(21)4330535/31-12
(22)17.11.87
(46) 30.07.89. Екш. № 28
(72) И.В. Бутенин, А.Б. Мтсайлин
и Л.Д. Иванов
(53)681.136.51 (008.8)
(56)Авторское свидетельство СССР № 1080190, кл. G 09 В 23/06, 1983.
(54)УЧЕБНЫЙ ПРИБОР ПО МЕХАНИКЕ
(57)Изобретение относится к учебным наглядным пособиям по теоретической механике и позволяет расширить демонстрационные возможности посредством показа принципа гироскопической ком- пенсаш1И постоянно действующего внешнего возмущения. Учебный прибор содержит основание 1, платформу 2, к которой крепятся полуоси 3, 4, уста,новленные вдоль ее продольной оси, имитатор внешнего дестабилизгфующего момента, который содержит редуктор 7,
двигатель 8 раскачки платформы и датчик углов 9, двухстепенной гироузел 12 с гиромотором 13, которьй укреплен в полураме 14 и соединен с ней консольно с помощью штанги 15, а полурама своими полуосями 16, 17 укреплена D подшипниках 18, 19, при этом ось прецессии гироузла, вектор кинетического момента гиромотора и продольная ось итанги 15 взаимно перпендикулярны. При демонстрации гиромо- тор вначале вдвинут внутрь полурамы 14 и заарретирован гайкой 25, затем при разарретировании гироузла отмечают уменьшение угла качки, а при выдвижении гиромотора 13 из полурамы на длину штанги 15 наблюдают еще, большее улучшение стабилизирующих jca- честв гироузла 12 за счет возникновения дополнительного стабилизирующего момента, вызванного боковой маятнико- востью, 4 ил.
Id
(Л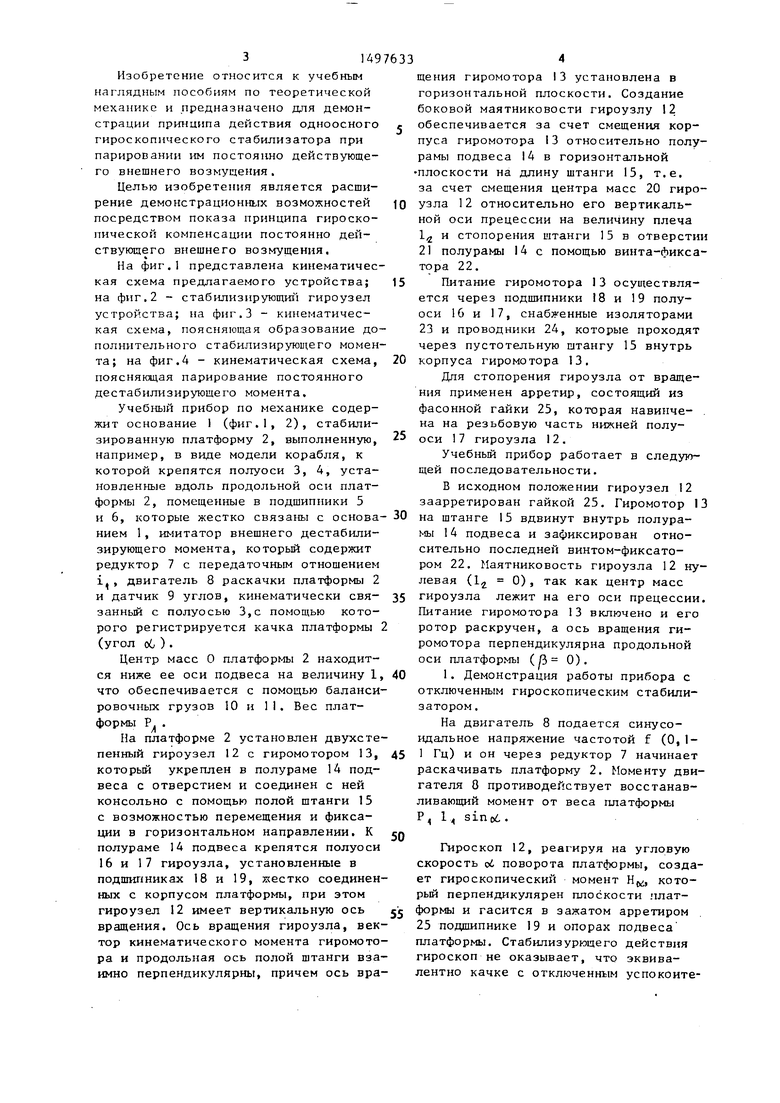
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Учебный прибор по механике | 1988 |
|
SU1672516A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| СПОСОБ ПОДГОТОВКИ К РАБОТЕ ГИРОСИСТЕМЫ С ДВУХСТЕПЕННЫМ ПОПЛАВКОВЫМ ГИРОСКОПОМ | 2002 |
|
RU2232378C1 |
Изобретение относится к учебным наглядным пособиям по теоретической механике и позволяет расширить демонстрационные возможности посредством показа принципа