Изобретение относится к электротехнике и может быть исггальзовано в электроприводах егчю-транспорт- ных машин.
Цель изобретения - повышение КПД электропривода.
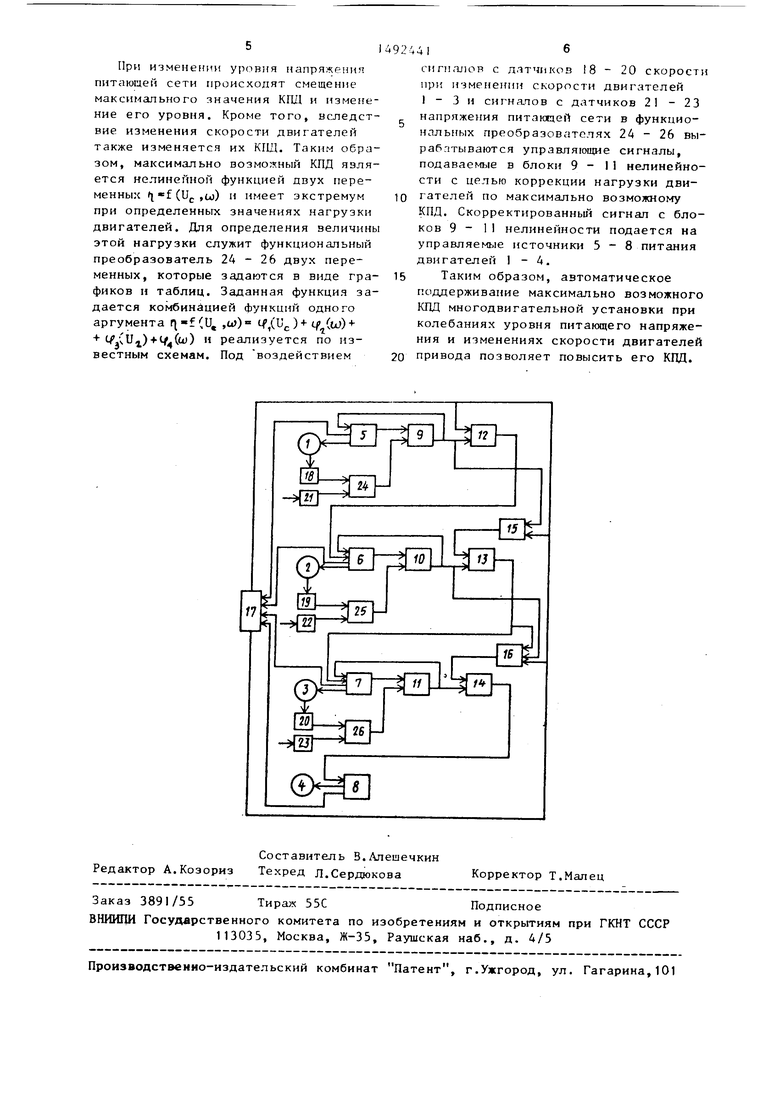
На че1)теже представлена структурная схема для четырехдвигательного
электропривода переменного тока.
Электропривод содержит электродвигатели 1 - 4 ,,управляемые источники 5 - 8 с двумя измерительными выходами и двумя упразля1яцими входами, блоки 9-11 нелинейности с одним входом, логические элементы 12- 14, индивидуальные сумматоры 15 и 16 потребляемой мощности, общий сумма- тор 17 потребляемой мощности, силовой выход каждого управляемого источника 5-8 питания подключен к соответствующему электродвигателю 1-4, первый и второй измерительны выходы каждого управляемого источника 5-8 питания подключены к одному входу соответствующего блока 9-11 нелинейности и к соответствующим входам общего сумматора 17 потребляемой мощности, выход каждог блока 9-11 нелинейности подключен к одному управляющему входу соответствующего управляемого источника 5 - 8 питания и к одному входу соответ- ствующего индивидуального сумматора 15 и 16 потребляемой мощности, другие входы которых подключены к соответствующим выходам общего сумматора 17 потребляемой мощности, входы каждого последующего после первого индивидуального сумматора 16 потребляемой мощности подключены к выходам собственного и предшествующих блоков нелинейности, выход каждого логического элемента 12 - 14 подключен к другому управляющему входу второго 6 и последующих 7 и 8 управляемых источников питания, датчики 18-20 скорости, установлен- ные на валах соответствующих электродвигателей 1-3, датчики 21 - 23 напряжения питающей сети, функциональные преобразователи 24 - 26, каждый блок 9-11 нелинейности до- полнен другим входом, выходы датчиков скорости 18 - 20 и напряжения 21 - 23 подключены к соответствующим входам функциональных преобразователей 24 - 26, выходы которых подключены к другим входам соответ- cTBytcDjHX блоков 9-11 нелинейности Электропривод работает следующим образом.
