Изобретение относится к машиностроению и может быть использовано в импульс- ных передачах для преобразования знакопеременного вращающего момента в знакопостоянный, т.е. в качестве выпрямителя момента.
Цель изобретения - уменьшение радиальных габаритов.
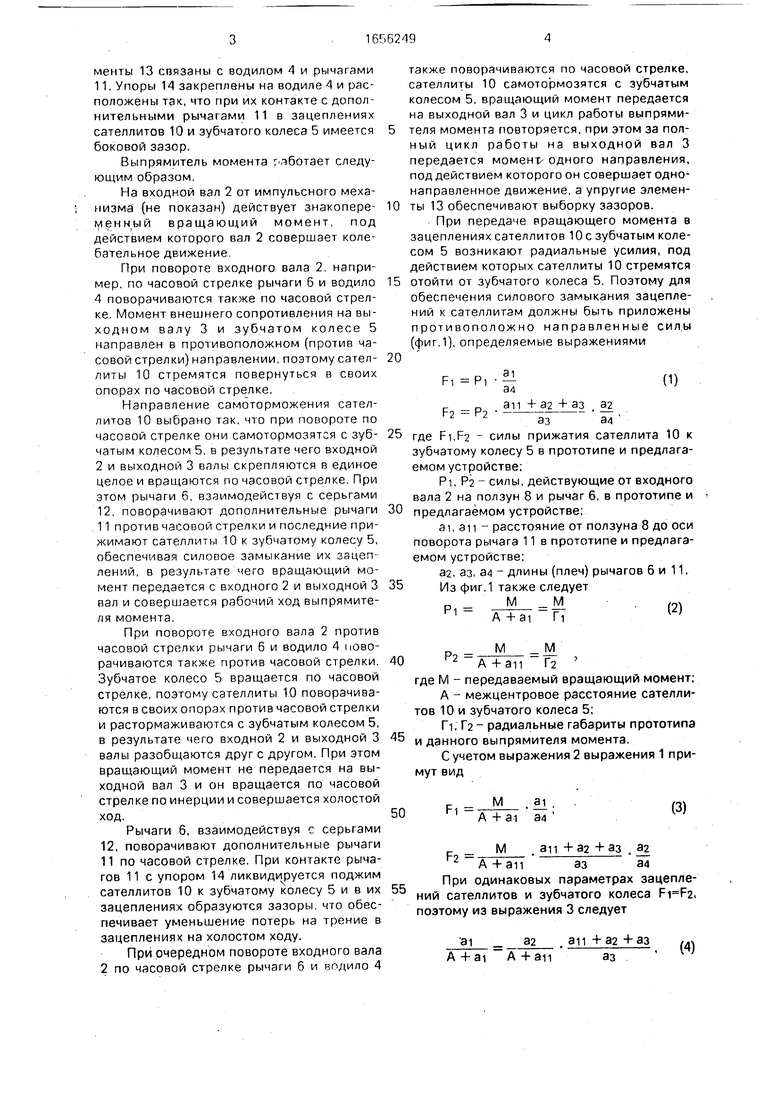
На фиг. 1 изображена кинематическая схема выпрямителя момента; на фиг.2 - то же, вид спереди.
Выпрямитель момента импульсного механизма содержит корпус 1, в котором размещены соосные один другому входной 2 и выходной 3 валы.
На валу 3 установлено с возможностью вращения водило 4 и закреплено зубчатое колесо 5. Рычаги 6 одними концами соединены шарнирно с водилом 4 и другими концами связаны с валом 2 шарнирно с возможностью радиального перемещения, например посредством пальцев 7 и ползунов 8. размещенных в направляющих 9. скрепленных с входным валом 2.
Сателлиты 10 имеют самотормозящиеся в одном из направлений зацепления с зубчатым колесом 5 и установлены в опорах на дополнительных рычагах 11. которые соединены шарнирно с водилом 4.
Серьги 12 своими концами соединены шарнирно с рычагами 6 и 11. Упругие элеС
ел о
ю
4 О
менты 13 связаны с водилом 4 и рычагами
11.Упоры 14 закреплены на водиле 4 и расположены так, что при их контакте с дополнительными рычагами 11 в зацеплениях сателлитов 10 и зубчатого колеса 5 имеется боковой зазор.
Выпрямитель момента олботает следующим образом.
На входной вал 2 от импульсного механизма (не показан) действует знакопеременный вращающий момент, под действием которого вал 2 совершает колебательное движение
При повороте входного вала 2, например, по часовой стрелке рычаги 6 и водило 4 поворачиваются также по часовой стрелке. Момент внешнего сопротивления на выходном валу 3 и зубчатом колесе 5 направлен в противоположном (против часовой стрелки) направлении,поэтому сателлиты 10 стремятся повернуться в своих опорах по часовой стрелке.