гироскопической компенсации постоянно действующего внешнего возмущения. Учебный прибор содержит основание 1, платформу 2, к которой крепятся полуоси 3,4, установленные вдоль ее продольной оси, имитатор внешнего дестабилизирующего момента, который содержит редуктор 7, двигатель 8 раскачки платформы и датчик углов 9, двухстепенной гироузел 12 с гиромотором 13, который укреплен в полураме 14 и соединен с ней консольно с помощью штанги 15, а полурама своими полуосями 16, 17 укреплена в подшипниках 18, 19, при этом ось прецессии гироузла, вектор кинетического момента гиромотора и продольная ось штанги 15 взаимно перпендикулярны. При демонстрации гиромотор вначале вдвинут внутрь полурамы 14 и заарретирован гайкой 25, затем при разарретировании гироузла отмечают уменьшение угла качки, а при выдвижении гиромотора 13 из полурамы на длину штанги 15 наблюдают еще большее улучшение стабилизирующих качеств гироузла 12 за счет возникновения дополнительного стабилизирующего момента, вызванного боковой маятниковостью. 4 ил.
о
sl
Од
00
со
Фиг. 1
3149
Изобретение относится к учебным наглядным пособиям по теоретической механике и предназначено для демонстрации принципа действия одноосного гироскопического стабилизатора при парировании им постоянно действующего внешнего возмущения.
Целью изобретения является расширение демонстрационных возможностей посредством показа принципа гироскопической компенсации постоянно дей- ствунлаего внешнего возмущения,
ъ
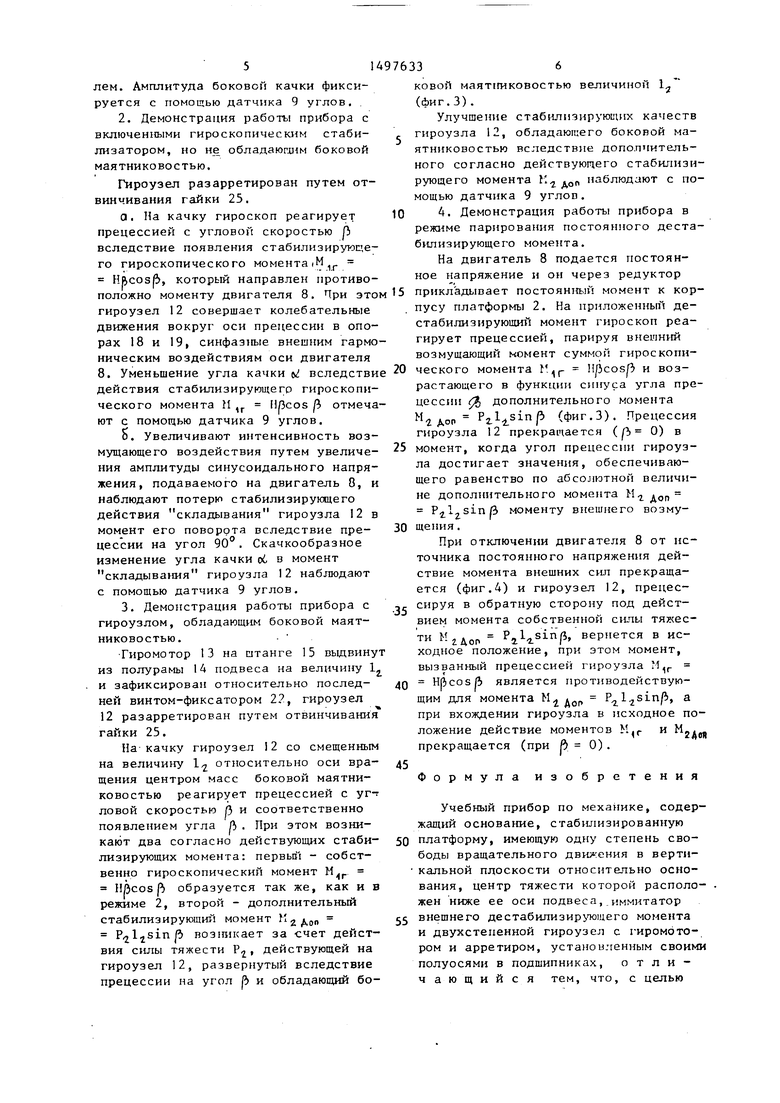
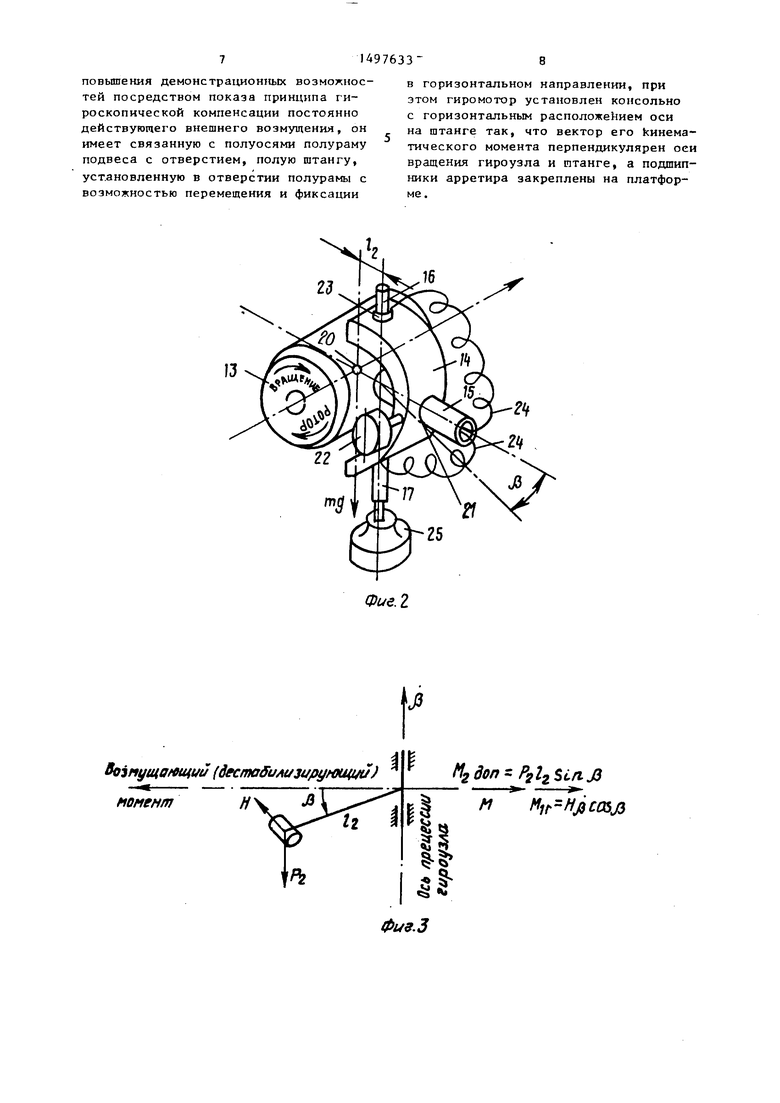
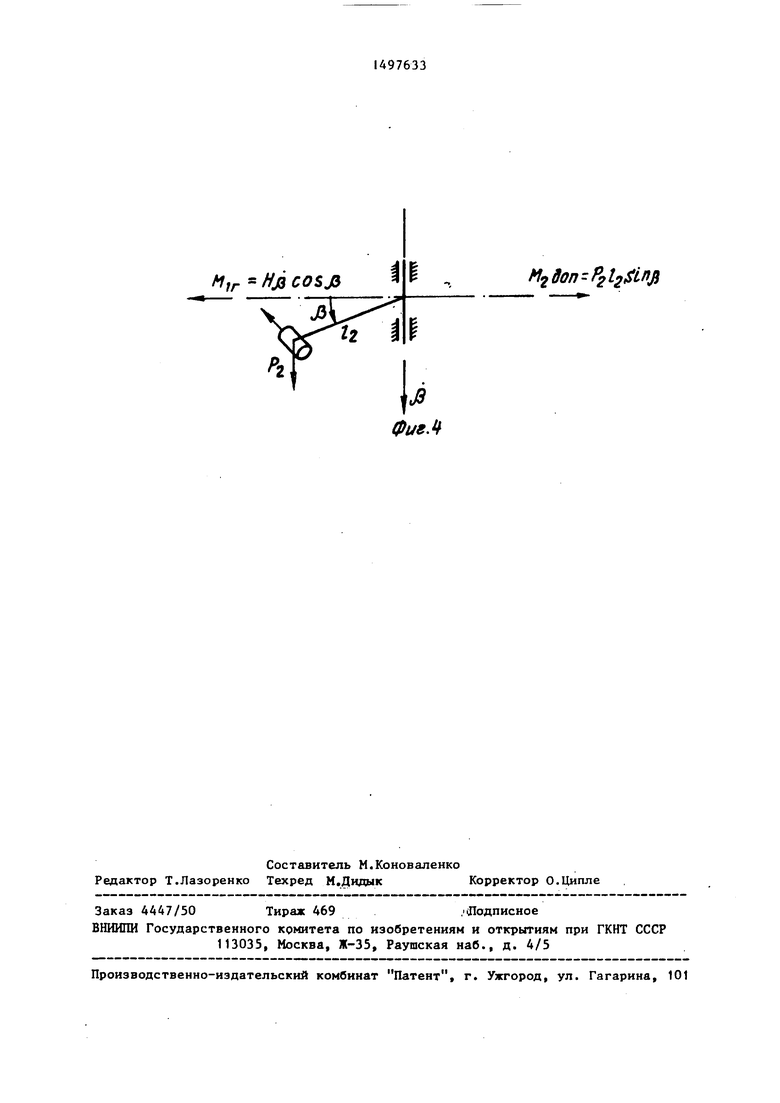
На фиг.1 представлена кинематическая схема предлагаемого устройства; на фиг,2 - стабилизирующий гироузел устройства; на фиг,3 - кинематическая схема, поясняющая образование дополнительного стабилизирующего момента; на фиг,4 - кинематическая схема, поясняющая парирование постоянного дестабилизирующего момента.
