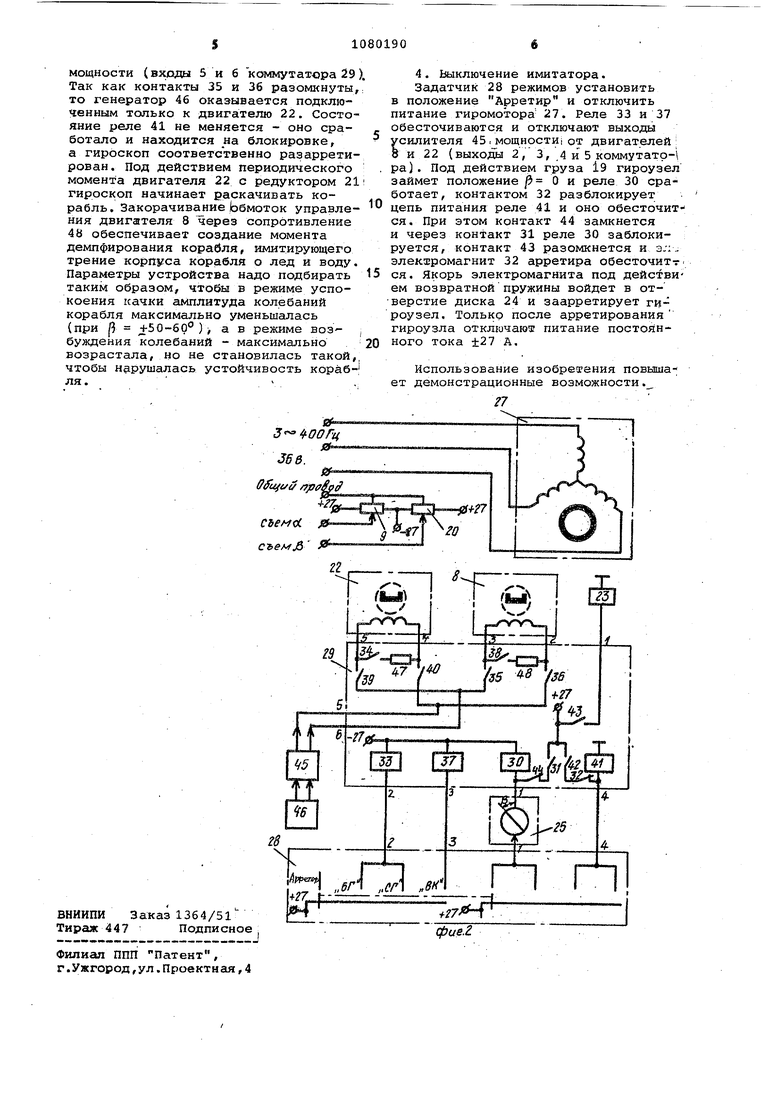
Изобретение относится к учебным пособиям и может быть использовано для имитации бортовых колебаний корабля . Известен имитатор успокоителя качки корабля, содержащий модель корабля, в корпусе которой на полу осях с подшипниками установлен ги) роузал с нижней маятнйковостью, ось подвеса гироузла, перпендикулярна диаметральной плоскости модели корабля и кинематически через редуктор связана с двигателем, закреплен ным на корпусе модели корабля l . Недостатком известного имитатора являются невысокие демонстрационные возможности. I- Цель изобретения - повышение демонстрационных возможностей. Поставленная цель достигается тем, что имитатор успокоителя качки корабля, содержащий модель корабля, в корпусе которой на полуосях с под шипниками установлен гироузел с ниж ней маятнйковостью, ось подвеса ги роузла перпендикулярна диаметральной плоскости модели корабля и кине матически через редуктор связана с двигателем, закрепленным на корпу се модели корабля, имеет задатчик режимов, управляемый коммутатор, генератор, усилитель мощности, датчик углов, дополнительные редуктор и двигатель и арретир гироузла , а корпус модели корабля содержит полуоси в диаметральной плоскости и подшипники, при этом выходы задатчика режимов связаны с первыми входами управляемого коммутатора, вторы входы которого через усилитель мощности подсоединены к выходам генера тора, выход управляемого коммутатора связан с входом арретира гироузла , а управляющие выходы управляемого коммутатора электрически подключены к обмоткам двигателей, причем полуоси в диаметральной плоскости корпуса модели корабля установлены в под шипниках основания корпуса и кинема тически связаны с датчиком углов, расположенным на оси двигателя, и через дополнительный редуктор с дополнительным двигателем. На фиг. 1 .представлена кинематическая схема устройства} на фиг. 2 электрическая принципиальная схема (пунктиром выделены основные функциональные блоки устройства). .Существо изобре.