7 ff
1
00
сд
;о
Изобретение относится к транспортному машиностроению, преимущественно к тихоходным гусеничным машинам.
Цель изобретения - повышение износостойкости ходового механизма.
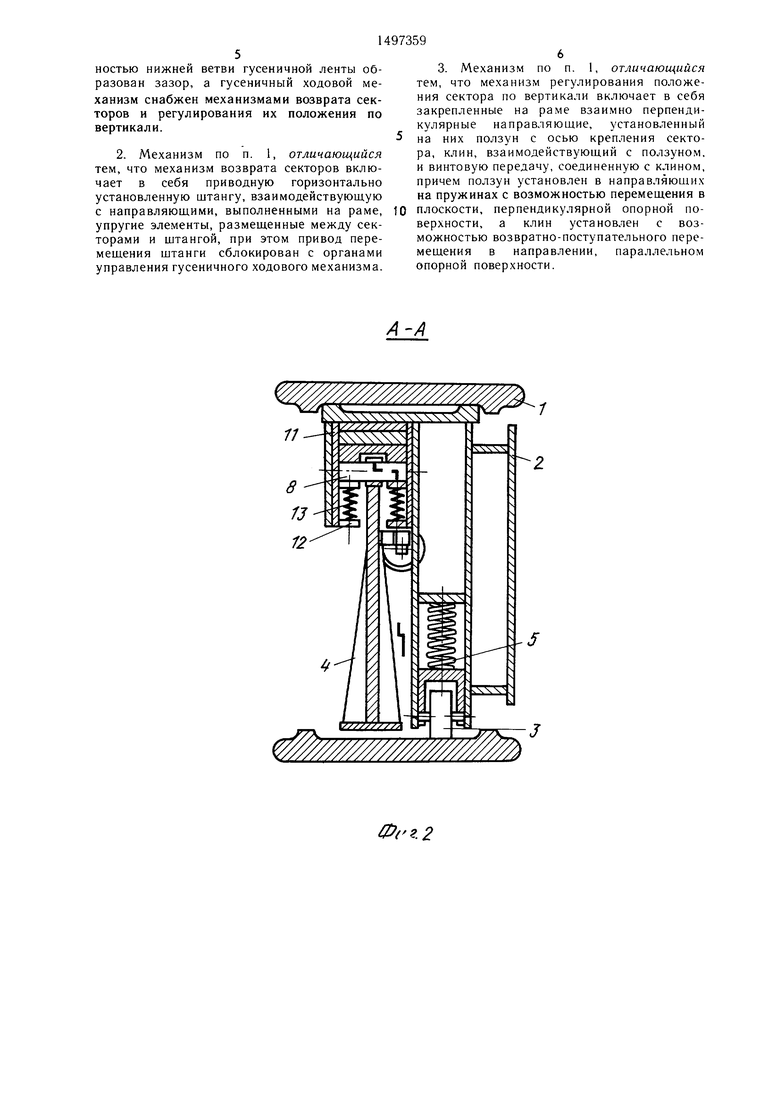
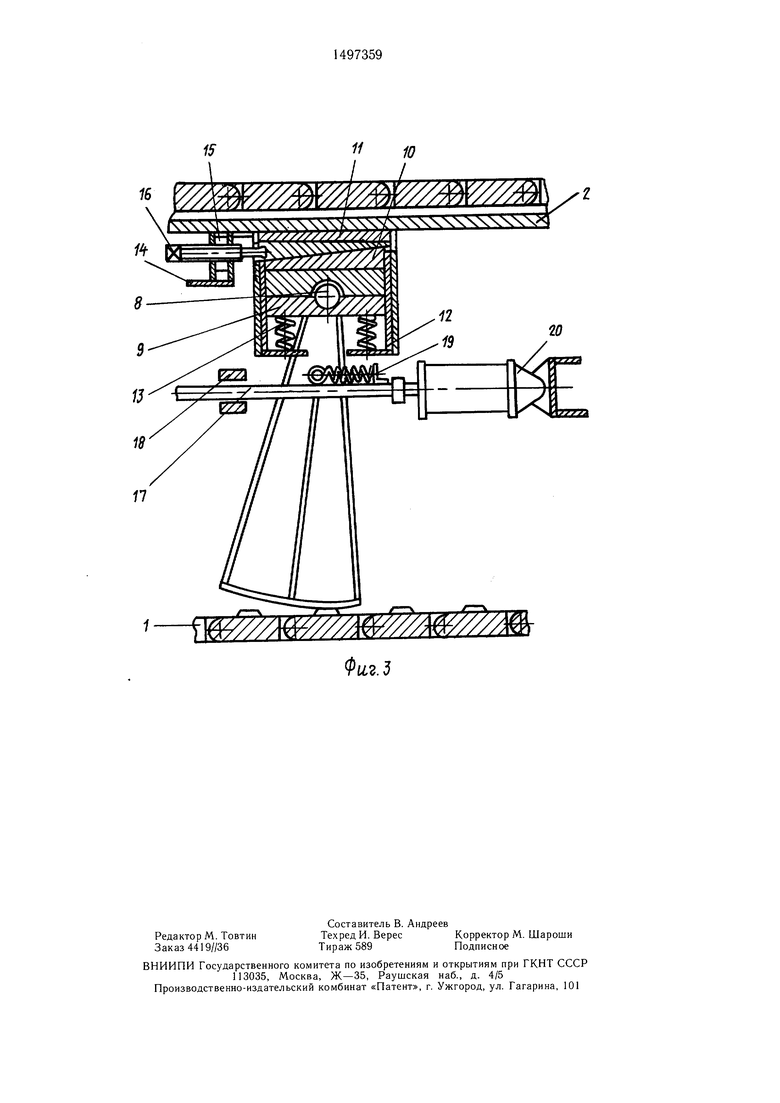
На фиг. 1 показан гусеничный ходовой механизм, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - механизм возврата секторов и механизм регулирования положения сектора по вертикали.
Гусеничный ходовой механизм включает 10 гусеничную ленту 1, раму 2, установленные на ней опорные элементы в два ряда, один из которых - с опорными элепривода, при этом штанга 17 перемещается в направляющих 18 по направлению движения гусеничного ходового механизма, что приводит к смещению относительно рамы точки крепления упругого элемента 19 и установке сектора 4 в начальное угловое положение, при котором он отклонен по направлению движения гусеничного ходового механизма, при этом положение боковой стороны сектора близко к вертикальному. При реверсировании направления движения происходит срабатывание привода 20 перемещения штанги, в той же последовательности, как описано выше, срабатывают элементы механизма возврата, при этом
ментами 3 и второй - с шарнирно
закрепленными секторами 4, упругие уст- - сектор приводится в новое начальное поло- ройства 5 между рамой 2 и опорными жение, соответствующее изменившемуся на- элементами 3, механизмы 6 регулирования положения секторов 4 по вертикали, механизм 7 возврата секторов.
Механизм регулирования положения сектора по вертикали состоит из установлен- 20 ного на оси 8 сектора ползуна 9, соприкасающегося с ним клина 10, установленных во взаимно перпендикулярных направляющих 11, закрепленных на раме 2, закрепленных на раме 2 упоров 12 с пружинами 13 и упора 14 с передачей винт- гайка, образованной гайкой 15 и винтом 16, пружины 13 соприкасаются с ползуном 9, а винт 16 связан с клином 10.
25
правлению движения. Начальные положения сектора при движении в одну и другую стороны зеркально симметричны относительно вертикальной оси.
При передвижении по ровной поверхности грунта рама 2 опирается на гусеничную ленту 1 через опорные элементы 3, при этом нагрузка на опорные элементы распределена равномерно и деформация упругих устройств 5 соответствует номинальной нагрузке на элемент и недостаточна для полного выбора зазора между опорной поверхностью сектора 4 и гусеничной ленты 1.