Учебный прибор по механике содержит основание 1 (фиг,1, 2), стабилизированную платформу 2, выполненную, например, в виде модели корабля, к которой крепятся полуоси 3, 4, установленные вдоль продольной оси платформы 2, помещенные в подшипники 5 и 6, которые жестко связаны с основа- нием 1, имитатор внешнего дестабилизирующего момента, которьй содержит редуктор 7 с передаточным отношением i., двигатель 8 раскачки платформы 2 и датчик 9 углов, кинематически свя- занньш с полуосью 3,с помощью которого регистрируется качка платформы (угол oL ) ,
Центр масс О платформы 2 находится ниже ее оси подвеса на величину 1 что обеспечивается с помощью балансировочных грузов 10 и 11, Вес платформы Р. ,
На платформе 2 установлен двухстепенный гироузел 12 с гиромотором 13, который укреплен в полураме 14 подвеса с отверстием и соединен с ней консольно с помощью полой штанги 15 с возможностью перемещения и фиксации в горизонтальном направлении, К полураме 14 подвеса крепятся полуоси 16 и 17 гироузла, установленные в ПОДШИТ ник ах 18 и 19, жестко соединенных с корпусом платформы, при этом гироузел 12 имеет вертикальную ось вращения. Ось вращения гироузла, вектор кинематического момента гиромото ра и продольная ось полой штанги взаимно перпендикулярны, причем ось вращения гиромотора I3 установлена в горизонтальной плоскости. Создание боковой маятниковости гироузлу 12 обеспечивается за счет смещения корпуса гиромотора 13 относительно полурамы подвеса 14 в горизонтальной плоскости на длину штанги 15, т,е, за счет смещения центра масс 20 гироузла 12 относительно его вертикальной оси прецессии на величину плеча 1 и стопорения штанги 15 в отверсти 21 полурамы 14 с помощью винта-фиксатора 22,
Питание гиромотора 13 осуществляется через подшипники 18 и 19 полуоси 16 и 17, снабженные изоляторами 23 и проводники 24, которые проходят через пустотельную штангу 15 внутрь корпуса гиромотора 13,
Для стопорения гироузла от вращения применен арретир, состоящий из фасонной гайки 25, которая навинчена на резьбовую часть нижней полуоси 17 гироузла 12,
Учебный прибор работает в следующей последовательности,
В исходном положении гироузел 12 заарретирован гайкой 25, Гиромотор 1 на штанге 15 вдвинут внутрь полурамы 14 подвеса и зафиксирован относительно последней винтом-фиксатором 22, Маятниковость гироузла 12 нулевая (Ij 0), так как центр масс гироузла лежит на его оси прецессии Питание гиромотора 13 включено и его ротор раскручен, а ось вращения гиромотора перпендикулярна продольной оси платформы (/3 0),
1, Демонстрация работы прибора с отключенным гироскопическим стабилизатором ,
На двигатель 8 подается синусоидальное напряжение частотой f (О,1- 1 Гц) и он через редуктор 7 начинает раскачивать платформу 2, Моменту двигателя 8 противодействует восстанавливающий момент от веса платформы Р, 1 sin Oil,,
Гироскоп 12, реагируя на угловую скорость об поворота платформы, создает гироскопический момент Н,,, который перпендикулярен плоскости платформы и гасится в зажатом арретиром 25 подшипнике 19 и опорах подвеса платформы, Стабилизурющего действия гироскоп не оказывает, что эквивалентно качке с отключенным успокоите4976336
ковой маят1Гиковостью величиной 1 (фиг.З).
Улучшение стабилизирующих качеств - гироузла 12, обладаюшего боковой ма- ятниковостью вследствие дополпитель- ного согласно действующего стабилизирующего момента М .f, наблюдают с помощью датчика 9 углов.
10 - Демонстрация работы прибора в режиме парирования постоянного дестабилизирующего момента.
На двигатель 8 подается постоянное напряжение и через редуктор положно моменту двигателя 8. При этом 15 прикладывает постоянный момент к корлем. Амплитуда боковой качки фиксируется с помощью датчика 9 углов.