Направление самоторможения сателлитов 10 выбрано так, что при повороте по часовой стрелке они самотормозятся с зубчатым колесом 5. в результате чего входной 2 и выходной 3 валы скрепляются в единое целое и вращаются по часовой стрелке. При этом рычаги б, взаимодействуя с серьгами
12.поворачивают дополнительные рычаги 11 против часовой стрелки и последние прижимают сателлиты 10 к зубчатому колесу 5, обеспечивая силовое замыкание их зацеп лений, в результате чего вращающий момент передается с входного 2 и выходной 3 вал и совершается рабочий ход выпрямителя момента.
При повороте входного вала 2 против часовой стрелки рычаги 6 и водило 4 поворачиваются также против часовой стрелки. Зубчатое колесо 5 вращается по часовой стрелке, поэтому сателлиты 10 поворачиваются в своих опорах против часовой стрелки и растормаживаются с зубчатым колесом 5, в результате чего входной 2 и выходной 3 валы разобщаются друг с другом. При этом вращающий момент не передается на выходной вал 3 и он вращается по часовой стрелке по инерции и совершается холостой ход.
Рычаги б, взаимодействуя с серьгами 12, поворачивают дополнительные рычаги 11 по часовой стрелке. При контакте рычагов 11 С упором 14 ликвидируется поджим сателлитов 10 к зубчатому колесу 5 и в их зацеплениях образуются зазоры, что обеспечивает уменьшение потерь на трение в зацеплениях на холостом ходу.
При очередном повороте входного вала 2 по часовой стрелке рычаги 6 и водило 4
0
5
0
также поворачиваются по часовой стрелке, сателлиты 10 самотормозятся с зубчатым колесом 5, вращающий момент передается на выходной вал 3 и цикл работы выпрямителя момента повторяется, при этом за полный цикл работы на выходной вал 3 передается момент/ одного направления, под действием которого он совершает однонаправленное движение, а упругие элементы 13 обеспечивают выборку зазоров.
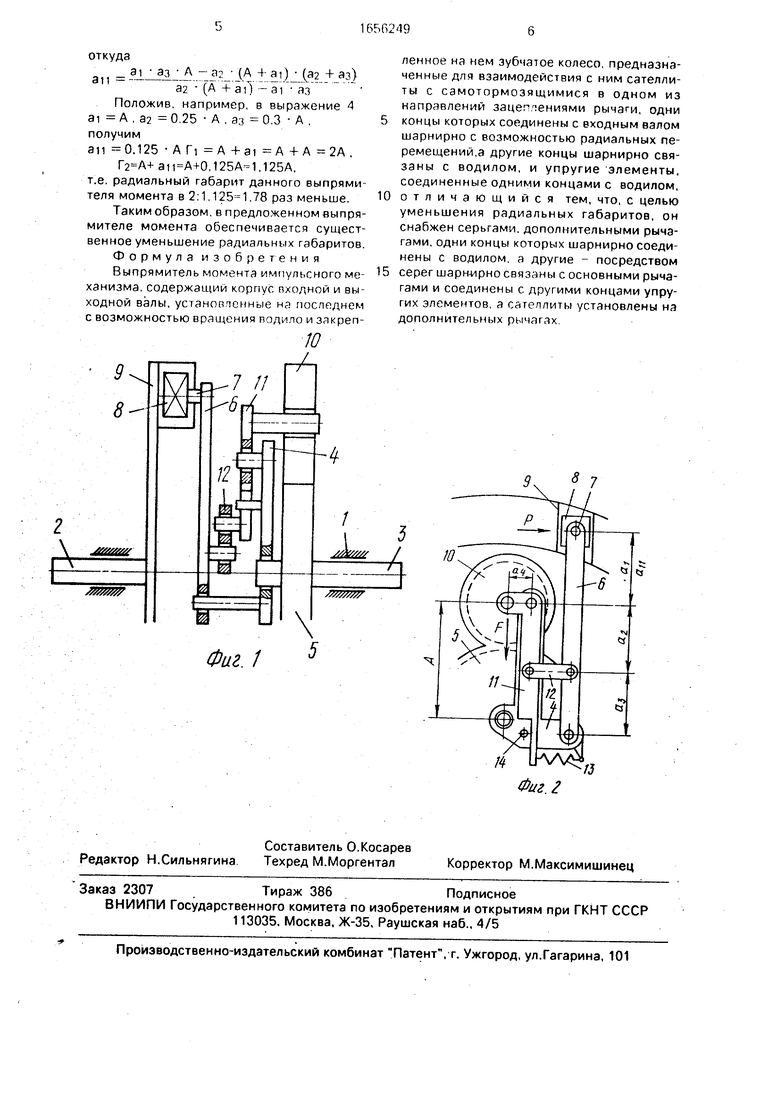
При передаче вращающего момента в зацеплениях сателлитов 10с зубчатым колесом 5 возникают радиальные усилия, под действием которых сателлиты 10 стремятся отойти от зубчатого колеса 5. Поэтому для обеспечения силового замыкания зацеплений к сателлитам должны быть приложены противоположно направленные силы (фиг.1), определяемые выражениями
FT Р,
aj
34
(1)
5
0
5
с о 311+32+33 1-2 - Р2 - аз
32 34
где Fi,F2 - силы прижатия сателлита 10 к зубчатому колесу 5 в прототипе и предлагаемом устройстве;
Pi, P2 силы, действующие от входного вала 2 на ползун 8 и рычаг 6, в прототипе и предлагаемом устройстве;
ai, an - расстояние от ползуна 8 до оси поворота рычага 11 в прототипе и предлагаемом устройстве;
32, аз, 34 - длины (плеч) рычагов 6 и 11.
