Изобретение относится к области авиационной техники, в Частности к устройствам для буксировки гибких систем, и может быть использовано при буксировке гибкой системы, например плоского полотна с размещенным на нем навигационным зондом для геологоразведочных работ, выполненным в виде длинной гибкой нити.
- Целью изобретения является повышение надежности стабилизации гибкой системы по потоку.
На фиг. изображено устройство, общий вид; на Лиг.2 - узел крепления гибкой системы.; на фиг.З - вид по стрелке Л на фиг.2; на фиг.4 - конструкция дополнительного заднего стаби- ли эатора с демпфером; на фиг.5 вид по стрелке Б на фиг.4; на фиг,б - ограничительный зажим.
Устройство для буксировки гибкой системы содержит закрепленный на летательном аппарате 1 буксировочный строп 2, буксируемую плоскую гибкую систему 3, снабженную стабилизатором 4, выполненным в виде парашюта стабилизирующий модуль 5 с оперением б, закрепленный на буксировочном стропе.2, на котором установлены с возможностью поворота держатель 7 гибкой системы 3 и ограничительные зажимы 8. На переднем и заднем вертикальных торцах гибкой системы 3 закреплены стержневые элементы 9, на нижних концах которых установлены шарнирно дополнительные передний 10 и задний 11 стабилизаторы вертикальйого положения гибкой системы 3, выполненные в виде грузов обтекаемой
формы, задний дополнительный стабилизатор 11 снабжен демпфером 12. Стаби лизатор 4 снабжен вертлюгом 13 и фалами 14, при помощи которых он соединен с верхним краем плоской гибкой системы 3 и демпфером 12. Плоская гибкая система 3 установлена шарнирн при помощи кронштейна 15 на держателе 7 и выполнена в виде сети.
Устройство работает следующим образом.
При буксировке устройства летательным аппаратом 1 буксировочный строп 2 находится в натянутом положении под действием стабилизирующего модуля 5. Плоская гибкая система 3,
5
0
5
0
5
,5
5
б
закрепленная шарнирно на держателе 7, установленном на стропе 2, рас- |Тягивается стабилизатором 4 при помощи фалов 14 и располагается по потоку. При этом демпфер 12 обеспечивает равномерное натяжение нижнего (края плоской гибкой системы 3, а дополнительные передний Ш и задний 11 стабилизаторы обеспечивают ее вертикальное положение в потоке. Ограничительные зажимы 8 препятствуют перемещению держателя 7 с гибкой системой 3 вдоль буксировочного стропа 2. При этом выполнение гибкой системы 3 в виде сети позволяет уменьшить дестабилизирующее воздействие на нее воздушного потока.
Формула изобретения
1.Устройство для буксировки гибкой системы, содержащее движущийся объект, буксировочный строп, буксируемую плоскую гибкую систему, снабженную стабилизатором, отличающееся теМ, что, с целью повышения надежности стабилизации гибкой системы по потоку, устройство снабжено стабилизирующим модулем с опе- р ением, закрепленным на буксировочном стропе, держателем гибкой системы, установленным с возможностью поворота на буксировочном стропе над
стабилизирующим модулем, стержневыми элементами, закрепленными на переднем и заднем4 вертикальных торцах плоской гибкой системы, дополнительными передним и задним стабилизаторами вертикального положения гибкой ,системы, выполненными в виде грузов обтекаемой формы и установленными шарнирно в нижней части гибкой системы на стержневых элементах, причем дополнительный задний стабилизатор снабжен демпфером, стабилизатор выполнен в виде парашюта, снабжен верт- .люгом и соединен при помощи фалов ic верхним краем плоской егибкой системы и демпфером дополнительного заднего стабилизатора, а гибкая система установлена шарнирно на держателе гибкой системы.
2.Устройство по п.1, о т л и ч, ающее ся тем, что гибкая система выполнена в виде сети.
