СО ел
ел
СП
Изобретение относится к средствам автоматического управления гидромеханическими передачами транспортных средств, в частности, автомобилей.
Целью изобретений является повьппе ние долговечности электромеханической передачи и комфортабельности транспортного средства при эксплуатации путем исключения пиковых динамических нагрузок.
На фиг, I изображена электрическая схема системы автоматического управления гидромеханической передачей; на фиг, 2 - диаграмма работы системы.
Система автоматического управления гидромеханической передачей содержит бесконтактный индукционный датч1 к 1 скорости движения автомобиля, трехпозиционный контактный датчик 2 положения педали топливопода- чи, частотно-аналоговый преобразователь 3, блок 4 сравнения управления переключением ступеней, блок 5 сравнения управления блокировкой гидротрансформатора, элемент НЕ 6, элементы И 7-9, дешифратор 10, триггеры 11 и 12 управления переключением первой и второй ступенями гидромеханической передачи, триггер 13 управления блокировкой гидротрансформатора, линии 14 и 15 задержки, блоки 16-18 усиления, электромагнитные клапаны 19 и 20 управления переключением первой и второй ступеней гидромеханической передачи, электромагнитный клапан 21 управления блокировкой гидротрансформатора, блоки 22 и 23 гистерезиса прямых и обратных переключений, селектор 24 выбора режима движения и стабилизированный источник 25 питания,
Система работает следующим образом,
При переводе селектора 24 в положение, соо-Лзетствующее автоматическому управлению, осуществляется подача тока питания в электронную часть системы и одновременно на входы элементов И 7 и 8, Так как в начальный период трогания с места значения параметров управления еще не достигли значений, соответствующих переключению на вторую ступень, блоком 4 сравнения формируется сигнал низкого уровня, который после инвертирования элементом НЕ 6 подается на вход элемента И 7, Сигнал высокого
0
0
5
0
уровня на выходе элемента И 7 через линию 14 задержки устанавливает триггер I 1 в верхнее устойчивое состояние, соответствующее влкючению электромагнитного клапана Г9 управления переключением первой ступени. Одновременно данный сигнал дублирует дополнительно команду выключения второй ступени переводом триггера 12 в нижнее устойчивое состояние. Команда на включение первой ступени с выхода триггера I1 после усиления в блоке 16 усиления подается на обмотку электромагнитного клапана 19,
В процессе разгона автомобиля происходит увеличение его скорости, сигнал об этом из индукционного датчика 1 поступает на вход частотно-аналогового преобразователя 3, После преобразования в блоке 3 сигнал из датчика 1, а также сигнал от трех- позиционного контактного датчика 2 положения педали топливоподачи поступают на входы блоков 4 и 5 сравнения, реагирующих на их определенное соотношение. Значения скорости движения, при которых происходит срабатывание блоков 4 и 5 и подачи команд на соответствующие переключения гидромеханической передачи, меняются ступенчато в зависимости от положения педгши топливоподачи по диапазонам: топлива в двигатель менее 50% от номинального значения; подача топлива в пределах 50-90%; подача топлива в пределах 90-100% (близко к максимальной) ,
Причем в первых двух случаях может быть предусмотрена возможность опережающей блокировки гидротрансформатора (срабатывание блока 5, точка А на фиг,2 по сравнению с подачей команды на переключение ступеней механи- 5 ческого редуктора (срабатывание блока 4), т,е, движение с блокировкой гидротрансформатора на первой ступени, что положительно сказывается на топливной экономичности автомобиля, Переключение гидромеханической передачи в условиях, когда топливоподача близка к номинальной, преследует собой другую цель - обеспечение максимальных динамических хара1 теристик разгона,
. Таким образом, при достижении параметров управления значений, соответствующих моменту переключения на вторую ступень, блоком 4 сравнения
5
0
0
5
5IA95I
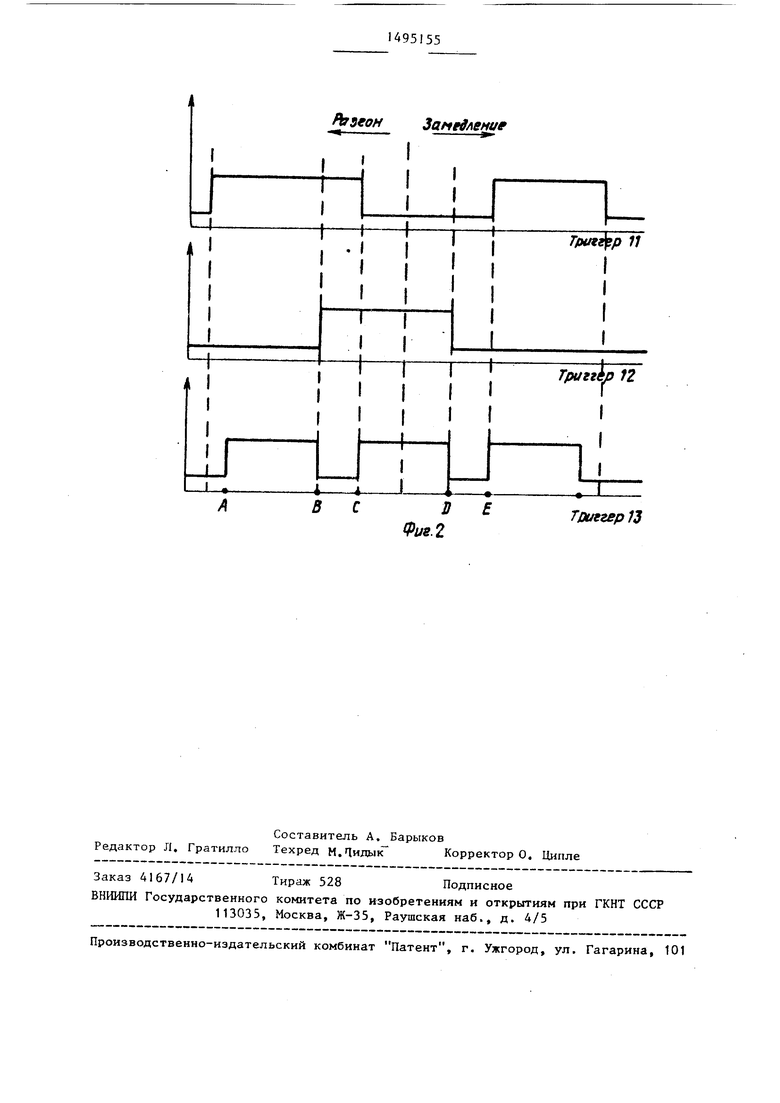
формируется сигнал высокого уровня, который поступает на один из входов элементами 8. При наличии на другом входе элемента И 8 разрешающего сигнала от селектора 24 происходит пере вод триггера 12 в верхнее устойчивое состояние. Команда на включение второй ступени из триггера 12 после усиления в блоке 17 подается на об- ю мотку электромагнитного клапана 20 управления переключением второй ступени. При этом на протлжении определенного промежутка времени, задаваемого линией задержки 15, остается |5 включенным фрикцион предыдуп(ей первой ступени, чем обеспечивается необходимое перекрытие переключаемых фрикционом во времени и неразрывности пе)едачи силового потока, что поло- 20 жительно сказывается на плавности переключения между первой и второй ступенями. Но истечении заданного времени линия 15 задержки срабатывает и переводит триггер II в нижнее устой- 25 чивое состояние, при котором обеспечивается обмотка электромагнитного клапана 19. Блокировка гидротрансформатора производится при подаче сигнала высокого уровня из блока 5. Этот ЗО сигнал через элемент И 9 устанавливает триггер 13 в верхнее устойчивое состояние и после усиления в блоке 18 подается на обмотку электромагнитного клапана 21. Для повышения плавное- -,, ти при переключениях передачи предусмотрена разблокировка гидротрансформатора. Управление блокировкой и разблокировкой гидротрансформатора осуществляется дешифратором 10, На дд фиг.2 представлены выходные сигналы триггера управления первой и второй ступенями и триггера управления блокировкой. Если автомобиль движется на первой (отрезки АВ и EF), или на дс второй ступени (отрезок CD), на входы дешифратора 10 поступают один сигнал высокого уровня и один сигнал низкого уровня, что соответствует появлению сигналов высокого уровня на 50 втором или третьем выходах дешифратора 10. Этот сигнал поступает на один из входов элемента И 9 и при наличии разрешающего сигнала на другом входе - от блока 5 происходит перевод тригге- 5 ра 13 в верхнее устойчивое состояние и последующее включение электромагнитного клапана 21 управления блокировкой гидротрансформатора. При пере55
ключении передач, когда на входы дешифратора поступают сигналы высокого уровня (отрезок ВС) или только низкого уровня (отрезок DE), на первом или четвертом выходах дешифратора 10 появляется сигнал высокого уровня, который переводит триггер 13 в нижнее устойчивое состояние что соответствует разблокировке гидротрансформатора .
Аналогично о поступлении момента обратного переключения с второй на первую ступень свидетельствует изменение на выходе блока 4 сигнала высокого уровня на сигнал низкого. Соответственно элементом НЕ 6 инвертируется команда на включение первой ступени и производится ее подача на вход элемента И 7. При наличии на другом входе разрешающего сигнала, соответствующего положению А селектора 24, сигнал высокого уровня с выхода элемента И 7 переводит триггер 12 в нижнее устойчивое состояние, а потом по истечении времени запаздывания, задаваемого линией 14 задержки, переводит триггер II в верхнее устойчивое состояние, т.е. сначала подается команда выключения второй ступени, а затем по Истечении времени запаздывания начинается процесс включения фрикциона первой ступени, При этом на протяжении этого цроме- жутка времени триггеры I1 и I2 вырабатывают на входы дешифратора 10 сигналы низкого уровня, что соответствует появлению на первом выходе дешифратора 10 команды на перевод триггера 13 в низкое устойчивое состояние, одновременно сигнал низкого уровня на втором и третьем выходах дешифратора 10 запретит элементу И 9 установить триггер 13 в верхнее ус- тойчивое состояние. Таким образом команда на разблокировку гидротрансфор- матора с выхода триггера 1 3 через блок 18 усиления обеспечит обмотку электромагнитного клапана 21. По окончании переключения передач и включения первой ступени высокий уровень сигнала с выхода триггера 11 поступит на первый вход дешифратора 10, а низкий уровень сигнала с выхода триггера 12 поступит на второй вход дешифратора 10. 1и;лед- ствие чего команда на включение блокировки с второго выхода дешифратора 10 череэ элемент И 9 установит триггер 13 в верхнее устойчивое соетояние, сигнал с которого после усиления в блоке 18 подается на обмотку электромагнитного клапана 21 управления блокировкой гидротрансформатора.
Такая организация процесса переключения с опережающим выключением фрикциона предьщущей ступени и последующей кратковременной разгрузкой двигателя обуславливается необходи- мостью его быстрого разгона реключении на низшую ступень и болие полного использования мощностных показателей.
j Для исключения возможности автоко|лебаний выключение второй ступени происходит со сдвигом по скорости по отношению к включению, величину которого определяет блок 22 гистерезима прямых и обратных переключений.
При падении скорости движения осуществляется разблокировка гидротрансформатора, о чем сигнализирует исчезновение сигнала на выходе блока 5 (точка F, фиг.2). Момент разблокировки определяется нactpoйкoй гистере- зисной характеристики блока 23.
Применение настоящей системы автоматического управления гидромеханической передачей за счет применения элементов, обеспечивающих необходимую плавность переключения между ступенями, разрешает улучшить комфортабельность движения, исключить возникновение пиковых динамических нагрузок, что влечет за собой увеличение долговечности работы двигателя и элементов трансмиссии.
Формула изобретения
Система автоматического управления гидромеханической передачей транспортного средства, содержащая датчик скорости движения, выходом соединенный через частотно-аналоговый преобразователь с первым входом первого блока сравнения, второй вход которого подключен к датчику положения педали топливоподачи, а выход через первый блок прямых и обратных переключений подключен.к третьему входу первого- блока сравнения, устройство переключения передач, которое включает в себя электромагнитный клапан переклю
чения первой передачи и электромаг
5 0
5
0
5
0
с
0
5
нитный клапан переключения второй передачи, причем вход первого из них через блок усиления подключают к выходу второго триггера, а вход второго - через другой блок усиления - к выходу второго триггера, при этом S-вход первого триггера через первую линию задержки соединен с выходом элемента и первый вход элемента И соединен с выходом селектора выбора режима движения, а второй вход через элемент НЕ соединен с выходом первого блока сравнения, первый вход второго блока сравнения соединен с выходом частотно-аналогового преобразователя, второй выход - с датчиком положения педали топливоподачи, а выход подключен через второй блок прямых и обратных переключений к третьему входу второго блока сравнения и через соответствующий блок усилия к электромагнитному клапану блокировки гидротрансформатора, при этом источник питания подключен к селектору выбора режима движения, отличающаяся тем, что, с целью повышения долговечности гидромеханической передачи и комфортабельности транспортного средства при эксплуатации путем исключения пиковых динамических нагрузок, она снабжена дешифратором, двумя элементами И, дополнительным триггером, выходом, соединенным через соответствующий блок усиления с электромагнитным клапаном блокировки гидротрансформатора, R-вход дополнительного триггера подключен к первому и четвертому выходам дешифратора, а S-вход - к выходу второго элемента И, первый вход которого соединен с выходом второго блока сравнения, а второй вход - с вторым и третьим выходами дешифратора, первый вход которого подключен к выходу первого триггера, а второй вход - к выходу второго триггера, при этом первый вход третьего элемента И соединен с выходом селектора выбора режима движения, а второй вход - с выходом первого блока сравнения, выход третьего элемента И через вторую линию задержки и непосредственно подключен соответственно к Л-входу первого триггера и S-входу второго триггера.
А
В
Фи8.2
TDutzep 1Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления гидромеханической передачей транспортного средства | 1986 |
|
SU1310252A1 |
| Система автоматического управления гидромеханической передачей транспортного средства | 1988 |
|
SU1546301A1 |
| Электронная система автоматического управления гидромеханической реверсивной передачей | 1990 |
|
SU1773750A1 |
| Электронная система автоматического управления трехступенчатой гидромеханической передачей | 1988 |
|
SU1530499A1 |
| Система управления гидромеханической многоступенчатой передачей | 1987 |
|
SU1437257A1 |
| Система управления гидромеханической коробкой передач транспортного средства | 1985 |
|
SU1316859A1 |
| Система автоматического управления гидромеханической трансмиссией | 1985 |
|
SU1341071A1 |
| Устройство управления фрикционными муфтами гидромеханической трансмиссии транспортного средства | 1989 |
|
SU1678659A1 |
| Система управления гидромеханической трансмиссией транспортного средства | 1985 |
|
SU1258722A1 |
| Система автоматического управления гидромеханической трансмиссией | 1989 |
|
SU1682218A1 |
Изобретение относится к средствам автоматического управления гидромеханическими передачами транспортных средств. Целью предлагаемого изобретения является повышение долговечности гидромеханической передачи и комфортабельности транспортного средства при эксплуатации путем исключения пиковых динамических нагрузок. Система содержит индукционный датчик 1 скорости движения автомобиля, контактный датчик 2 положения педали топливоподачи, частотно-аналоговый преобразователь 3, блоки сравнения управления переключением ступеней, блок 5 сравнения управления блокировкой гидротрансформатора, элемент НЕ, элементы И, дешифратор 10, триггеры 11-13, линии задержки 14 и 15 блоки 16-18 усиления, электромагнитные клапаны 19 и 20 управления переключением ступеней, электромагнитный клапан 21 управления блокировкой гидротрансформатора, блоки 22 и 23 гестерезиса прямых и обратных переключений, селектор 24 выбора режима движения и источник 25 питания. 2 ил.
| Система автоматического управления гидромеханической передачей транспортного средства | 1986 |
|
SU1310252A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
