;о
tn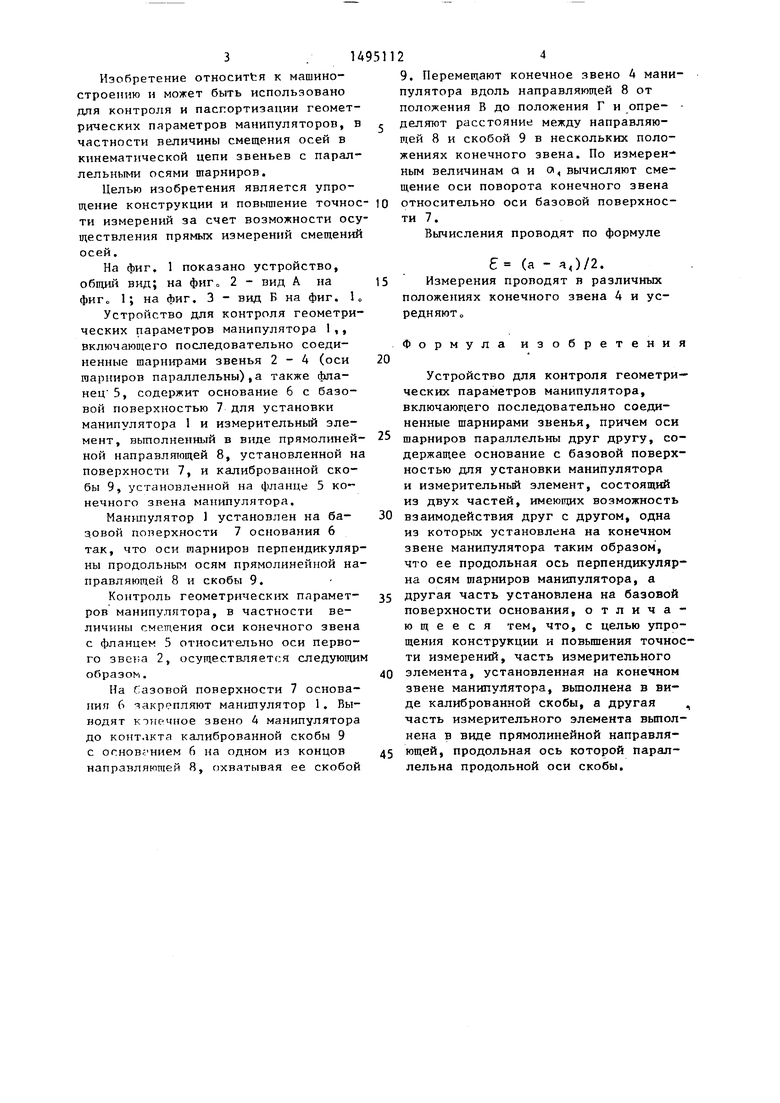
Изобретение относится к машиностроению и может быть использовано для контроля и паспортизации геометрических параметров манипуляторов. Цель изобретения - упрощение конструкции и повышение точности измерений. Испытуемый манипулятор 1, включающий последовательно соединенные шарнирами звенья 2,3,4, устанавливается на базовую поверхность 7 основания 6 так, что оси его шарниров перпендикулярны продольной оси измерительного элемента. Устройство для контроля геометрических параметров манипуляторов снабжено калиброванной скобой 9, установленной на фланце 5 конечного звена 4 манипулятора, и прямолинейной направляющей 8, установленной на основании 6. При перемещении конечного звена 4 со скобой 9 вдоль направляющей 8 производят измерения расстояния между скобой и направляющей, по которому судят о смещении осей звеньев. 3 ил.
; 5
Фиг.1
Целью изобретения является упрощение конструкции и повышение точное ти измерений за счет возможности осуществления прямых измерений смещений осей.
