Изобретение относится к автоматическому управлению и может быть использовано, например, при создании различных робототехнических систем.
Целью изобретения является повышение динамической точности управления приводным электродвигателем при вариациях параметров электродвигателя и изменении момента нагрузки на выходном валу электродвигателя.
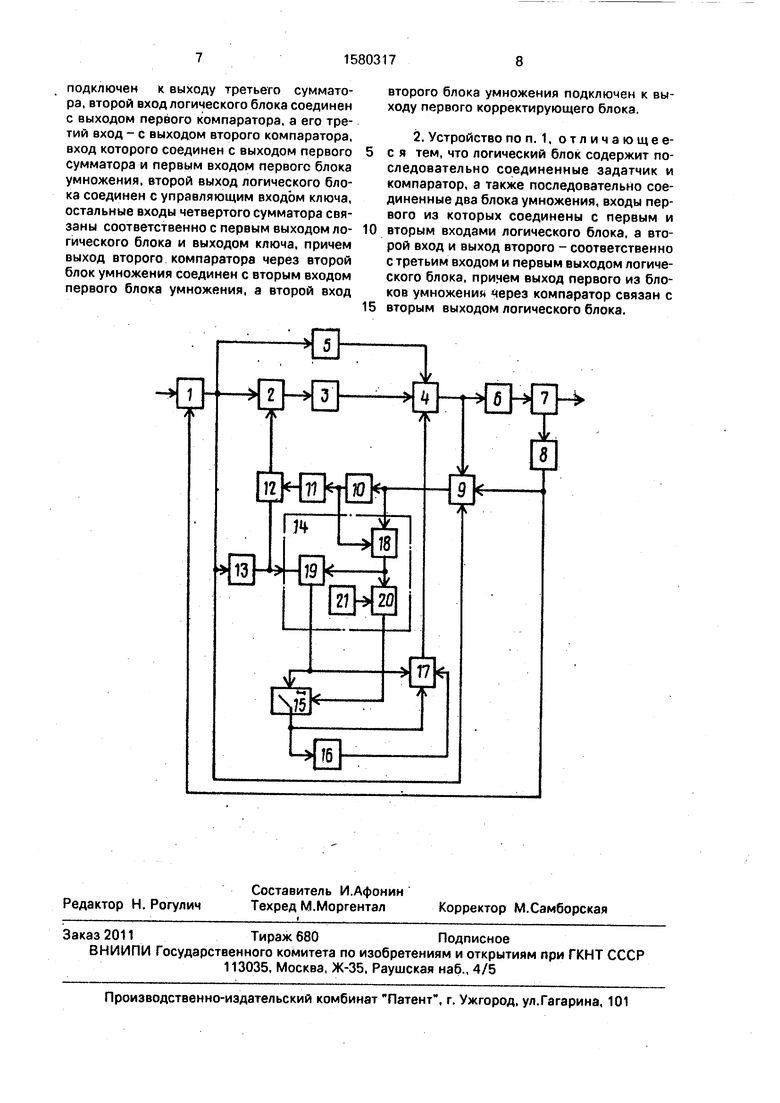
На чертеже представлена схема устройства.
Устройство содержит первый сумматор 1, первый блок 2 умножения, интегратор 3, второй сумматор 4, усилитель 5, усилитель 6
мощности, приводной электродвигатель 7, датчик 8 тока, третий сумматор 9, первый компаратор 10, первый корректирующий блок 11, второй блок 12 умножения, второй компаратор 13, логический блок 14, ключ 15, второй корректирующий блок 16 и четвертый сумматор 17.
Логический блок 14 содержит блоки 18 и 19 умножения, компаратор 20 и задатчик21.
Устройство работает следующим образом.
На первый вход первого сумматора 1 подается сигнал заданного значения тока электродвигателя, например, от регулятора
ел
00
о
со
VJ
скорости. Сигнал с датчика 8 тока, пропорциональный величине тока, протекающего через якорную обмотку электродвигателя, поступает на второй вход первого сумматора 1, Сигнал рассогласования между заданным и действительным значением тока, определяемый в сумматоре 1, усиливается в усилителе 5 и через второй сумматор 4 и усилитель 6 мощности поступает на объект управления - электродвигатель 7 (постоянного тока), вызывая увеличение тока в его якорной обмотке.
Выходной сигнал третьего сумматора 9 имеет вид
Ug Ul+KlU4-K2U8,
где Ki, «2 - коэффициенты усиления третьего сумматора по соответствующему входу, которые выбираются исходя из параметров электродвигателя 7 и усилителя 6 мощности;
Ui, LM, Us и Ug - соответственно выходные напряжения блоков 1, 4, 8 и 9.