тения относится к функциональным блокам и связям между ними, а их элементное содержание может быть самым разнообразным. Имитатор (фиг. 1J состоит из модели корабля в виде корпуса 1, к которому в диаметральной плоскости крепятся полуоси 2 и 3, установленные в подшипниках 4 и 5 корпуса б оснований устройства. С полуосью 2 через редуктор 7 с передаточным отношением кинематически связан двигатель8 раскачки корабля. Качка корабля (уголоб ) регистрируется датчиком 9 углов, кинематически связанным с полуосью 3. Центр тяжести корабля 0 находится ниже оси подвеса корпуса на величину f, что обеспечивают балансировочные грузы 10 и 11 Вес корабля Р . . Двухстепенный гироскоп - гироузел 12 своими полуосями 13 и 14. установлен в подшипниках 15 и 16 кронштейнов 17 и 18 корпуса 1 корабля. Гироскоп имеет вертикальную ось вращения ротора Гиромотора (вектора ; кинематического момента Н ) и нижнюю маятниковость, создаваемую грузом 19 (весом Р2 ) за счет его смещения вдоль оси ротора гиромотора на вели/чину 1 . Угол отклонения & гироскопа 12 (вектора Н ) регистрирует датчик 20 угла. С осью гиррузла (с по-, луосью 14) через дополнительный редуктор 21 с передаточным отношением i кинематически связан дополнительный двигатель 22, который вместе с редуктором 21 создает соответствующее демпфирование, играя роль тормоза в схеме Шлика. Для устранения вращения гироузла применен арретир, состоящий из втяжного электромагнита 23, диска 24 арреуира, закрепленного жестко на полуоси 13 и сигнализатора 25 нулевого положения. Гироскоп арретируется в положении,- когда вектор Н перпендикулярен плоскости палубы 26 (уголи 0). Возможно и другое конструктивное выполнение арретира. В .соответствии с электрической схемой на фиг. 2 устройство содержит гиромотор 27, например асинхронный, питаемый переменным напряжением 36 В, частотой 400 Гц, В качестве двигателя 8, который имитирует качку корабля от волнения моря, дополнительного двигателя 22, который играет роль тормоза (демпфера) и может служить для раскачки корабля, в спокойной воде, рационально применить; двигатели постоянного тока с постоянными магнитами, обладающие хорошими механическими характеристиками. В .качестве исполнительного элемента арретира применен втяжной электромагнит 23, а в качестве сигнализатора - контактный диск 24. Все эти ; элементы находятся на модели корабля, Блоки, переч.исляемые ниже, можно оформить в виде пульта управления и их удобнее расположить вне модели корабля;- Режимы работы устройства определяет задатчик 28 режимов, представляющий четырехпозиционный, вухполосный галетный переключатель.
