Известные очноканальиые автоматические электронные измерители временного сдвига случайных коррелированных сигналов содержат приемник с фильтром, дифференцирующим звеном и ограничителем, блоки неременной задержки, умножения и управления и разностный интегратор.
Предложенный измеритель отличается тем, что блок умножения выполнен в виде потенциалоскопа, соединенгюго с двусторонним выпрямителем. Для нропускания обоих сигналов но общему тракту нрименен входной коммутатор, соединенный с приемником. Это позволяет уиростить устройство и иовысить точность измерения временного сдвига.
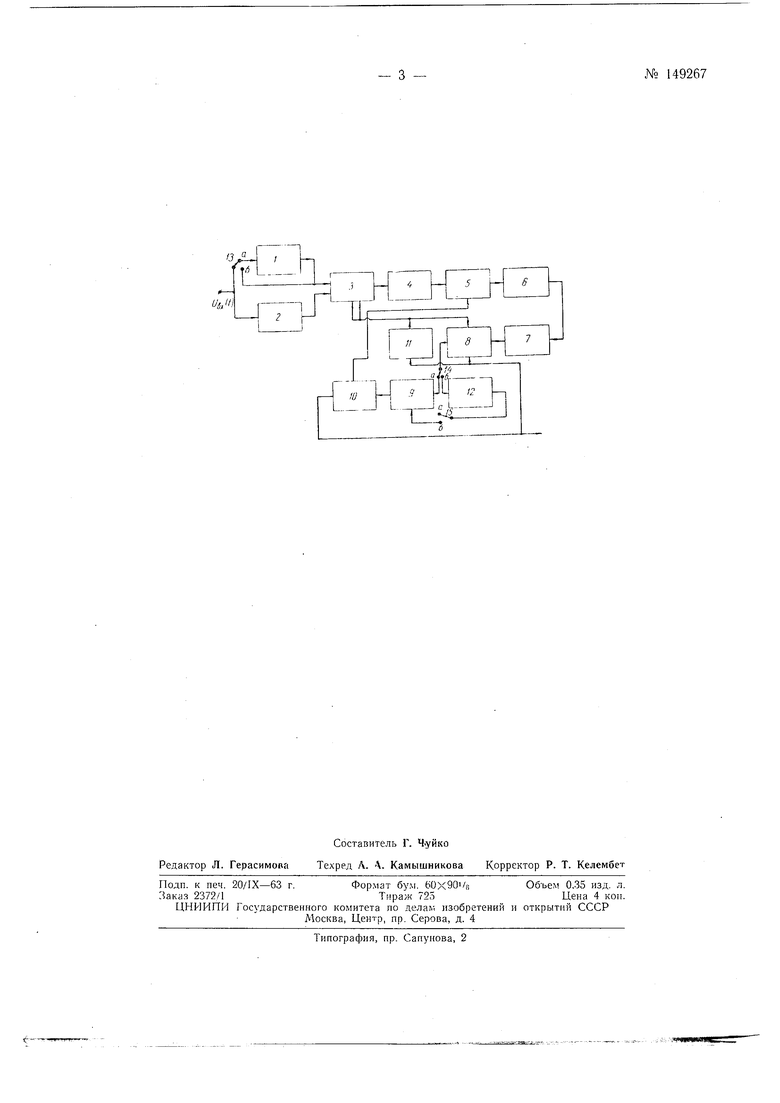
На чертеже приведена блок-схема предложенного измерителя.
На вход измерителя от коммутируемого приемника (на чертеже не ноказан) поступает сигнал 6ft. (t), который в течение одного полного цикла работы измерителя (т. е. в течение двух отрезков времени величиной т может быть описан формулой:
U,.,(t) ,(t}
+ U,(t--,}
(где - и i(t) и U.2(t TO) - сигналы, постунающие на приемник и сдвинутые на время to), если начало отсчета времени совместить с началом цикла.
Этот сигнал проходит через дифференцирующее звено / и корректирующее 2. Дифференцирующее звено представляет собой диф ференцирующнй ламповый усилитель с малой постоянной времени. Корректирующее инерционное звено состоит из сопротивления и емкости с постоянной времени, равной постоянной времени дифференцирования.
Второй коммутатор сигналов 3 работает синхронно с входным нервым коммутатором (на чертеже не показан) и пропускает поочередно первый дифференцированный сигнал Ui (t) и второй cF oppeктиpoвaнный U-2(t-TO).
Затем сигналы проходят через симметричный ограничитель 4, выполненный на диодах с усилителями, и поочередно поступают па сигнальную пластину потенциалоскопа 5, где непрерывно один сигнал записывается на другой.