Компаратор 10 реализует функцию Uio SignUg, т.е.
,. f +1, ; Ul°-{-1,
Единичный выходной сигнал поступает на вход корректирующего блока 11, реализующего передаточную функцию вида
Wii(p)
1
Тф + 1
Тэм,
электромагнитная постоянная
времени электродвигателя.
Сигнал с блока 11 поступает на блок 12 умножения, где умножается на выходной сигнал компаратора 13 (1Из), соответствующий знаку сигнала рассогласования устройства, т.е.
Ui, т.е.
Г +1, при Ui 0 ,
U13 1
-1, при Ui 0
В результате этого знак выходного сигнала блока 12 умножения обеспечивает отрицательность обратной связи в контуре координатно-операторной обратной связи.
Выходной сигнал блока 12 умножается в блоке 2 умножения на сигнал рассогласования и поступает на вход интегратора 3, выходной сигнал которого является интегральной составляющей сигнала управления электродвигателем 7. В сумматоре 4 осуществляется суммирование пропорциональной и интегральной составляющих сигнала управления электродвигателем.
Выходной сигнал сумматора 9 характеризует в каждый момент времени расстояние до линии переключения, определяемой весовыми коэффициентами величин, поступающих на входы сумматора 9.
В логическом блоке 14 на основании информации о знаке и расстоянии изображающей точки до линии переключения, а также информации о знаке сигнала рассогласования формируется сигнал операторно- координатной обратной связи (ОКОС).
Умножая выходной сигнал сумматора 9
на его знак (выходной сигнал компаратора 10 соответствует знаку Ug), на выходе блока 18 умножения получается модуль выходного сигнала сумматора 9. В блоке 19 умножения этот сигнал умножается на сигнал, соответствующий знаку сигнала рассогласования устройства (Uis).
В результате этого на первом выходе логического блока 14 (выход блока 19 умножения) формируется сигнал ОКОС, осуществляющей парирование неконтролируемых моментных возмущений на выходном валу электродвигателя.
Вид сигнала ОКОС определяется в логическом блоке 14 по величине сигнала с выхода сумматора 9 (Ug).
Если модуль lUg| U21, где U21 - величина порогового сигнала, задаваемого за- датчиком 21, ключ 15 разомкнут и на сумматор 17 поступает только сигнал с выхода блока 19 умножения с весовым коэффициентом Кв. Если IUgl U21. ключ 15 замкнут и на входы сумматора 17 поступают сигналы с выхода ключа 15 с весовым коэффициентом Кз и с выхода корректирующего блока 16 с весовым коэффициентом, равным 1.
Следовательно, сигнал ОКОС определяется как
,. K8-lU9|signUi. lUg| U2i; UoKOC-|(K8+K4+Wi6(p). I Ug I sign Ui.l Ug ,
где Wie(p) --- - передаточная функция корректирующего блока 16; м;
Тм - механическая постоянная времени электродвигателя,
К4 и Кв - коэффициенты усиления сумматора 17 по соответствующему входу, выбираемые в зависимости от параметров электродвигателя 7 и диапазона действующих моментных возмущающих воздействий.
При подаче на первый вход первого сумматора 1 сигнала типа l(t) напряжение на выходе сумматора 9 положительно. Сигнал, соответствующий знаку этого сигнала, с выхода компаратора 10 поступает на вход корректирующего блока 11, выходной сигнал которого плавно увеличивается, увеличивая сигнал, поступающий на вход интегратора 3, следовательно, и величину интегральной составляющей сигнала управления.
При lUgl L)21, ключ 15 разомкнут и сигна управления электродвигателем определяется как
Uynp K5Ui +К7/ lUil,Undt +
+ Кв lUgl slgnUi,
где К - коэффициент усиления сумматора 4 по соответствующему входу, выбираемый исходя из требований, предъявляемых к виду переходного процесса и параметров электродвигателя 7.
Второе слагаемое сигнала управления позволяет парировать изменение параметров электродвигателя, а третье - неконтролируемые изменения моментных возмущающих воздействий.
В процессе отработки устройством заданного значения тока уменьшается сигнал рассогласования (Ui), увеличивается значение выходной координаты (Us) и сигнал (Ug) на выходе сумматора 9 изменяет свой знак. Изменение знака Ug приводит к изменению знака выходного напряжения второго компаратора 10 и выходной сигнал второго корректирующего блока 11 плавно уменьшается, уменьшая тем самым интегральную составляющую сигнала управления электродвигателем.
При дальнейшей отработке заданного значения тока изменяется знак интегральной составляющей, что приводит к уменьшению значения сигнала управления электродвигателем по мере приближения выходной координаты к заданному значению.
