Щ
4
со со
00 4
j;../ kr
Изобретение относится к машиностроению и может быть использовано в приводах различных машин для бесступенчатого изменения скорости вращения ведомого вала и вращающего момента на нем.
Цель изобретения - расширение кинематических возможностей передачи путем обе спечения реверсирования вращения ведомого вала.
На фиг о 1 изображена предлагаемая бесступенчатая передача, продольный разрез; на фиг.2 - разрез А-А на фиг. 1(е - обозначен эксцентриситет эксцентрика относительно оси веду щего вала) .
Бесступенчатая передача содержит корпус 1,3 котором в подшипниковых узлах установлены соосные.друг другу ведущий 2 и ведомый 3 вальи Эксцентрик 4 размещен на ведущем валу -2 и снабжен механизмом изменения эксцентриситета (не показан). Втулка 5 установлена на эксцентрике 4 в подшипниковых узлах. Первый, второй и дополнительный зубчато-кривошипные преобразователи включают зубчатые центральные колеса 6-8 и сателлиты 9-11, имеющие самотормозящиеся в одном из направлений зацепления, причем направление самоторможения сателлитов 9 и 11 первого и дополнительного преобразователей одинаково и противоположно направлению самоторможения сателлитов 10 второго преобразователя.
Сателлиты 9-11 смонтированы в под шипниковвх узлах в сателлитодержа- телях 12, которые установлены с возможностью вращения, например, в кольцевых направляющих 13, скрепленных с центральными колесами 6-8, и шатунами 14 шарнирно соединены с кривоши пами переменного радиуса, которые могут быть вьтолнены, например, в виде ползунов 15 и 16, размещенных с возможностью радиальных перемеще- ний в направляющих 17 и 18, скреплен ных с втулкой 5. Ползуны 15 и 16 связаны с системой управления (не показана), при этом ползун 15 является общим для кривошипов первого и дополнительно преобразователей.
Центральные колеса 6 и 7 соответственно первого и второго преобразователей размещены на ведомом валу 3 и связаны с ним управляемыми муфтами 19 и 20, а центральное колесо 7
5
0
5
0
5
0
5
0
5
связано управляемым тормозом 21 с корпусом 1. Центральное колесо 8 дополнительного преобразователя размещено на ведущем валу 2 и управляемым тормозом 22 связано с корпу- сом 1. Пружины 23 соединены своими концами с шатунами 14 и направляющими 17 и 1 Во
Бесступенчатая передача работает следующим образом.
Для работы на прямом ходу включаются муфта 19 и тормоз 21 и выключаются муфта 20 и тормоз 22, а также фиксируется положение ползунов 15 и 16 в направляющих 17 и 18 и эксцентриситет эксцентрика 4 относительно ведущего вала 3. При вращении ведущего вала 2, например, по часовой стрелке втулка 5 с направляющими 17 и 18 и зафиксированными в них ползунами 15 и 16 совершает сложное движение, вращаясь вместе с ведущим валом 2 относительно его оси и вращаясь в подшипниковых узлах относительно эксцентрика 4. Ползуны 15 и 16 эксцентричны ведущему валу 2, поэтому скорость их относи- .тельно ведущего вала 2 непрерьшно меняется и в каждый момент нремени наибольшую и наименьшую скорость имеют ползуны 15 и 16, находящиеся соответственно на максималБНом и MHPIH- мальном расстояниях от оси ведущего вала 2, а остальные ползуны 15 и 16, находящиеся на промежуточных расстояниях от указанной оси, имеют промежуточные скорости.
