о
У1
Ci
00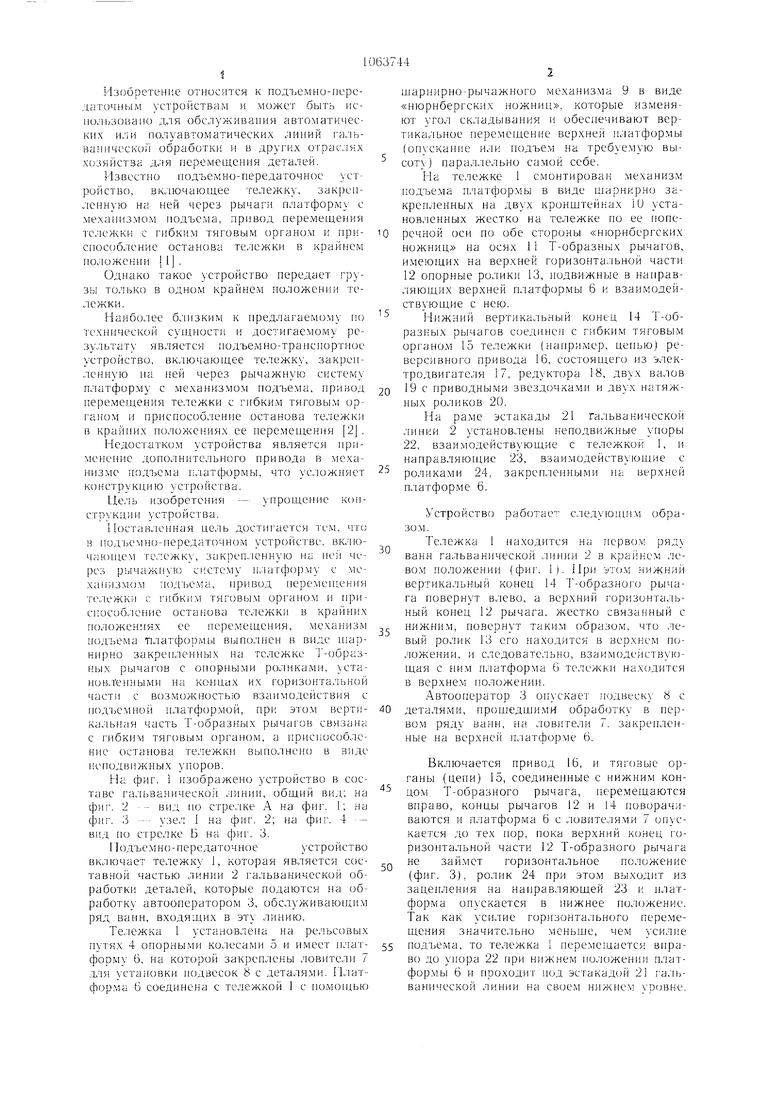
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи досок в деревообрабатывающий станок | 1981 |
|
SU1014710A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Грузоведущий конвейер | 1989 |
|
SU1747355A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ НЕСИНХРОННЫХ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1993 |
|
RU2083349C1 |
ИОДЪЕЛиЮ-ПЕРЕД.АТОЧНОЕ УС - OrKTBO, включающее тележку, закреплонку ij ia ней через рычажную систему ||.(ат.форму с механизмом подъема, привод перемещения тележки с гибки.м тяговым органом и приспособление останова тележки в крайних положениях ее перемещения, отличающееся тем, что, с целью упрощения конструкции, ме.ханиз.м подъе.ма платформы выполнен в виде шарнирно закрепленных на тележке Т-образных рычагов с опорными роликами, установленными на концах их горизонтальной части с возможностью взаимодействия с платформой, при этом вертикальная часть Т-образных рычагов связана с гибким тяговым органом, а приспособление останова тележки .iнено в виде неподвижных упоров. / ш с:
/
/
21
г
20
J
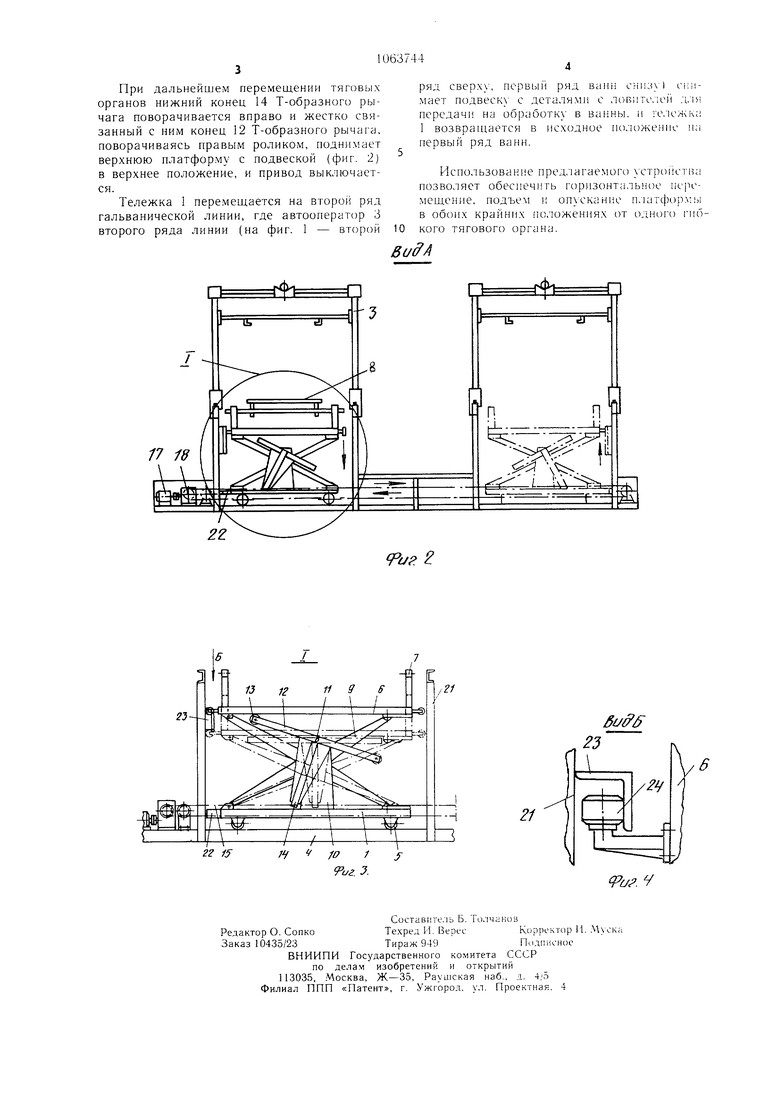
Hsoopereniie относится к подъемно-персдаточным vcTpoHCTsarvi и может быть нсно,л1 зова11о для обсдуживаиия автоматических или полуавтоматических линий га.тьва:П1чс:екой обработки и в других отраслях х(;зяйстза для перемеидения деталей. Известно подъемно-передаточное устройство, вк;1ючаю1цее тележку, закрси„чснную на ней через платформу с механизмом подъема, привод перемещения телелчки с гибким тяговым органом и приспособлсние останова тележки в крайнем положении 11 . Однако такое устройство передает грузы только в одном крайнем положении тележки. Наиболее б.тизким к предлагаемому но технической сундности и л1остигаемому результату является подъемно-трансиортнос устройство, вк,1ючаю1цее тележку, закрепленную на ней через рычажную систему платформу с .механизмом нодъема, нривод пере.мещепия тележки с гибким тяговым органом и приспоеобление останова тележки в крайних ноложениях ее неремещения 2J . Недостатком устройства является применение дополнительного привода в механизме иодъема п.татформы, что усложняет конструкцию устройства. Цель изобретения - упрощение констр кц1н-1 устройства. Ностав.тенная цель достигается тем, что в нодьемно-нередатсучном устройстве, вк.