Изобретение относится к авиационной технике, в частности к конструкции устройств, буксируемых на гибкой связи, и может быть использовано при буксировке гибких плоских систем, расположенных перпендикулярно воздушному потоку.
Известно устройство для буксировки гибкой системы, содержащее буксируемое тело, связанное через гибкую систему с движущимся объектом - самолетом (см. патент Франции N 1336769, кл. B 64 D 1/00, 1962 г. ).
Недостатком этого устройства является невозможность буксирования плоской гибкой системы перпендикулярно вектору воздушного потока.
Наиболее близким по технической сущности к предлагаемому является устройство для буксировки гибкой системы, содержащее связанные с буксировщиком через кабель-тросы стабилизаторы гибкой системы с размещенными на них механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку (см. А. с. N 1517272, кл. B 64 D 3/00, 1987 г. ).
Данное устройство хотя и позволяет буксировать гибкую систему перпендикулярно вектору воздушного потока, т. е. устраняет один из недостатков аналога, но также имеет низкие эксплуатационные характеристики и узкую область применения, обусловленные тем, что гибкая система выполнена в форме тела, у которого его длина 1 значительно превышает ширину (например, в случае выполнения гибкой системы в виде каната, у которого d(S) < 1, 1 > S), вследствие чего не обеспечивается устойчивая буксировка плоской системы квадратной или прямоугольной формы, например квадратного полотна размерами от 0,5 x 0,5 м и выше. Это не позволяет обеспечить буксировку плоской системы с расположенной на ней, например, плоской антенной системой или датчиками давления, температуры и т. д. , перпендикулярно потоку в диапазоне углов отклонения от вертикали не более 10о для измерения параметров и характеристик различных наземных и воздушных средств.
Целью изобретения является расширение эксплуатационных возможностей за счет обеспечения буксировки плоской системы перпендикулярно направлению потока.
Для этого устройство для буксировки гибкой системы, содержащее связанные с буксировщиком через кабель-тросы стабилизаторы гибкой системы с размещенными на них механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку, снабжено закрепленными в углах гибкой системы на ее нижней кромке дополнительными стабилизаторами гибкой системы, размещенными на них дополнительными механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку и дополнительных кабель-тросов, причем дополнительные стабилизаторы гибкой системы связаны с буксировщиком через дополнительные кабель-тросы, а стабилизаторы гибкой системы закреплены в углах гибкой системы на ее верхней кромке.
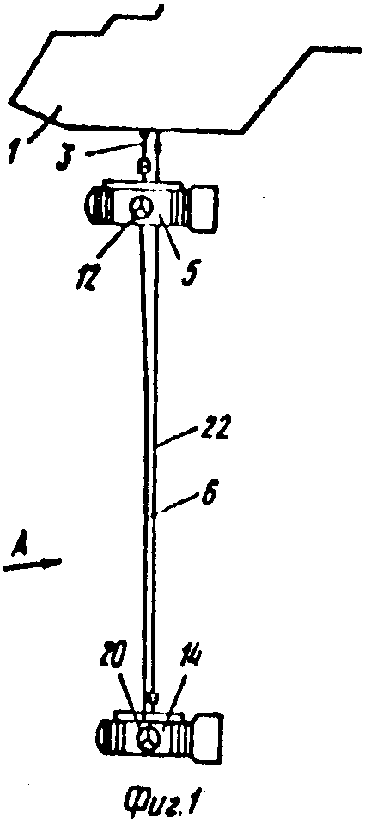
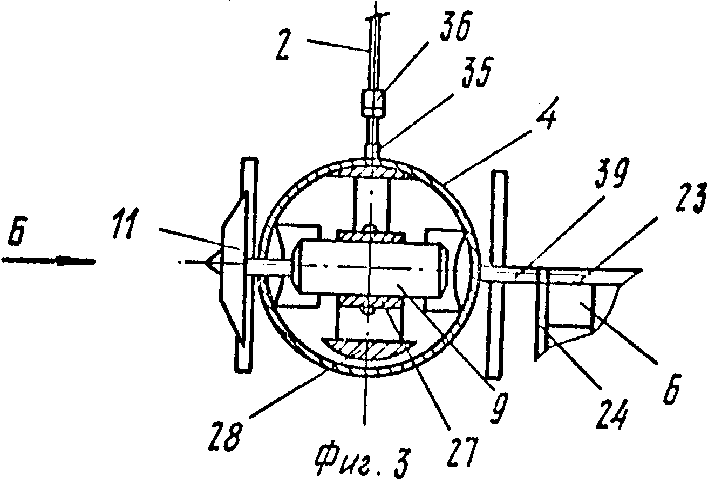
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - стабилизатор гибкой системы; на фиг. 4 - вид Б на фиг. 3.