Сателлитодержатели 12 с размещенными в них сателлитами 9 и 10 шарнирно связаны шатунами 14 с ползунами 15 и 16 и поэтому, когда один из ползунов 15 имеет наибольшую, а один из ползунов 16 наименьшую скорость относительно ведущего вала 2, связанные с указанными ползунами 15 и 16 сателлиты 9 и 10 имеют соответственно наибольшую и наименьшую скорости относительно центральных колес 6 и 7. Поэтому указанные сателлиты 9 и 10 самотормозятся с центральными колесами 6 и а их сателлито- держатели 12 скрепляются с кольцевыми направляющими 13 в единое целое
Направление самоторможения сателлитов 9 и 10 выбрано так, что заторможенные сателлиты 9 передают на центральное колесо 6 вращающий момент, направленный по часовой стрелке, a затс рможенные сатетлиты 10 предают . на цеитра, 1ьное колесо 7 вращающгоЧ момент, направленный против часовой стрелки. Поэтому при самоторможении сателлитов 9 и Ю движение передается с вед лцего вала 2 на ведомый 3 вал кинематической цепью: ведуп1ий вал 2, эксцентрик 4, втулка 5, направляющая 17, ползун 15, шатун 14, сателлитодер- жатель 12, заторможенньа сателлит 9 центральное колесо 6, муфта 19, ведомый вал 3; при этом реактивное усилие передается на корпус 1 кинематической цепью: направляющая 18, ползун 16, шатун 14, сателлитодер- жатель 12, заторможенньй сателлит 10, центральное колесо 7. тормоз 21 корпус 1. Остальные сателлиты 9 и 10, связанные с ползунами 15 и 16, находящимися на промежуточных расстяниях от оси ведущего вала 2, расторможены, их сателлитодержатели 12 вращаются в кольцевых направля- Ю1Ц11Х 13, а пружины 23 обеспечивают выборку зазоров в кинемлт1тческих парах. Тормоз 22 вь.гключен, поэтому центральное колесо 8 и сателлиты 11 дополнительного преобразователя вращаются вхолостую.
При работе бесст атеичатоГ1 передачи ползуны 15 и 16, имеющие в каждый момент времени наибольшую и наи меньщую скорость, постоянно меняют ся, в результате чего каждьпЧ из сателлитов 9 и 10 последовательно самотормозится и растормаживается с центральными кoлeca o 6 и 7, а ведомый вал 3 получает однонаправленные (по часовой стрелке) импульсы вращающего момента, под де11ствием которых вращается по часовой стрелке с заданной скоростью.
Для изменения скорости вращения ведомого вала 3 по команде от системы управления (не показана) изменяются эксцентриситет эксцентрика 4 и положение ползунов 15 и 16 в направляющих 17 и 18. При этом Изменяется расстояние , (фиг. 2) между осями втулки 5 и вед щего вала 2, т.е. длина ведугцего кривошипа первого и второго преобразователей, а также изменяются расстояни до скрепленных с гголзунами 15 и 16 осей шарниров шатунов 14, т„е. 7У1И- ны кривощипов переменного радиуса первого и второго преобразователей.
5
0
0
При изменент ллин кпт т птгтп1ов nsNte- няется закон движеюш втулки 5, направляющих 17 и 18, ползунов 15 и 16 и сателлитодержателей 12, поэтому изменяется скорость и продолжительность взаимодействия заторможенных сателлитов 9 и 10 с центральными колесами 6 и 7 и, следовательно, скорость вращения ведомого вала 3.
Для реверсирования вращения ведомого вала 3 выключаются муфта 19 и тормоз 21 и включаются муфта 20 и тормоз 22. Тогда при в paщel ш вед
5 щего вала 2, например, по часовой стрелке втулка 5, направляющие 17 и 18 и ползуны 15 и 16 совершают сложное неравномерное дв гжение относительно ведомого вала 2, связанные с ползунами 15 и 16 caтeллиtoдepжa- тели 12 также неравноГ {ерно вращаются относительно центральных колес 7 и 8, в результате чего сателлиты 10 и 11 периодически ускоряются (за5 медляются) относительно центральных колес 7 и 8 и также период}гчески самотормозятся (растормаживаются) с н ими.
