Ц-л)Орете11не относится к машино- строеиию я может быть использовано при г.о-чдлпии различных робототехнических систем.
ц,.|ц.и изобретения является повышение динамической точности при вариациях параметров объекта регулиро- вяяия.
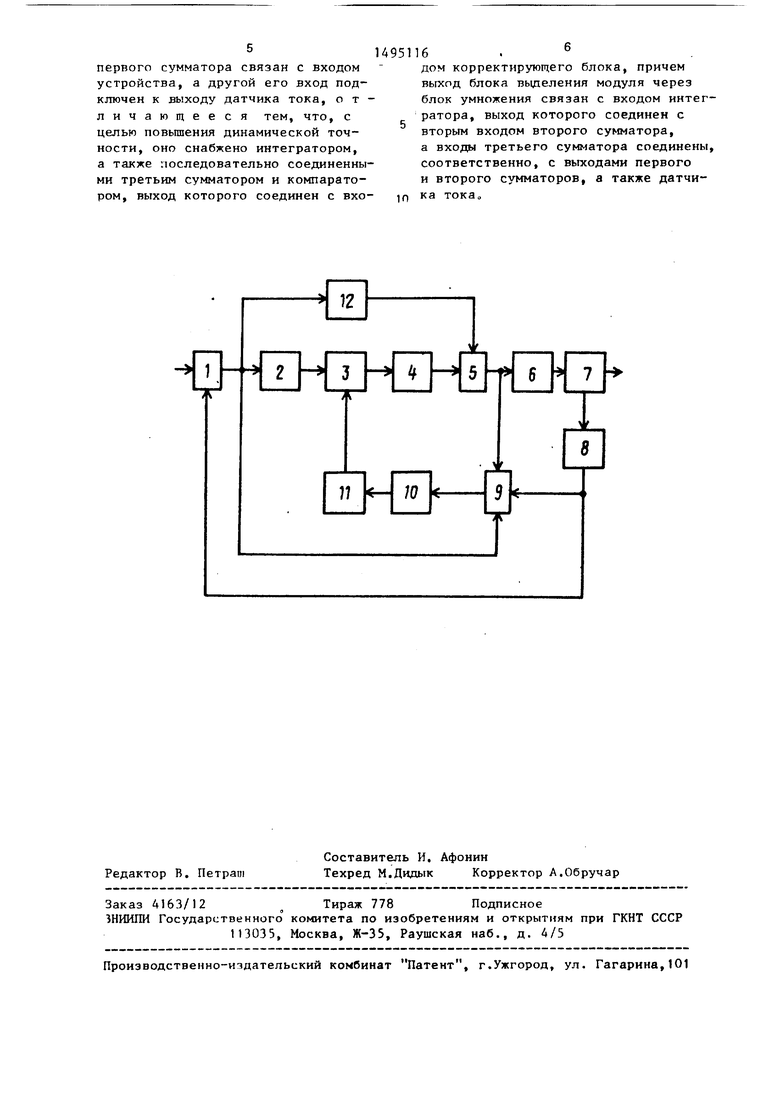
11-1 4ej) представлена функцио- 1глльная схр.ма устройства.
V.-i pi4ic rnd содержит первый сум- :мг,11) 1, блок 2 выделения модуля, г:,,:-,- 3 v lloxoния, интегратор 4, вто- .oi гvM b iTor 5, усилитель 6 мощности, лг;к г п(1-1ри1-чтоль 7, датчик 8 тока.
третий сумматор 9, компаратор 10, корректирующий блок 11, усилитель 12.
Устройство работает следующим образом.
На вход устройства (на вход сумматора 1) подается сигнал заданного значения тока электродвигателя, например, от регулятора скорости. Сигнал с датчика 8 тока, пропорциональный величине тока, протекающего через якорную обмотку электродвигателя, поступает на второй вход сумматора 1 о Сигнал рассогласования между заданным и действительным значениями тока, определяемый в суммаf
Х
:п
J5
314
торе 1, усиливается в «.усилителе 12 и через второй сумматор 5 и усилитель 6 мощности поступает на электродвигатель 7, вызывая изменение тока в его якорной обмотке
Модуль сигнала рассогласования с выхода блока 2 выделения модуля поступает на второй вход блока 3 умножения, где умножается на сигнал управления контура регулирования операторной переменной, который состоит из третьего сумматора 9, компаратора 10 и корректирующего блока 1 1 .