ночающем те,:ежку, закреи.ленную на Hcii через рычажнук; систему и;1атформу с мсханизмо.м 11од1 ел1а, привод неремещеиия т(лежки с гибки:; тяговым органом и приС11особ.1ение останова тележки в крайних положениях ее иере.мещения, .механизм нодъема платформы выполнен в виде iiiapннрно закренленных на тележке Т-образных рычагов с опорными роликами, установленными на концах их горизонтальной части с возможностью взаимодействия с нодьсмной нлатфор.мой, при это.м вертикальная часть Т-образных рычагов связана с гибким тяговым органом, а ирисиособлеиие останова тележки выполнено в виде неподвнжных упоров. Pia фиг, 1 изображено устройство в составе га.Нзваническо линии, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фнг. 3 - узел 1 на фиг. 2; на фиг. 4 вид но стрелке Б на фиг. 3. 1одъем но-передаточноеустройство включает тележку 1, которая является составной частью линии 2 га,льБанической обработки деталей, которые подаются на обработку автооператором 3, обслуживаюп|им ряд ванн, входящих в эту линию. Тележка 1 установлена на рельсовых путях 4 опорными колесами 5 и имеет нла1форму б, на которой закреилены ловители 7 для установки иодвесок 8 с деталя.ми. П.латформа и соединена с тележкой 1 с номонтью шарнирно-рычажного механиз.ма 9 в виде «нюрнбергских ножнин, которые изменяют угол складывания и обеспечивают вертика;1ьное 1еремещение верхней н;1атформы (опускапие или подъем на требуемую высоту) параллельно са.мой себе. На тележке 1 смонтирован механизм иодъе.ма платформы в виде щарнирно закренленных на двух кронщтейнах iU установленных жестко на тележке по ее поперечной оси по обе стороны «нюрнбергских ножниц па осях 11 Т-образных рычагов, имеющих на верхней горизонта.льной части 12 опорные ролики 13, подвижные в нанрав.чяющих верхней платформы 6 и взаимодействующие с нею. Нижний вертикальный конец 14 Т-образных рычагов соединен с гибким тяговым органом 15 тележки {например, ) реверсивного привода 16, состоящего из электродвигате;1я 17, редуктора 18, двух валов 19 с приводными звездочла.ми и двух натяжных роликов 20. На ра.ме эстакады 21 га.тьванической линии 2 установлены неподвижные упоры 22, взаи.модействующие с тележкой 1, и направляющие 23, взаи.модействующие с роликами 24, закрепленными на верхней нлатформе 6. .