Устройство для буксировки гибкой системы содержит связанные с буксировщиком 1 через кабель-тросы 2 и 3 стабилизаторы 4 и 5 гибкой системы 6 с размещенными на них механизмами 7 и 8 ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей 9 и 10 и тянущих воздушных винтов 11 и 12, оси которых расположены в горизонтальной плоскости перпендикулярно потоку.
Устройство также снабжено закрепленными в углах гибкой системы 6 на ее нижней кромке дополнительными стабилизаторами 13 и 14 гибкой системы, размещенными на них дополнительными механизмами 15 и 16 ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей 17 и 18 и тянущих винтов 19 и 20, оси которых расположены в горизонтальной плоскости перпендикулярно потоку, и дополнительных кабель-тросов 21 и 22. Дополнительные стабилизаторы 13 и 14 гибкой системы связаны с буксировщиком 1 через дополнительные кабель-тросы 21 и22, а стабилизаторы 4 и 5 гибкой системы закреплены в углах гибкой системы 6 на ее верхней кромке.
Для крепления гибкой системы 6 к стабилизаторам 4 и 5 и дополнительным стабилизаторам 13 и 14 могут использоваться канаты 23-26. При этом канаты 23-26 для крепления гибкой системы 6 расположены попарно параллельно (23 | | 25 и 24 | | 26) и перпендикулярно (23,25 | | 24,26) друг к другу в боковой плоскости буксировщика 1, последовательно соединены друг с другом, образуя квадратную или прямоугольную форму, и места соединения канатов связаны с дополнительными стабилизаторами 13 и 14 гибкой системы и стабилизаторами 4 и 5 гибкой системы.
Гибкая система 6 выполнена в виде сети.
Конструктивно стабилизаторы 4 и 5 гибкой системы и дополнительные стабилизаторы 13 и 14 гибкой системы выполнены идентично.
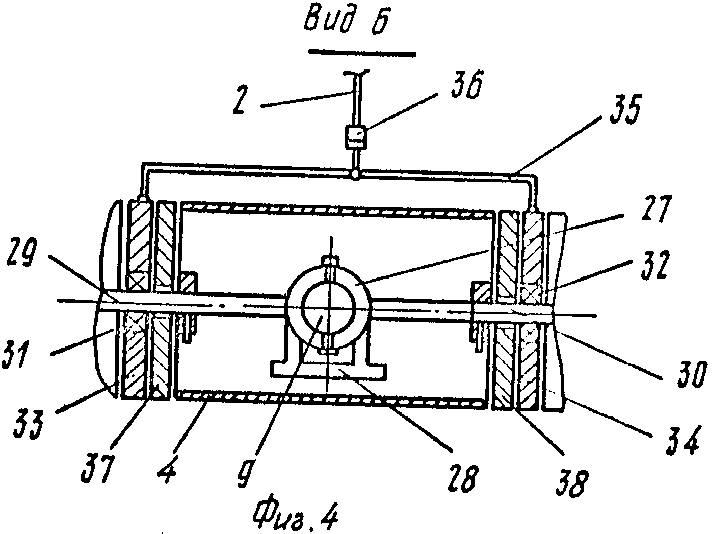
В стабилизаторе 4 гибкой системы двигатель 9 заключен в кожух 27 с противовесом 28, обеспечивающим расположение боковой силы тянущего винта 11 перпендикулярно вектору силы тяжести. Причем кожух 27 закреплен на осях 29 и 30, которые через подшипники 31 и 32 связаны со стенками 33 и 34, соединенными со скобой 35, связанной с кабель-тросом 2, напpимер, через вертлюг 36, и со стенками 37 и 38, которые соединены со скобой 39, связанной с гибкой системой 6.
Скоба 35 обеспечивает свободное перемещение кабель-троса 2 относительно стабилизатора 4 гибкой системы при изменении пространственного положения за счет отклонения стабилизатора 4 и гибкой системы 6 под действием потока воздуха, например, при изменении скорости потока и т. п.
Противовес 28 обеспечивает стабилизацию направления вектора боковой силы от тянущего винта 11.
Скоба 39 обеспечивает развязку силы от гибкой системы 6 на положение стабилизатора 4 гибкой системы.
Аналогичную конструкцию имеют и другие стабилизаторы 5, 13 и 14 гибкой системы.
Буксируемая гибкая система 6 может быть выполнена из диэлектрического материала, металла и т. д.