Механизм 7 возврата секторов включает
При наезде на неровность нагрузка на штангу 17 в направляющих 18, установ- 0 опорных элементах перераспределяется, что ленных на раме 2, упругие элементы 19,вызывает дальнейшее деформирование упру- установленные между секторами 4 и штан-гих устройств 5 опорных элементов 3, рас- гой 17, привод 20 возвратно поступа-положенных над неровностями, что вызывает тельного перемещения штанги, органы уп-полное исчезновение зазора между гусенич- равления которым сблокированы с органа-ной лентой и сектором, начинается пере- ми управления приводом гусеничного ходо-35 катывание сектора 4 по гусеничной лен- вого механизма.те 1. Это сопровождается деформированием
Перед началом работы секторы 4 с по- мощью механизма регулирования положения по вертикали относительно рамы устанавливаются так, чтобы зазор между цилиндрической опорной поверхностью сектора 4 и гусеничной лентой 1 был равен
40
упругого элемента 19. После преодоления неровностей нагрузка на сектор исчезает, он теряет контакт с гусеничной лентой 1 и под действием энергии сдеформированного упругого элемента 19 возвращается в начальное положение.
предельной установленной деформации упругих устройств 5 между рамой 2 и опорными элементами 3. Этого добиваются, вращая ручным инструментом винт 16, благодаря наличию гайки 15 и упора 14 для гайки перемещают связанный с винтом клин 10. Перемещение клина приводит к подъему или опусканию ползуна 9 в направляющих 11 с установленной на нем
Формула изобретения
45 1- Гусеничный ходовой механизм, содержащий раму, закрепленные на ней опорные элементы, расположенные в два продольных ряда, один из которых закреплен шарнирно, направляющее колесо, привод и гусеничную ленту, охватывающую опор- осью 8, а вместе с ней шарнирно закреп- 50 ные элементы и направляющее колесо, ленного на ней сектора 4. При этом про- отличающийся тем, что, с целью повышения исходит деформирование установленных наизносостойкости ходового механизма, кажупорах 12 пружин 13, удерживающихдый из опорных элементов, размещенных
ползун 9 в контакте с клином 10.в ряду с внешней стороны рамы, выполВключение органов управления приводомнен в форме сектора, с цилиндрической
гусеничного ходового механизма и сблоки- 55 опорной поверхностью, вершиной шарнирно рованных с ними органов управления при-закрепленного посредством оси на раме,
водом 20 возвратно-поступательного переме-причем между цилиндрической опорной пощения штанги вызывает срабатывание этоговерхностью сектора и внутренней поверхпривода, при этом штанга 17 перемещается в направляющих 18 по направлению движения гусеничного ходового механизма, что приводит к смещению относительно рамы точки крепления упругого элемента 19 и установке сектора 4 в начальное угловое положение, при котором он отклонен по направлению движения гусеничного ходового механизма, при этом положение боковой стороны сектора близко к вертикальному. При реверсировании направления движения происходит срабатывание привода 20 перемещения штанги, в той же последовательности, как описано выше, срабатывают элементы механизма возврата, при этом
сектор приводится в новое начальное поло- жение, соответствующее изменившемуся на-
сектор приводится в новое начальное поло- жение, соответствующее изменившемуся на-
правлению движения. Начальные положения сектора при движении в одну и другую стороны зеркально симметричны относительно вертикальной оси.
При передвижении по ровной поверхности грунта рама 2 опирается на гусеничную ленту 1 через опорные элементы 3, при этом нагрузка на опорные элементы распределена равномерно и деформация упругих устройств 5 соответствует номинальной нагрузке на элемент и недостаточна для полного выбора зазора между опорной поверхностью сектора 4 и гусеничной ленты 1.
При наезде на неровность нагрузка на опорных элементах перераспределяется, что вызывает дальнейшее деформирование упру- гих устройств 5 опорных элементов 3, рас- положенных над неровностями, что вызывает полное исчезновение зазора между гусенич- ной лентой и сектором, начинается пере- катывание сектора 4 по гусеничной лен- те 1. Это сопровождается деформированием
упругого элемента 19. После преодоления неровностей нагрузка на сектор исчезает, он теряет контакт с гусеничной лентой 1 и под действием энергии сдеформированного упругого элемента 19 возвращается в начальное положение.
Формула изобретения
ностью нижней ветви гусеничной ленты образован зазор, а гусеничный ходовой механизм снабжен механизмами возврата секторов и регулирования их положения по вертикали.