Выходной сигнал блока умножения поступает на вход интегратора 4, выходной сигнал которого является интегральной составляющей сигнала уп- оавления электродвигателем„ В сумма- торе 5 осуществляется суммирование пропорциональной и интегральной составляющих сигнала управления.
Рассмотрим подробно формирование сигнала управления контура ре- гулирования операторной переменной при обработке скачкообразного входного воздействия.
Выходной сигнал третьего сумматора 9 имеет вид
и и, + К
Us - Mg,
где и,, Ug,
Ug и U - соответственно выход- ные напряжения блоков 1, 5, 8 и 9;
К, и К - коэффициенты усиления третьего сумматора 9 по соответствую- щему входу о
При подаче на вход устройства сигнала Tima 1 (t) напряжение на выходе третьего сумматора 9 положительно, следовательно, и сигнал на выходе 1:омпаратора 10, реализующего функат-по
т.е. и,(,
и,о signUq, + 1, U()0 - 1, U,: 0.
Входной сигнал поступает ня вход коррг ктирукчдгч о блока 11, реализую- 1дег(1 пгт еплточную функцию вида
1
W(p)
5
0
5
0
5
0
0
5
причем Т ,
I fl где Т -- - электромагнитная посто янная времени электродвигателя .
Сигнал на выходе корректирующего блока начинает плавно возрастать, увеличивая сигнал, поступающий на вход интегратора 4, а следовательно, и величину интегральной составляющей,
В процессе отработки устройством заданного значения тока уменьшается сигнал рассогласования U, увеличивается значение выходной координаты Ug и сигнал на выходе сумматора 9 изменяет свой знак. Изменение знака и приводит к изменению знака выходного напряжения компаратора 10, и выходной сигнал корректирующего блока 11 начинает плавно уменьшаться, уменьшая тем самым интегральную составляющую сигнала управления электро- двигателеМс
При дальнейшей отработке заданного значения изменяется знак интегральной составляющей, что приводит к уменьшению значения сигнала управления электродвигателем по мере приближения выходной координаты к заданному значению, в результате чего повышается динамическая точность устройства.
В установившемся режиме работы в устройстве устанавливается некоторый постоянный коэффициент интегральной составляющей.
В случае изменения сопротивления R. изменяется момент изменения знака сигнала U, Тое,, изменяется весовой коэффициент интегральной составляющей сигнала управления электродвигателем, обеспечивая тем самым инвари- антность показателей качества переходного процесса к изменению сопро- тив ления якорной цепи электродвигателя.
Формула изобретения
Устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, усилитель, второй сумматор, усилитель мощности, электродвигатель и датчик тока, последовательно соединенные корректирующий блок и блок умножения, а также блок вьщеления модуля, вход которого подключен к выходу первого сумматора, при этом один из входов
первого сумматора связан с входом устройства, а другой его вход подключен к выходу датчика тока, о т личающееся тем, что, с целью повьппения динамической точности, оно снабжено интегратором, а также последовательно соединенны ми третьим сумматором и KONmapaTO- ром, выход которого соединен с вхо
495116.
дом корректирующего блока, причем выход блока выделения модуля через блок умножения связан с входом интегратора, выход которого соединен с вторым входом второго сумматора,
а входы третьего сумматора соединены, соответственно, с выходами первого и второго сумматоров, а также датчи- р ка токао
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом робота | 1988 |
|
SU1580317A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнических системах. Целью изобретения является повышение динамической точности устройства. Устройство содержит контур регулирования тока электродвигателя, который образован последовательно соединенными первым сумматором, усилителем, вторым сумматором, усилителем мощности, электродвигателем и датчиком тока, а также контур регулирования операторной переменной, который состоит из последовательно соединенных третьего сумматора, компаратора и корректирующего блока. Сигнал корректирующего блока перемножается с модулем сигнала рассогласования контура регулирования тока, а затем интегрируется и подается в контур регулирования тока. В зависимости от изменения параметров объекта регулирования, например при изменении сопротивления якорной цепи электродвигателя, изменяется весовой коэффициент интегральной составляющей сигнала управления электродвигателем, чем достигается инвариантность устройства к этим изменениям. 1 ил.
| Справочное пособие по теории систем автоматического регулирования и управления | |||
| Под ред | |||
| ЕаА„Сан- ковскогОо - Минск: Вьшейшая школа, 1973, с | |||
| Открытка или конверт | 1925 |
|
SU515A1 |
| ПоП „ | |||