SS//
v {LS/tS tf /L §Э © © ® 9
il
©
y////////jf/////yx/A
SS//SS:,
9
S/STSi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации буксируемой гибкой системы | 1988 |
|
SU1600226A1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2007 |
|
RU2339546C2 |
| Устройство стабилизации вертикального положения диполей антенной системы на летательном аппарате | 1987 |
|
SU1550797A1 |
| ПОДВЕСКА, АВТОСТАБИЛИЗИРУЮЩАЯ МЯГКОЕ ПРИВЯЗНОЕ КРЫЛО (ВАРИАНТЫ) | 2010 |
|
RU2456210C2 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1995 |
|
RU2092394C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1988 |
|
SU1797238A1 |
| АВАРИЙНО-СИГНАЛЬНАЯ СИСТЕМА | 1997 |
|
RU2130874C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ | 2005 |
|
RU2358294C2 |
| Устройство для стабилизации буксируемой гибкой антенной системы | 1988 |
|
SU1729916A1 |
| СПОСОБ КАТАПУЛЬТИРОВАНИЯ ЛЕТЧИКА ИЗ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621133C1 |
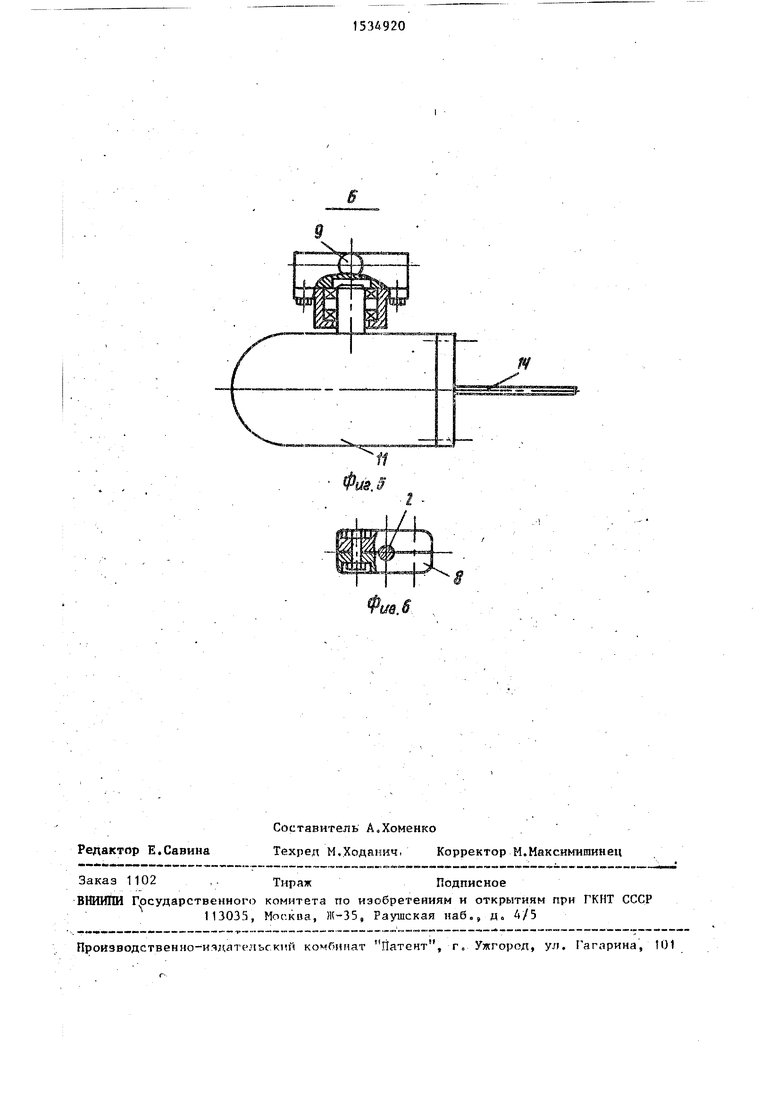
Изобретение относится к области авиационной техники, в частности к устройствам для буксировки гибких систем, и может быть использовано при буксировке гибкой системы, например плоского полотна с размещенным на нем навигационным зондом для геологоразведочных работ, выполненным в виде длинной гибкой нити. Целью изобретения является повышение надежности стабилизации гибкой системы, по потоку. Устройство содержит закрепленный на летательном аппарате 1 буксировочный строп 2, буксируемую плоскую гибкую систему 3, снабженную стабилизатором 4, выполненным в виде парашюта, стабилизирующий модуль 5 с оперением 6, закрепленный на буксировочном стропе 2, на котором установлены с возможность поворота держатель 7 гибкой системы 3 и ограничительные зажимы 8. На переднем и заднем вертикальных торцах гибкой системы 3 закреплены стержневые элементы 9, на нижних концах которых установлены шарннрно дополнительный передний 10 и задний 11 стабилизаторы вертикального положения гибкой системы 3, выполненные в виде грузов обтекаемой формы,- Задний дополнительный стабилизатор 11 снабжен демпфером 12. Стабилизатор 4 снабжен вертлюгом 13 и фалами 14, при помощи которых он соединен с верхним краем плоской гибкой систе- мы 3 и демпфером 12. Плоская гибкая система 3-установлена шарнирно при помощи кронштейна 15 на держателе 7 и выполнена в виде сети. 1 з.п. ф-лы, 6 ил. сл с ел оэ Ј СО N9 
026VESl
t
M
к