Устройство работас следуюиьчм образом. Тележка 1 находится на нерво.м ряду ванн гальванической лииии 2 в крайнс.м левом положении (фиг. 1). При это.м нижний вертикальный конец 14 Т-образного рычага повернут влево, а верхний горизонтальный конец 12 рычага, жеетко связанный с нижним, повернут таким образом, что левый ролик 13 его находится в верхнем п(;ложении, и следовательно, взаимодействующая с ни.м нлатформа 6 тележки находится в верхне.м положении. Автоонератор 3 опускает нодвеску 8 с деталями, прощедщими обработку в первом ряду ванн, на ловители 7. закреиленные на верхней илатс)5орме 6. Включается привод 16, и тягоные органы (цепи) 15, соединенные с нижним концом Т-образного рычага, неремешаются вправо, концы рычагов 12 и 14 поворачиваются и платформа 6 с ловителями 7 опускается до тех нор, пока верхний конец горизонтальной части 12 Т-образного рычага не займет горизонтальное положение (фиг. 3), ролик 24 при этом выходит из зацепления на направляющей 23 и нлатформа опускается в нижнее положение. Так как усилие горизонта.тьного нере.мещения значительно .меньще, чем силие иодъема, то тележка I перемещается B ipaво до уиора 22 при нижнем иоложен1 И платформы 6 и проходит КлД эстакадой 21 га:1ьванической линии на нижнем хровне.
При дальнейшем перемещении тяговых органов нижний конец 14 Т-образного рычага поворачивается вправо и жестко связанный с ним конец 12 Т-образного рычага, поворачиваясь правым роликом, поднимает верхнюю платформу с подвеской (фиг. 2) в верхнее положение, и привод выключается.
Тележка 1 перемещается на второй ряд гальванической линии, где автооператор 3 второго ряда линии (на фиг. 1 - второй
ряд сверху, первый ряд ванн снизу) ciiiiмает подвеску с деталями с ловито.юй д.1я передачи на обработку в ванны, и го,1ож1 а 1 возвращается в исходное по.юженнс на первый ряд ванн.
Использование предлагаемого хстройстиа позволяет обеспечить горизонтальное iiejicмсщсние. подъем и опускание п.1атфорл;ы в обоих крайних положениях от одного гибкого тягового органа.
BuffA
П t-4dH
-.
- н
,й .
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для загрузки и разгрузкипОдВЕСНОгО КОНВЕйЕРА | 1978 |
|
SU819005A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Конвейерная система для транспортировки изделий | 1977 |
|
SU747791A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