Стабилизаторы гибкой системы могут быть выполнены в виде обтекаемых тел с оперением.
Канаты могут быть выполнены из диэлектрика, металла и т. д.
Устройство работает следующим образом.
При буксировке гибкой системы 6, например сети с закрепленной на ней гибкой антенной системой, положение гибкой системы 6 перпендикулярно потоку определяется наличием стабилизаторов 4 и 5 гибкой системы с механизмами 7 и 8 ориентации гибкой системы в боковой плоскости и дополнительных стабилизаторов 13 и 14 гибкой системы с дополнительными механизмами 15 и 16 ориентации гибкой системы в боковой плоскости. При действии на гибкую систему 6 неравномерного набегающего воздушного потока и возмущений, например порыва ветра, амплитуда колебаний гибкой системы 6 незначительна за счет наличия стабилизаторов 4 и 5 гибкой системы и дополнительных стабилизаторов 13 и 14 гибкой системы, обеспечивающих продольную устойчивость гибкой системы 6 совместно с кабель-тросами 2 и 3 и дополнительными кабель-тросами 21 и 22 (равновесный треугольник, состоящий из силы натяжения кабель-троса, силы веса и силы лобового сопротивления, действующих на каждый стабилизатор 4,5,13 и 14 гибкой системы) и боковую устойчивость благодаря наличию боковых растягивающих сил от механизмов 7 и 8 ориентации гибкой системы в боковой плоскости и дополнительных механизмов 15 и 16 ориентации гибкой системы в боковой плоскости (равновесный четырехугольник, состоящий из силы натяжения кабель-троса, силы веса, силы натяжения плоской системы и боковой силы, действующих на каждый стабилизатор 4, 5, 13 и 14 гибкой системы). Выполнение гибкой системы 6 в виде сети позволяет уменьшить площадь воздействия потока на нее, и следовательно, снизить амплитуду колебаний, гибкой системы и расход топлива.
Предложенное устройство для буксировки гибкой системы позволяет улучшить эксплуатационные характеристики и расширить область применения устройства за счет устойчивой буксировки плоской системы, квадратной или прямоугольной формы и т. д. , например квадратной сети размерами от 0,5 x 0,5 м и выше, перпендикулярно потоку, что позволяет буксировать такую систему с расположенными на ней диполями в направлении наземных средств, например навигационной РЛС, для ее калибровки и т. п.
Плоская система может являться носителем, на котором размещены различные средства для измерения электрических и других параметров, занимающие значительную площадь. Размещение на плоской системе навигационного зонда, выполненного в виде гибкой нити, позволяет исключить провисание гибкой системы под действием собственного веса путем расположения гибкой нити на плоской системе с учетом провисания.
Выполнение плоской системы в виде сети позволяет повысить устойчивость плоской системы в потоке и снизить расход топлива при буксировке. (56) Патент Франции N 1336769, кл. B 64 D 1/00, 1962.
Авторское свидетельство СССР N 1517272, кл. B 64 D 3/00, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выпуска гибкой системы и устройство для его осуществления | 1987 |
|
SU1517272A1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1988 |
|
SU1797238A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Устройство для выпуска гибкой системы | 1987 |
|
SU1578975A2 |
| БУКСИРУЕМОЕ АНТЕННОЕ УСТРОЙСТВО | 1989 |
|
SU1762503A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
Изобретение относится к авиационной технике, в частности к конструкции устройств, буксируемых на гибкой связи. Цель изобретения - расширение эксплуатационных возможностей за счет обеспечения буксировки плоской гибкой системы перпендикулярно направлению потока. Ориентировка плоской гибкой системы перпендикулярно потоку обеспечивается механизмами ориентации в виде двигателей с тянущими винтами соответственно, создающими боковые силы, развертывающие гибкую систему в поперечной плоскости. Продольная устойчивость гибкой системы обеспечивается стабилизаторами совместно с кабель-тросами, соединяющими стабилизаторы с буксировщиком. 4 ил.
УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ, содержащее связанные с буксировщиком через кабель-тросы стабилизаторы гибкой системы с размещенными на них механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения буксировки плоской гибкой системы перпендикулярно направлению потока, оно снабжено закрепленными в углах гибкой системы на ее нижней кромке дополнительными стабилизаторами гибкой системы, размещенными на них дополнительными механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку, и дополнительных кабель-тросов, причем дополнительные стабилизаторы гибкой системы связаны с буксировщиком через дополнительные кабель-тросы, а стабилизаторы гибкой системы закреплены в углах гибкой системы на ее верхней кромке.