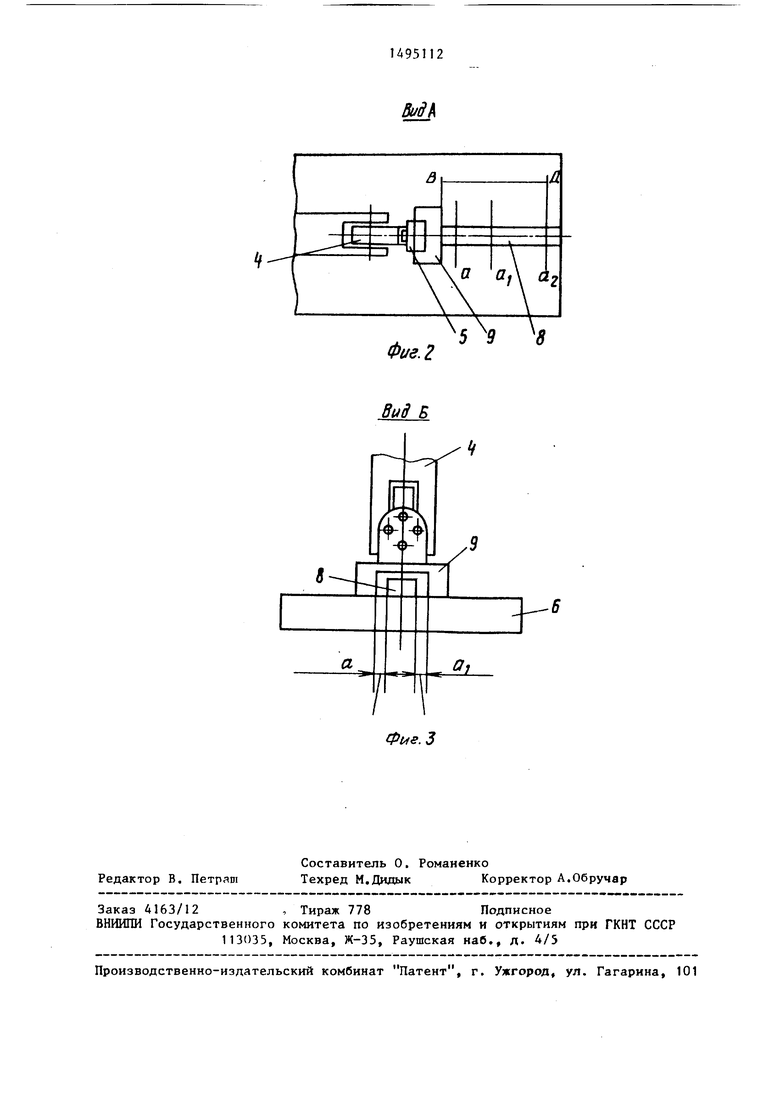
На фиг. 1 показано устройство, общий вид; на фиг„ 2 - вид А на фиго 1; на фиг. 3 - вид Б на фиг. „ Устройство для контроля геометрических параметров манипулятора 1,, включаюпхего последовательно соединенные шарнирами звенья 2-4 (оси шарниров параллельны),а также фланец 5, содержит основание 6 с базовой поверхностью 7 для установки манипулятора 1 и измерительный элемент, вьтолненный в виде прямолинейной направляющей 8, установленной на поверхности 7, и калиброванной скобы 9, установлйнной на фланце 5 конечного звена манипулятора.
Манипулятор установлен на базовой поверхности 7 основания 6 так, что оси шарниров перпендикулярны продольным осям прямолинейной направляющей 8 и скобы 9.
Контроль геометрических параметров манипулятора, в частности величины смегщения оси конечного звена с фланцем 5 относительно оси первого звеиа 2, осуществляется следующим образом.
На базовой поверхности 7 основания 6 закрепляют манипулятор 1. Выводят кттгечное звено 4 манипулятора до контакта калиброванной скобы 9 с основг нием 6 на одном из концов направляющей 8, охватывая ее скобой
24
Вычисления проводят по формуле
(а - а,)/2.
Измерения проводят в различных положениях конечного звена 4 и усредняют
Формула изобретения
Устройство для контроля геометрических параметров манипулятора, включающего последовательно соединенные шарнирами звенья, причем оси шарниров параллельны друг другу, содержащее основание с базовой поверхностью для установки манипулятора и измерительный элемент, состоящий из двух частей, имеющих возможность взаимодействия друг с другом, одна из которых установлена на конечном звене манипулятора таким образом, что ее продольная ось перпендикулярна осям шарниров манипулятора, а другая часть установлена на базовой поверхности основания, отличающееся тем, что, с целью упрощения конструкции и повьппения точности измерений, часть измерительного элемента, установленная на конечном звене манипулятора, вьшолнена в виде калиброванной скобы, а другая , часть измерительного элемента выполнена в виде прямолинейной направляющей, продольная ось которой параллельна продольной оси скобы.
ff
a
ал d
Фие.2
5 8
BuS Б
.3
| Способ аттестации геометрических параметров механической руки промышленного робота | 1984 |
|
SU1258689A1 |
