - 21)
c t - e v FI Fo X
IN - 2IN +1 +V(2N - 2IN + 1T + N(2I - t )N + 1 - 2|)
в диапазоне выходных частот преобразователя (N-1) FO - NFo продолжительность тактовых подынтервалов определяют как
т -„ р , а формирование каждого i-ro дополнительного сигнала управления осуществляют при изменении выходной частоты от Fo до (N - 21 + 1) Fo (Fi FI ). при этом длительность у дополнительных сигналов управления определяют в соответствии с функциональной зависимостью
x.
где К - номер исключаемой из спектра выходного напряжения высшей гармоники, для частотных поддиапазонов Fi+i F F W и при FI F Fo N (при i 2)
«...Ј,%.,
-4 . «V, . „Т (t,5ll 6.tt.n-e.,,«-j«e-i-i j
-. . кЈ1 . к к /с- ;Јi Sin-jeos- совкМт--- k7 к
-sinrjsin-j-,
« t
для частотных поддиапазонов FI F$ Fj
„ , . kUi-0 . k№-fc;- Vl . A--4 s.n - -smg5in -
„ A . K«(t-i Kt-t-. . Ъ sm-2-cc sо
. K-X1 , кГ, Ј
C-4s,ni:e.r,TcoeTcosK(-g-T)
iff . rfi- tu;-i)C -x -i . к-г . KiT . a
teco5-g9.nK --- --- J5m--5,.iy)
4
ил
J
P.
JZj&i : го
ILJJULn П П П П П Jl В Д ...
«,«M,«frЦ-Ц
M-fr Mn.
fl ft
.
JLJIL
in n , r
3fO
mraurnmrj on
fe. ) (
г,
Фиг.1
,
КГ
JZj&i : го
in n , r
3fO
on
ФиеЛ
| Забродин Ю.С | |||
| Автономные тиристор- ные инверторы с широтно-импульсным регулированием | |||
| М.: Энергия, 1977, с.17-38 | |||
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