При самоторможении сателлитов 10 и 11 движение передается с ведущего 2 на ведом1 1й 3 вал кинематической цепью: ведущий вал 2, эксцентрик 4, втулка 5, направляющая 18, 16, шатун 14, сателлитодержатель 12, заторможенный сател. 10, центральное колесо 7, муфта 20, ведомл ват 3, при этом реактивное усилие передается на корпус 1 кинсмат1гческой цепью: направляющая 17, ползун 15, шатун 14, сателлитодержатель 12, заторможенный сателлит 11, центральное колесо 8, тормоз 22, корпус 1.
Заторможенные сателлиты 10 передают на центральное : колесо 7 вра- п(ающий момент, направленный против чггсовой стрелки, поэтому при пери- од тческом самоторможении сателлитов 10 и 11 с центральными колесами 7 и 8 ведомый вал 3 получает однонаправленные (против часовой стрелки) импульсы вращающего момента, под действием которых вращается против часовой стрелки с заданной скоростью.
Для изменения скорости вращения ведомого вала 3 на режиме реверсирования по команде от системы управления (не показана) изменяются эксцентриситет эксцентрика 4 и положение ползунов 15 и 16 относительно
0
5
0
5
0
5
направляющих 17 и 18. Процесс изменения скорости осуществляется аналогично описанному.
Таким образом, в предлагаемой передаче обеспечивается изменение направления (реверсирование) вращения ведомого вала на ходу.
Формула изобретения Бесступенчатая передача, содержащая корпус, соосные ведущий и ведомый валы, расположенный на ведущем валу эксцентрик, связанный с ним механизм изменения эксцентриситета, установленную на эксцентрике с возможностью вращения втулку, первый и второй зубчато-кривощипные преобразователи, каждый из которых включает зубчатое центральное колесо, сателлитодержатель с сателлитами, имеющими с центральным колесом само- тортиозящие в одном из направлений зацепления, и кинематически связанный с сателлитодержателен и с втулкой кривошип переменного радиуса, отличающаяся тем, что.
с целью расишрения кинематических возможностей путем обеспечения реверсирования вращения ведомого вала, она снабжена двумя управляемыми муфтами, двумя управляемыми тормозами и дополнительным зубчато-кривошипным преобразователем, включающим зубчатое центральное колесо, связан-
ное с одним из тормозов, сателлитодержатель с сателлитами, имеющими с центральным колесом самотормозящиеся в одном из направлений зацепления, и шатун, шарнирно связанный с