При запуске привода первоначально включают первый двигатель 1, который питается от управляемого источника 5 питания. При этом с источника 5 снимается сиг-нал, пропорциональный мощности, потребляемой двигателем 1 в текущий момент времени, и подается в блок 9 нелинейности, который работает как ограничитель, т.е. пропускает сигнал на второй вход логического элемента 12 до тех пор, пока по мере роста потребляемой двигателем 1 мощности он не достигнет величины, соответствующей номинальной загрузке двигателя 1 . 3 этот момент происходит отсечка сигнала, двигатель 1 перестает нагружаться, а логический элемент 12, который выполняет функцию ключа и запрещает дальнейшее прохождение сигнала.до тех пор, пока сигнал, поступающий на его первый вход с сумматора 17, о величине текущей потребляемой приводом мощности не будет больше или равен мощности источника 1. Сравнив сигналы, логический элемент 12 подает сигнал на управляемый источник 2 следующего двигателя 6, разрешающий загрузку двигателя 2. Тот же сигнал с выхода блока 9 нелинейности поступает на индивидуальный сумматор 15, где в результате алгебраического сложения сигналов общей потребляемой приводом мощности на его выходе выра батывается сигнал, соответствующий величине мощности, проходящейся на второй двигатель 2. Последний начинает нагружаться, при этом сигнал, пропорциональный величине мощности, потребляемой двигателем 2 управляемого источника 6, подается в блок 10 нелинейности, который пропускает сигнал на логический элемент 13 до тех пор, пока он не достигнет величины, соответствующей номинальной загрузке двигателя 2. В это время происходит отсечка сигнала, двигатель 2 прекращает нагружаться, а логический элемент 13, на второй вход которого поступает сигнал с общего сумматора 17, прошедший через индивидуальный сумматор 15, сравнивает сигналы и при достижении ими заданной величины подает сигнал на управляемый источник 7, разрешающий нагружать двигатель 3. Указанный процесс продолжается до разгона последнего двигателя 4, который может оставаться недогруженным. В этом случае обеспечивается оптимальная работа () двигателей привода, т.е. трех двигателей 1-3.
5
При изменении урствия напряжения питающей сети происходят смещение максимального значения КПД и изменение его уровня. Кроме того, вспедст- вие изменения скорости двигателей также изменяется их КГЩ. Таким образом, максимально возмо;кнын КПД является нелинейной функцией двух переменных fi«f (Uj, ,ы) и имеет экстремум при определенных значениях нагрузки двигателей. Для определения величины этой нагрузки служит функциональный преобразователь 24 - 26 двух переменных, которые задаются в виде гра- фиков и таблиц. Заданная функция задается комбинацией функций одного аргумента q-f(U, ,ы) tf/U )(uj)-t- + с/(U4) + 4 (u)) и реализуется по известным схемам. Под воздействием
416
сиги.тлов с датчиков 18-20 скорости при изменении скорости двигателей I - 3 и сигнапов с датчиков 21-23 напряжения питакхдей сети в функциональных преобразователях 24 - 26 вы- раблтываются управляющие сигналы, подаваемые в блоки 9-11 нелинейности с целью коррекции нагрузки двигателей по максимально возможному КПД. Скорректированный сигнал с блоков 9-11 нелинейности подается на управляемые источники 5 - 8 питания двигателей 1 - 4.
Таким образом, автоматическое поддерживание максимально возможного КГЩ многодвигательной установки при колебаниях уровня питающего напряжения и изменениях скорости двигателей привода позволяет повысить его КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Способ регулирования производительности компрессора и устройство для его осуществления | 1988 |
|
SU1590673A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Устройство для управления возбуждения электродвигателя постоянного тока | 1980 |
|
SU892634A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Реверсивный электропривод постоянного тока | 1977 |
|
SU748758A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах подъемно-транспортных машин. Цель изобретения - повышение КПД электропривода. Электропривод содержит N электродвигателей, N управляемых источников питания с двумя измерительными выходами и двумя управляющими входами, N блоков нелинейности с одним входом, N логических элементов, N - 1 индивидуальных сумматоров потребляемой мощности, общий сумматор потребляемой мощности. В него дополнительно введены N датчиков скорости, установленных на валах соответствующих электродвигателей, N датчиков напряжения питающей сети и N функциональных преобразователей. 1 ил.
| Алексеев А.Е | |||
| и др | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сборник трудов Ленинградского института инженеров железнодорожного транспорта, вын | |||
| Искроудержатель для паровозов | 1920 |
|
SU271A1 |
| с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР № 856902, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