С коллектора потенциалоскона снимают разностное напряжение, которое усиливается и выпрямляется на двухстороннем диодном выпря.мителе 6 относительно среднего зфовня. В результате этого получается произведение сигналов. На разностном интеграторе 7 восстанавливаются импульсы с амплитудой -/определяющие вероятность совпадения и усреднение одноименных знаков. .Путем усреднения за отрезок времени т получают сигнал ощибки, пропорциопальный
разности вероятностей или производной взаимной корреляционной функции pis (г).
Сигнал ошибки с помощью ключевого селектора 8 подают в схему 9 памяти по задержке, выполненной на накопительной емкости. Это происходит в течение короткого периода времени обратного хода т обработки хода развертки луча.
Схема памяти по зддержке хранит аналог (в виде напряжения величины задержки т, которое в течениеббр тного хода скачком изменяется на величину, пропорциональную сигналу ошибки. При этом система автоматического регулирования сфазирована так, что появление ошибки н,а выходе усреднителя вызывает такое изменение задержки, при котором ошибка сводится к нулю, т. е. .
Во время записи ) происходит и считы.вание разностного сигнала, и его усреднение, однако этот сигнал является бесполезным, поэтому в конце записи (перед считыванием) соответствующий ему сигнал ошибки сбрасывается. Периодический сброс сигнала ошибки делает схему разностного интегратора безынерционной.
Схема ключевых селекторов 8 состоит из схем совпадения и ключевых диодов.
Схема разверток JO представляет собой два генератора (кадровой .и строчной разверто к), причем первый сипхронизирует второй, и оба они управляются от схемы памяти, что позволяет также сохранить постоянство числа строк при больших изменениях задержки т. Генераторы выполнены на высокостабильных фантастронах в режи.ме самовозбуждения, управляемых по первым сеткам.
Длительность кадра (кадровой пилы) определяет задержку т и, в свою очередь, зависит от измеряемого временного сдвига Тр. При точном измерении т равно Тэ.
Задающий коммутатор // представляет собой триггер, управляемый схемой разверток и управляющий коммутаторами сигналов и ключевым селектором.
Величину задержки т, равную т, снимают на выходе в виде временных интервалов. При этом в случае использования измерителя при корреляционном методе измерения скорости летательного аппарата частота следования циклов регулирования F пронорциональна скорости и, т. е.
F K,-v,(1)
что упрощает задачу измерения скорости. Подсчитывают число ЯА/ циклов (импульсов) регулирования счетчиком за время Д, получают величину, пропорциональную расстоянию RAt, которое было пройдено летательным аппаратом за это время:
RAt /Со HAt.
(2)
Коэффициенты KI и /сг в фор.мулах (1) и (2) связаны с величиной . базы антенн корреляционного измерителя скорости и ее поворотом относительно линии пути.
Для осуществления поиска области задерл ки, где pi2 (т) превышает определенный уровень, в устройство введена схема поиска 12.
При работе в режиме поиска переключатели 13, 14, 15 находятся в положении б, в неработающем состоянии -в положении а. Из схемы поиска переключатель вводят в схему памяти по задержке медленно изменяющийся аналог задержки т, а выход ключевого селектора подключают к индикатору выхода. Так как дифференцирующее звено в режиме поиска отключено, на выходе ключевого селектора при появляются униполярные импульсы, указывающие на вхождение в область задержки с отличной от нуля степенью корреляции сигналов.
При этом схему поиска отключают, включают дифференцирующее звено, и схема вновь переходит в режим слежения за измеряемой величиной TO.
Пред мет изобретения
Одноканальный автоматический электронный измеритель временного сдвига случайных коррелированных сигналов, содержащий приемник с фильтром, дифференцирующим звеном и ограничителем, блок переменной задержки, блок умножения, разностный интегратор и блок управления, отличающийся тем, что, с целью упрощения устройства и повышения точности измерения, блок умножения выполнен в виде потенциалоскопа, соединенного с двусторонним выпрямителем, а для пропускания обоих сигналов по обшему тракту применен входной коммутатор, соединенный с приемником .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического измерения скорости летательного аппарата | 1961 |
|
SU145805A1 |
| Пространственно-временной измеритель диаграммы рассеяния случайной поверхности | 1982 |
|
SU1090137A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ИНФОРМАЦИИ | 1972 |
|
SU357565A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Система автоматического регулирования толщины полосы | 1980 |
|
SU882675A1 |
| Устройство для статистической обработки информации | 1974 |
|
SU525101A1 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |