Изобретение относится к области автоматического регулирования и может быть использовано в высокоточных системах стабилизации скорости двигателей при работе на инфраяизкнх скоростях.
Цель изобретения - повьшйние точности стабилизации мгновенных скоростей в диапазоне ин анизких скоростей,,
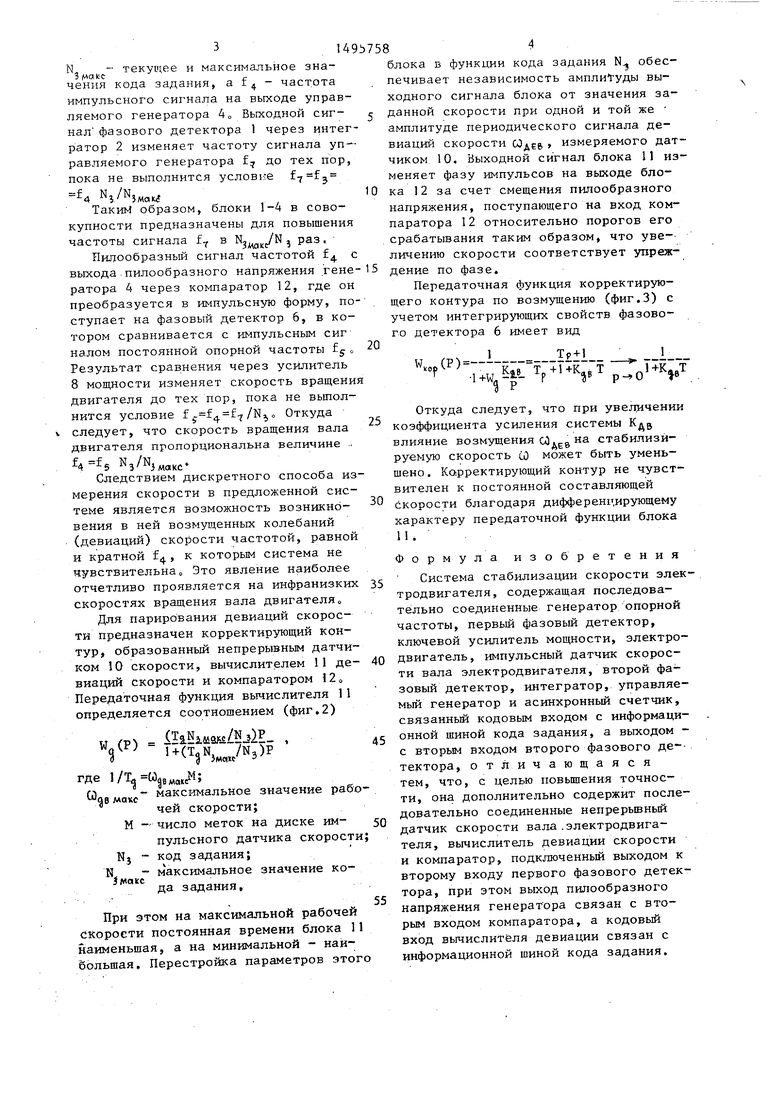
На фиг.1 приведена структурная схема системы; на Го2 - структурная схема вычислителя девиации скорости; на фиг.З - упрощенная стрзгк- турная схема системы.
Система содержит второй фазовый детектор , интегратор 2, асинхронный счетчик 3, управляемый генератор 4 генератор 5 опорной частоты, первый фазовый детектор 6, импульсный датчик 7 скорости вала двигателя.
KJйoчeвoй усилитель 8 мощности, электродвигатель 9, непрерывный датчик 10 скорости вала двигателя, вычислитель. 11 девиации скорости, компаратор 12, ключевой элемент 13, интегратор 14, компаратор 15, информационную шину 16 кода задания. Вычислитель 11 содержит операционный усилитель 17, ЦАП 18, интегратор 19.
Система работает следукяц им образом.
На первый вход фазового детектора 1 поступает напряжение с частотой fi, пропорциональной угловой скорос-г ти вращения вала электродвигателя, измеряемой импульсным датчиком 7 ско рости. На второй вход фазового детек- тора 1 поступает импульсный сигнал частотой f5 с асинхронного счетчика 3, при этом NS/N,, где N
ЙКГЛИ
У1
ел
00
N
3 аюс
теку1дее и максимальное зна- 4 чення кода задания, а г - частота импульсного сигнала на выходе управляемого генератора 4„ Выходной сигнал фазового детектора 1 через интегратор 2 изменяет частоту сигнала управляемого генератора f: до тех пор, пока не выполнится условгте f. N,/N,
f,f3
4 г, 3ма1ч
Таким образом, блоки 1-4 в совокупности предназначены для повышения частоты сигнала f в раз..
Пилообразный сигнал частотой f с выхода пилообразного напряжения гене ратора 4 через компаратор 12, где он преобразуется в импульсную форму, поступает на фазовый детектор 6, в котором сравнивается с импульсным сиг налом постоянной опорной частоты fg-« Результат сравнения через усилитель 8 мощности изменяет скорость вращени двигателя до тех пор, пока не выполнится условие ,,0 Откуда следует, что скорость вращения вала двигателя пропорциональна величине .
максСледствием дискретного способа измерения скорости в предложенной системе является возможность возникновения в ней возмущенных колебаний (девиаций) скорости частотой, равной и кратной ц., к которым система не чувствительна о Это явление наиболее отчетливо проявляется на инфранизких скоростях вращения вала двигателя,
Для парирования девиаций скорости предназначен корректирующий контур, образованньй непрерывньм датчиком 10 скорости, вычислителем 11 де- виаций скорости и компаратором 12 Передаточная функция вычислителя 11 определяется соотношением (фиг.2)
W(P)
LIi шшL Jlll+(TaN, /N,)P 9 Зма
де ,
Qfl
I макс
- макс1-1мальное значение рабоN
чей скорости; М - ЧИСЛО меток на диске им- 50 пульсного датчика скорости;
NI - код задания; -j i,
5 макс
максимальное значение кода задания.
При этом на максимальной рабочей скорости постоянная времени блока 11 наименьшая, а на минимальной - наибольшая. Перестройка параметров этого
блока Б функции кода зацания N обеспечивает независимость амплитуды выходного сигнала блока от значения заданной скорости при одной и той же амплитуде периодического сигнала девиаций скорости СОдбб 9 измеряемого датчиком 10. Выходной сигнал блока 11 изменяет фазу импульсов на выходе блока 12 за счет смещения пилообразного напряжения, поступающего на вход компаратора 12 относительно порогов его срабатывания таким образом, что увеличению скорости соответствует упреждение по фазе.
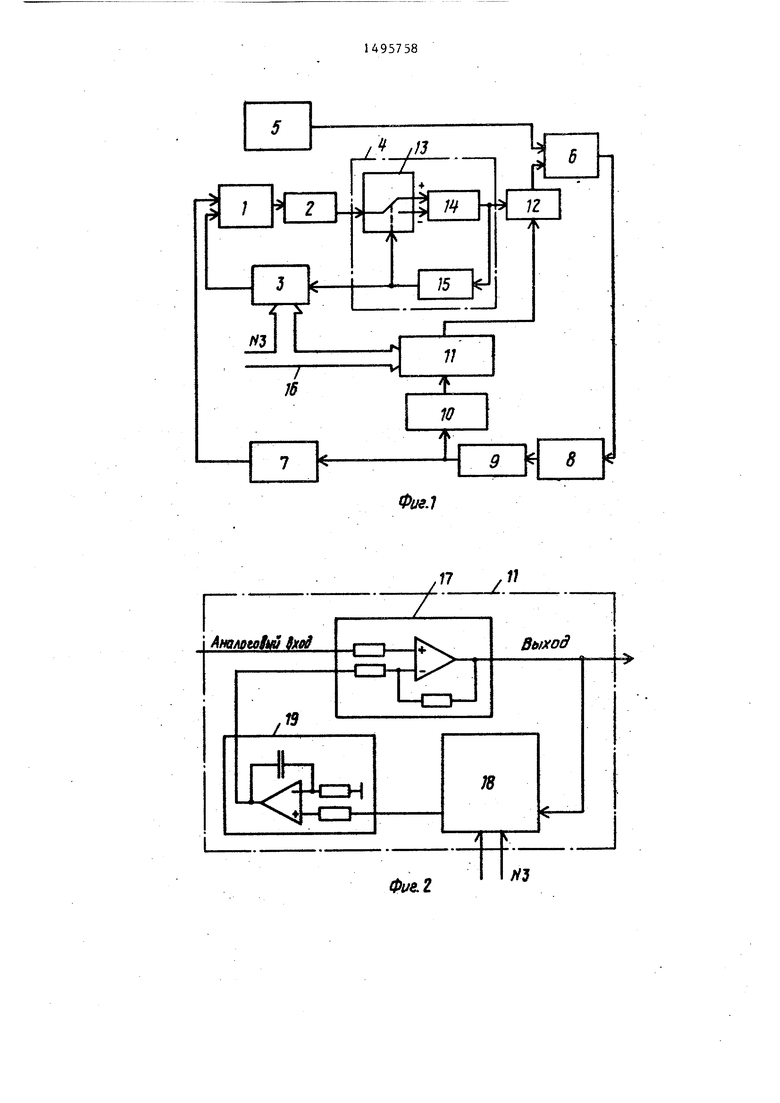
Передаточная функция корректирующего контура по возмущению (фиг.З) с учетом интегрирующих свойств фазового детектора 6 имеет вид
Тр + 1
Tp+UK Р
P-,
Откуда следует, что при увеличении коэффициента усиления системы Кдц влияние возмущения 01.„ на стабилизйДЕо
руемую скорость сО может быть уменьшено. Корректирующий контур не чувствителен к постоянной составляющей скорости благодаря дифференцирующему характеру передаточной функции блока 11.