Гироузел разарретирован путем отвинчивания гайки 25.
а. Па качку гироскоп реагирует прецессией с угловой скоростью р вследствие появления стабилизирующего гироскопического моментаiM HBcos(i, который направлен противогироузел 12 совершает колебательные движения вокруг оси прецессии в опорах 18 и 19, синфазные внешним гармоническим воздействиям оси двигателя 8. Уменьшение угла качки ; вследствие действия стабилизирующего гироскопического момента М , МПсоБ р отмечают с помощью датчика 9 углов.
о. Увеличивают интенсивность возмущающего воздействия путем увеличения амплитуды синусоидального напряжения, подаваемого на двигатель 8, и наблюдают потерю стабилизирующего
действия складывания
гироузла 12 в момент его поворота вследствие прецессии на угол 90. Скачкообразное изменение угла качки о в момент складывания гироузла 12 наблюдают с помощью датчика 9 углов.
Тиромотор 13 на штанге 15 выдвину из полурамы 14 подвеса на величину 1 и зафиксирован относительно последней винтом-фиксатором 22, гироузел 12 разарретирован путем отвинчивания гайки 25.
На качку гироузел 12 со смещенным на величину 1 относительно оси вращения центром масс боковой маятни- ковостью реагирует прецессией с угловой скоростью |3 и соответственно появлением угла А. При этом возникают два согласно действующих стабилизирующих момента: первьш - собственно гироскопический момент М Hftcos р) образуется так же, как и в режиме 2, второй - дополнительный стабилизирующий момент гДоп P ljsinp возникает за счет действия силы тяжести Р, действующей на гироузел 12, развернутый вследствие прецессии на угол jb и обладающий бо0
5
0
5
пусу платформы 2. На приложенный дестабилизирующий момент гироскоп реагирует прецессией, парируя внешний возмущающий момент суммой гироскопического момента Hpcos/3 и возрастающего в функции синуса угла прецессии ( дополнительного момента М д,р P2.1.sin|) (фиг.З). Прецессия гироузла 12 прекращается (, р) - 0) в момент, когда угол прецессии гироузла достигает значения, обеспечивающего равенство но абсолютной величине дополнительного момента MI Aon Pj l sinfl моменту внешнего возмущения .
При отключении двигателя 8 от источника постоянного напряжения действие момента внешних сил прекращается (фиг.4) и гироузел 12, прецес- сируя в обратную сторону под действием момента собственной силы тяжес0
ти М
г Доп
,
вернется в исходное положение, при этом момент, вызванный прецессией гироузла М Hftcosft является противодействующим для момента М до при вхождении гироузла в исходное положение действие моментов М и М прекращается (при ft 0).
2A01I
45
Формула изобретения
Учебный прибор по механике, содер- жапщй основание, стабилизированную
50 платформу, имеющую одну степень свободы вращательного движения в верти- кальной плоскости относительно основания, центр тяжести которой расположен ниже ее оси подвеса, иммитатор
55 внешнего дестабилизирующего момента и двухстепенной гироузел с гиромЬто- ром и арретиром, установ.ченным своими полуосями в подшипниках, отличающийся тем, что, с целью
повьшения демонстрационных возможностей посредством показа принципа гироскопической компенсации постоянно действующего внешнего возмущения, он имеет связанную с полуосями полураму подвеса с отверстием, полую штангу, установленную в отверстии полурамы с возможностью перемещения и фиксации
I - О
Se nymof uu (dKmoffuMSifpyfW) Л г / / ZgSt/ijJ
.. - .
момент/f Af;/.///0Vfl
( g «
в горизонтальном направлении, при этом гнромотор установлен консольно с горизонтальным расположением оси на штанге так, что вектор его kинeмa- тического момента перпендикулярен оси вращения гироузла и штанге, а подшипники арретира закреплены на платформе.
Фи.г
«
;г J9 5
i
2 7/7--5/ / jj