Уменьшение значения сигнала Ug приводит к тому, что выполняется условие I Ug I U21 и сигнал управления электродвигателем определяется как
иупр K5Ui +K7/Uii-Unl dt+
о
+ Кв lUglstgn Ui + KU |Ug|signUi.+
+ Wi6 lUgl signUi. Четвертое слагаемое сигнала управления увеличивает составляющую сигнала управления, парирующую изменения
5 моментных возмущающих воздействий.
Пятое слагаемое позволяет парировать не только моментные возмущения, но и возмущения, вызванные наличием противо- ЭДС в электродвигателе и погрешностью
0 определения скорости изменения тока электродвигателя, причем введение первого корректирующего блока 16 позволяет уменьшить перерегулирование, вызванное изменением моментных возмущений.
5В установившемся режиме в устройстве
устанавливается постоянный коэффициент при интегральной составляющей и некоторое постоянное значение сигнала ОКОС. В случае изменения сопротивления Ря,
0 вызванное как девиацией RH, так и разбросом значений Ря для многодвигательных роботов, например ромбических манипуляторов, изменяется момент изменения знака сигнала Ug, т.е. изменяется весовой козффи5 циент при интегральной составляющей сигнала управления электродвигателем, обеспечивая тем самым инвариантность показателей качества переходного процесса к изменению сопротивления якорной цепи
0 электродвигателя.
Формула изобретения
1. Устройство для управления приводом
5 робота, содержащее первый сумматор, последовательно соединенные первый блок умножения, интегратор, второй сумматор, усилитель мощности и электродвигатель, последовательно соединенные датчик тока,
0 третий сумматор, первый компаратор и первый корректирующий блок, при этом выход первого сумматора через усилитель соединен с вторым входом второго сумматора, один из входов первого сумматора связан с
5 входом устройства, а его другой вход подключен к выходу датчика тока, вход которого соответствующим образом связан с электродвигателем, кроме того, соответствующие входы третьего сумматора соединены с
0 выходами первого и второго сумматоров, отличающееся тем, что, с целью повышения динамической точности, оно снабжено вторым блоком умножения, вторым компаратором и последовательно сое5 диненными логическим блоком, ключом, вторым корректирующим блоком и четвертым сумматором, выход которого подключен к третьему входу второго сумматора, при этом первый вход логического блока
подключен к выходу третьего сумматора, второй вход логического блока соединен с выходом первого компаратора, а его третий вход - с выходом второго компаратора, вход которого соединен с выходом первого сумматора и первым входом первого блока умножения, второй выход логического блока соединен с управляющим входом ключа, остальные входы четвертого сумматора связаны соответственно с первым выходом логического блока и выходом ключа, причем выход второго компаратора через второй блок умножения соединен с вторым входом первого блока умножения, а второй вход
второго блока умножения подключен к выходу первого корректирующего блока.
2. Устройство по п. 1, отличающее- с я тем, что логический блок содержит последовательно соединенные задатчик и компаратор, а также последовательно соединенные два блока умножения, входы первого из которых соединены с первым и вторым входами логического блока, а второй вход и выход второго - соответственно с третьим входом и первым выходом логического блока, причем выход первого из блоков умножений через компаратор связан с вторым выходом логического блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом робота | 1987 |
|
SU1495116A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Способ управления последовательным резонансным инвертором напряжения с диодами встречного тока | 1989 |
|
SU1791941A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Следящая система | 1984 |
|
SU1216773A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
Изобретение относится к автоматическому управлению и может быть использовано при создании различных робототехнических систем. Цель изобретения состоит в повышении динамической точности управления приводным электродвигателем. Для этого в устройство, содержащее первый сумматор, первый блок умножения, интегратор, второй сумматор, усилитель мощности, электродвигатель, датчик тока, тртий сумматор, первый компаратор и первый корректирующий блок, дополнительно введены второй блок умножения, второй компаратор, логический блок, второй корректирующий блок и четвертый сумматор. Т.о., в устройстве формируется сигнал управления электродвигателем, содержащий сумму сигнала, пропорционального сигналу рассогласования, сигнала, пропоционального интегралу от сигнала рассогласования, и сигнала операторно-координатной обратной связи. Построенный таким образом сигнал управления электродвигателем позволяет парировать изменения параметров электродвигателя за счет изменения весового коэффициента при интегральной составляющей, а также неконтролируемые изменения моментальных возмущений и возмущения, вызванные наличием противоЭДС электродвигателя. 1 з.п.ф-лы, 1 ил.
| Устройство для управления приводом робота | 1987 |
|
SU1495116A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