сателлитодержателем и кривошипом переменного радиуса первого преобразователя, центральные колеса первого и второго преобразователей связаны каждое одной из муфт с ведомым валом, центральное колесо второго преобразователя связано также с другим тормозом, а направление самоторможе-, ния сателлитов и первого и дополнительного преобразователей одинаково
и противоположно направлению самоторможения сателлитов второго преобразователя о

| название | год | авторы | номер документа |
|---|---|---|---|
| Бесступенчатая передача | 1986 |
|
SU1364804A1 |
| Импульсная передача | 1985 |
|
SU1293430A1 |
| Инерционная передача | 1989 |
|
SU1633211A1 |
| Инерционная бесступенчатая передача | 1976 |
|
SU742654A1 |
| Инерционная бесступенчатая передача | 1978 |
|
SU821824A1 |
| Выпрямитель момента импульсного механизма | 1980 |
|
SU905554A1 |
| Выпрямитель момента импульсного механизма | 1984 |
|
SU1260621A1 |
| Импульсная передача | 1985 |
|
SU1295107A1 |
| Выпрямитель момента импульсного механизма | 1989 |
|
SU1656249A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1997 |
|
RU2105214C1 |
Изобретение относится к машиностроению. С целью расширения кинематических возможностей путем обеспечения реверсирования вращения ведомого вала в бесступенчатой передаче при вращении ведущего вала 2 и включенных муфте 19 и тормозе 21 втулка 5 с направляющими 17 и 18 и ползунами 15 и 16 совершает сложное движение. При этом сателлиты 9 и 10, связанные шатунами 14 с ползунами 15 и 16, имеют переменные скорости вращения относительно центральных колес 6 и 7 и самотормозятся с центральными колесами, а их сателлитодержатели 12 скрепляются с направляющими 13 в единое целое, и ведомый вал 3 получает однонаправленные импульсы вращающего момента. Для реверсирования вращения ведомого вала 3 включаются муфта 20 и тормоз 22. При этом неравномерно вращаются сателлиты 10 и 11 и периодически самотормозятся с центральными колесами 7 и 8. Импульсы вращающего момента от центрального колеса 7 через муфту 20 передаются ведомому валу, а реактивный момент через тормоз 22 передается на корпус 1. Изменение скорости вращения ведомого вала осуществляется путем изменения эксцентриситета эксцентрика 4. 2 ил.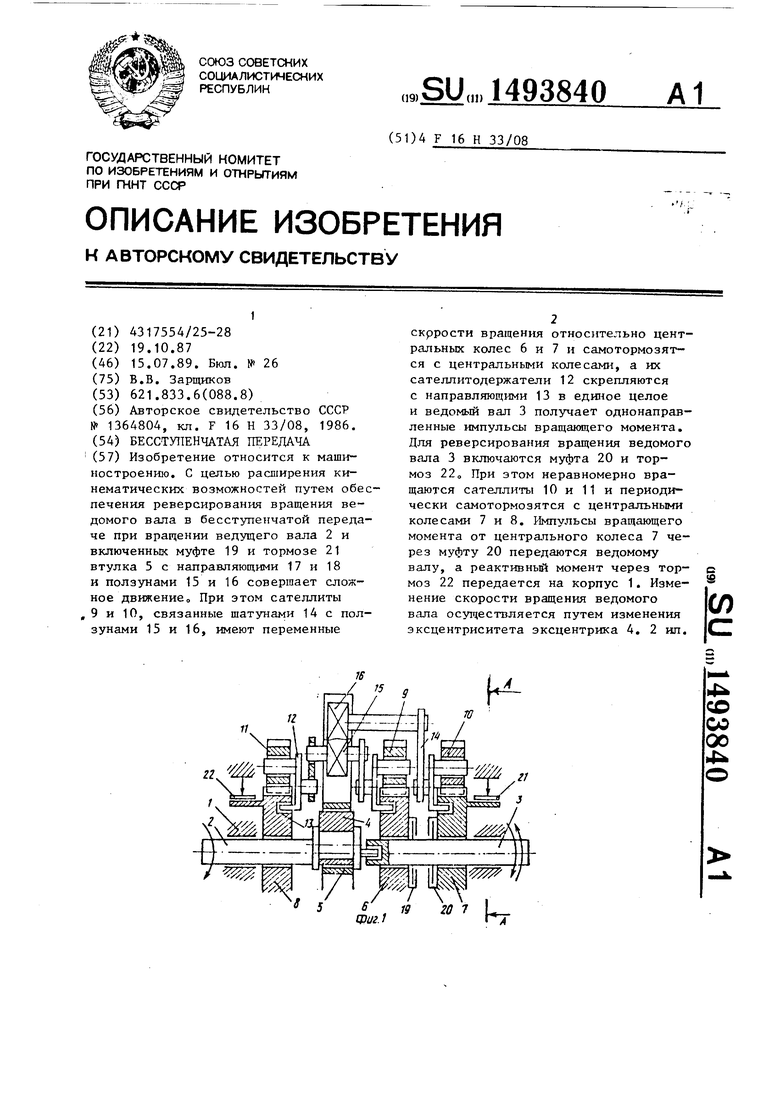
и
7
15
| Бесступенчатая передача | 1986 |
|
SU1364804A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