2. Механизм по п. 1, отличающийся тем, что механизм возврата секторов включает в себя приводную горизонтально установленную штангу, взаимодействующую с направляющими, выполненными на раме, упругие элементы, размещенные между секторами и щтангой, при этом привод перемещения щтанги сблокирован с органами управления гусеничного ходового механизма.
6
3. Механизм по п. 1, отличающийся тем, что механизм регулирования положения сектора по вертикали включает в себя закрепленные на раме взаимно перпендикулярные направляющие, установленный на них ползун с осью крепления сектора, клин, взаимодействующий с ползуном. и винтовую передачу, соединенную с клином, причем ползун установлен в направляющих на пружинах с возможностью перемещения в плоскости, перпендикулярной опорной поверхности, а клин установлен с возможностью возвратно-поступательного перемещения в направлении, параллельном опорной поверхности.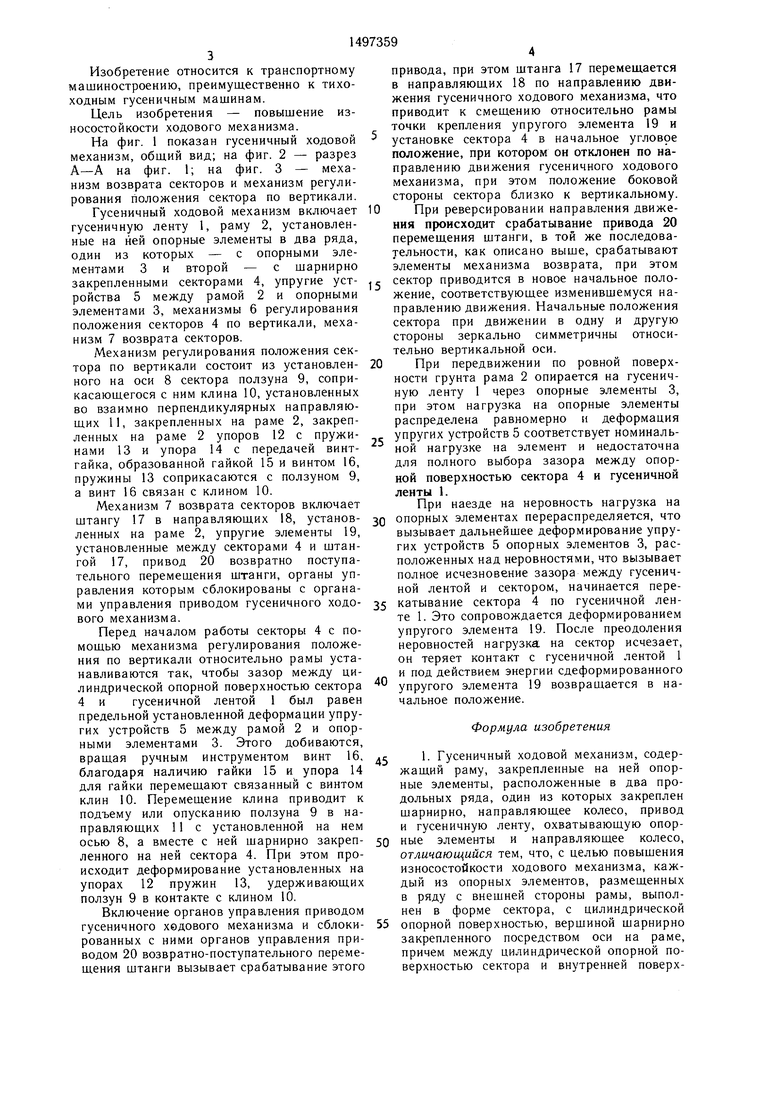
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть транспортного средства | 1991 |
|
SU1784519A1 |
| Ходовая часть гусеничной машины | 1990 |
|
SU1768433A1 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАКТОРА | 1999 |
|
RU2162629C2 |
| Флюидная транспортная гусеница | 1985 |
|
SU1438992A1 |
| Виброизолирующая подвеска объекта | 1983 |