Из фиг.1 также следует
Р.- т г-2И
A+ai П
Р2
м
м
Г2
А +311 где М - передэваемый вращающий момент;
А - межцентровое расстояние сателлитов 10 и зубчатого колеса 5;
П. Г2 - радиальные габариты прототипа и данного выпрямителя момента.
С учетом выражения 2 выражения 1 примут вид
Fi
М . Н А + ai 34
(3)
F2 .
М
311 +32+33
32 34
А+311эз
При одинаковых парэметрэх зацеплений сателлитов и зубчатого колесэ , поэтому из выражения 3 следует
32
А + аи
аи + 32 + аз аз
(4)
an
откуда
- aJ. (А Э2 (A + а Г) - a i аз
Положив, например, в выражение 4 ai A , 32 0 25 А . э; 0.3 А . получим аи 0.125 A Ti A+ai .
,125А- 1,125А, т.е. радиальный габарит данного выпрямителя момента в 2:1,125-1,78 раз меньше.
Таким образом, в предложенном выпрямителе момента обеспечивается существенное уменьшение радиальных габаритов.
Формула изобретения
Выпрямитель момента импульсного механизма, содержащий корпус входной и выходной валы, установпенные на последнем с возможностью вращения водило и закреп0
5
ленное на нем зубчатое колесо, предназначенные для взаимодействия с ним сателлиты с самотормозящимися в одном из направлений зацеп-тениями рычаги, одни концы которых соединены с входным валом шарнирно с возможностью радиальных перемещений.а другие концы шарнирно связаны с водилом, и упругие элементы, соединенные одними концами с водилом, отличающийся тем, что, с целью уменьшения радиальных габаритов, он снабжен серьгами, дополнительными рычагами, одни концы которых шарнирно соединены с водилом, а другие - посредством серег шарн-ирно связаны с основными рычагами и соединены с другими концами упругих элементов, а сателлиты установлены на дополнительных рычагах
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсная передача | 1985 |
|
SU1293430A1 |
| Выпрямитель момента импульсного механизма | 1984 |
|
SU1260621A1 |
| Обгонный механизм | 1988 |
|
SU1638396A1 |
| Импульсная передача | 1985 |
|
SU1295107A1 |
| Выпрямитель момента импульсного механизма | 1980 |
|
SU905554A1 |
| Бесступенчатая передача | 1987 |
|
SU1493840A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ КАТАНКИ ОТ ОКАЛИНЫ | 1998 |
|
RU2149725C1 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
Изобретения относится к машиностроению. С целью уменьшения радиальных габаритов выпрямителя момента импульсного механизма при действии на входной вал 2 знакопеременного вращающего момента направление самоторможения сателлитов 10 выбрано так, что при повороте входного вала 2 по часовой стрелке сателлиты 10 самотормозятся с зубчатым колесом 5, в результате чего входной 2 и выходной 3 валы скрепляются и так же вращаются почасовой стрелке. При этом силовое замыкание зацеплений обеспечивается рычагами 6, серьгами 12 и дополнительными рычагами 11. При повороте входного вала 2 против часовой стрелки сателлиты 10 поворачиваются в своих опорах и растормаживаются, в результате чего входной 2 и выходной 3 валы разобщаются и обеспечивается режим холостого хода при циклических изменениях направления вращения входного вала 2, выходной вал 3 совершает однонаправленное движение. Наличие дополнительных рычагов 11с установленными на них сателлитами 10 обеспечивает силовое замыкание зацеплений при меньших радиальных силах прижатия сателлитов 10 к зубчатому колесу 5, что позволяет уменьшить радиальные габариты выпрямителя момента. 2 ил.
Фиг. 1
8
/4
| Выпрямитель момента импульсного механизма | 1984 |
|
SU1195096A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