Формула изобретения
Система стабилизации скорости электродвигателя, содержащая последовательно соединенные генератор опорной частоты, первый фазовый детектор, ключевой усилитель мощности, электродвигатель, импульсный датчик скорости вала электродвигателя, второй фазовый детектор, интегратор, управляе- мьй генератор и асинхронный счетчик, связанный кодовым входом с информационной шиной кода задания, а выходом - с вторым входом второго фазового тектора, отличающаяся тем, что, с целью повьшения точности, она дополнительно содержит последовательно соединенные непрерьшньй датчик скорости вала .электродвигателя, вычислитель девиации скорости и компаратор, подключенный выходом к второму входу первого фазового детектора, при этом выход пилообразного напряжения генератора связан с вторым входом компаратора, а кодовьй вход вычислителя девиации связан с информационной шиной кода задания.
Г
I Ана/ааЬю lal
Z
Выход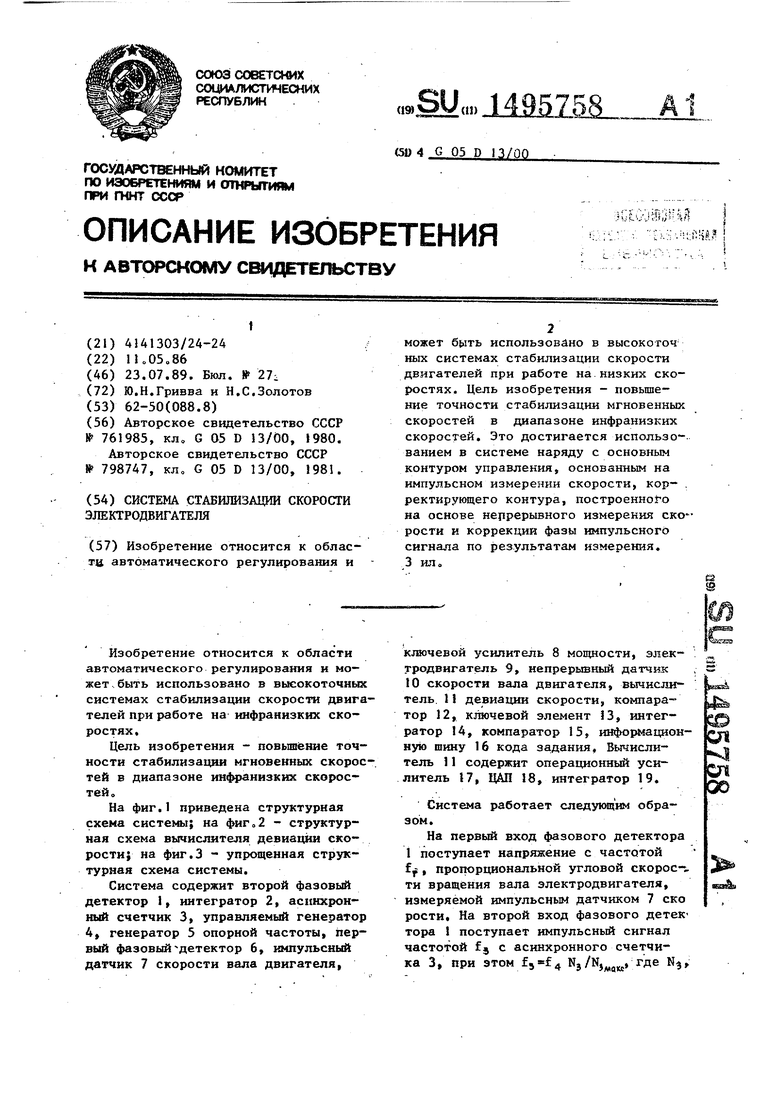
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Частотно-управляемый асинхронный электропривод | 1985 |
|
SU1257798A1 |
Изобретение относится к области автоматического регулирования и может быть использовано в высокоточных системах стабилизации скорости двигателей при работе на низких скоростях. Цель изобретения - повышение точности стабилизации мгновенных скоростей в диапазоне инфранизких скоростей. Это достигается использованием в системе наряду с основным контуром управления, основанным на импульсном измерении скорости, корректирующего контура, построенного на основе непрерывного измерения скорости и коррекции фазы импульсного сигнала по результатам измерения. 3 ил.
Ю
Фиг. г
У/3
eJ
| Авторское свидетельство СССР № 761985, кл G 05 D 13/00, 1980 | |||
| Устройство для стабилизации скоростиэлЕКТРОпРиВОдА | 1979 |
|
SU798747A1 |