|
SU1123917A1 |
| КРЕПЛЕНИЕ МОДУЛЯ НА АВТОМОБИЛЬ И УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ МОДУЛЬ С ЭТИМ КРЕПЛЕНИЕМ | 2017 |
|
RU2652483C1 |
| Ходовая часть транспортного средства | 1990 |
|
SU1717464A1 |
| Стенд для испытания колес под нагрузкой | 1979 |
|
SU954844A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
Изобретение относится к транспортному машиностроению и обеспечивает повышение износостойкости ходового механизма. Гусеничный ходовой механизм включает гусеничную ленту 1, раму 2 и установленные на ней в два ряда опорные элементы, один из которых содержит шарнирно закрепленные сектора 4, механизм 6 регулирования секторов 4 по вертикали и механизм 7 возврата секторов. Перед началом работы сектора 4 устанавливают при помощи механизмов 6 таким образом, что между цилиндрической поверхностью сектора и гусеничной лентой образуется зазор. При движении по ровной местности рама опирается на гусеничную ленту через опорные элементы, при наезде на неровности сектор 4 перекатывается по гусеничной ленте, после неровности сектор возвращается в исходное положение. 2 з.п. ф-лы, 3 ил.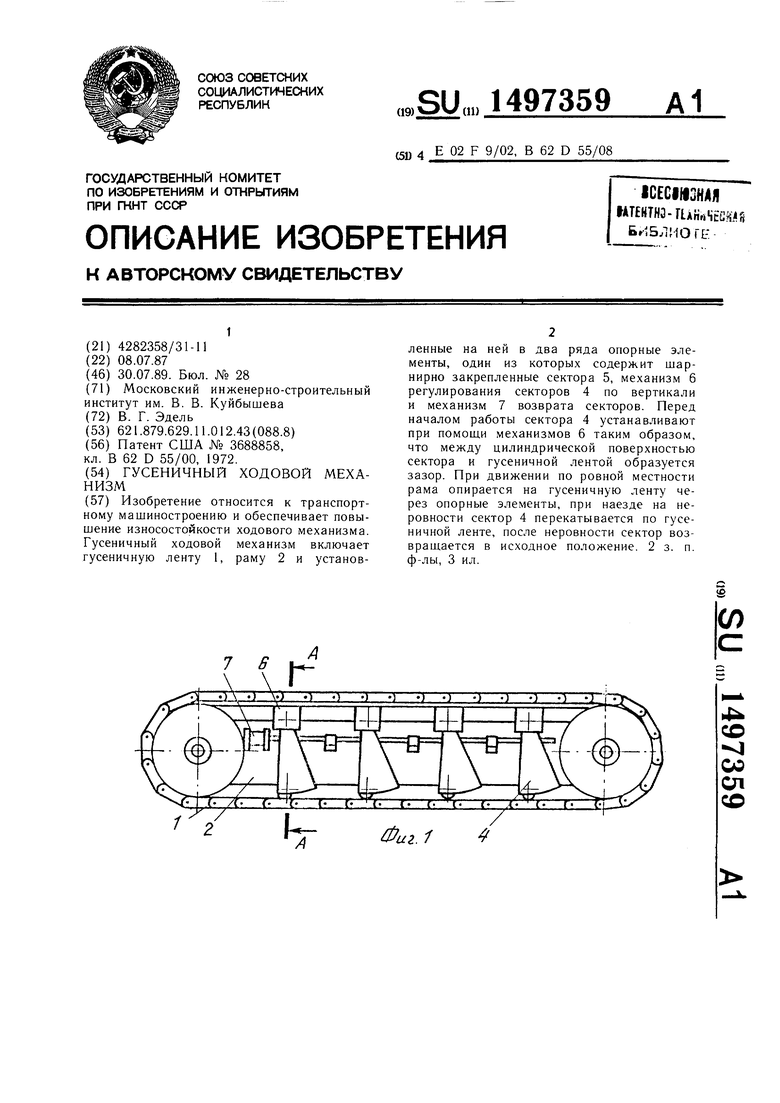
Ф( 2.2
16
у,
лг.1
11 I
10
/т
| Патент США № 3688858, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