имеющий четыре выхода (управляющих), соединенных с соответствующими вхо- ( дами управляемого коммутатора 29, Коммутатор 29 имеет четыре управляемых входа, два сигнальных входа и пять выходов. В качестве примера коммутатор построенна релейных элементах: реле 30 с замыкающим 31 и размыкающим 32 контактами, реле 33 с тремя парами замыкающих контак ;.э тов 34, 35 и 36, реле 37 также с О тремя парами замыкающих контактов 3.8, 39 и 40, реле. 41 с двумя парами замыкающих контактов 42 и 43 и napq размыкающих контактов 44. На пятый и шестой входы коммутатора 2 подклю-15 чен усилитель 45 мощности, соединенный последовательно с генератором 46, формирующим напряжение с частотами от 0,1 до 1 Гц, что соответствует спектру морского волнения. 20 В цепи обмоток управления двигате- лей можно включать.сопротивления 48,
- Имитатор работает в следующей по- следовательности: гироскопический. .25 успокоитель отключен, гироскопический успокоитель включен, использование гироскопа для раскачки модели корабля, выключение устройства. Предварительно подают питание 36 в, дО 400 Гц и постоянное ±27 В. После набора гиромотором. оборотов можно переходить к демонстрации.
1. Работа имитатора с отключенным гироскопическим успокоителем. . ,г
Устанавливают задатчик 28 режимов в положение БГ - без гироскопического успокоителя. При этом сработает реле 33 и контактом 34 закоротит обмотку управления двигателя 22, Q а контактами 35 и 36 подключит обмотку управления двигателя 8 (выходы 5 и 6 коммутатора 29) к двум выходам усилителя 45 мощности. Одновременно (так как после очередной де- . онстрации гироузел 12 заарретирован и угол р 0) через контактный диск 25 (он пропускает сигнал только при fJ О) подается +27 на реле 30, которое, срабатывая, самоблокируется контактом 31, а контактом 32 разывает цепь блокировки реле 41. лектромагнит 23 остается .обесточенным, а гироузел заарретированным. С генератора 46 через усилителТ 45 ощности на обмотку управления дви- 55 гателя 8 начинает поступать синусоИдальное напряжение частоты -f (частота может регулироваться в пределах, от 0,1 до 1 Гц). Двигатель 8 посредством редуктора 7 начинает раскачи- 60 вахь корабль. Моменту двигателя 8 ротиводействует восстанавливающий
омент от веса корабля Р 1, . мплитуду бортовой качки фиксирует атчик 9 угла. Гироскоп 12, реаги- 5
уя на угловую скорость oi , создает ; гироскопический момент Н «t , который 1 перпендикулярен диаметральной плоскости и гасится в опорах 4 и 5 подвеса корабля. Стабилизирующего действия гироскоп не оказывает, что эквивалентно качке корабля на море с отключенным успокоителем,
2,Работа имитатора с включенным гироскопическим успокоителем.
Устанавливают эадатчик 28 режимов в положение СГ - с гироскопическим успокоителем. Реле 33 и его цепи остаются в прежнем положений. Срабатывает реле 41 и контактом 44 размыкает цепь блокировки реле 30; Контакт 31 становится; разомкнутым, а контакт 32 замкнутым. Одновременно реле/41, своим контактом 42 само-, блокирует-ся, . а контактом 43 замыкает цепь электромагнита 23, Электромагнит втягивает якорь, выводя его из отверстия диска 24, и гироузел разарретируется. Теперь на качку корабля гироскоп реагирует процессией с угловой скоростью / , которая за «чет. демпфера - редуктор 21 с двигателем 22 (обмотка управления его закорочена контактом 34), создает
момент -р (где | крутизна
скоростной характеристики двигателя) обеспечивающий рассеивание энергии при качке корабля. Кроме того, прецессия обуславливает появление гиро-скопического момента И 8 cosp , оказывающего стабилизирующее действие
при качке. Необходимое демпфр рование обеспечивается передаточным отношением i редуктора 21 и включением в цепь обмотки управления двигателя 22 активного сопротивления 47. Угол качки определяют датчиком 9 углов. Сравнивая амплитуды углов качки с
заарретированным и разарретированным гироскопом, можно определить э ффективность действия гироскопического успокоителя качки. Для контроля угла /3 Используется датчик 20 углов.
3.Работа имитатора в режиме раскачивания модели корабля,
....
Этот режим демонстрирует раскачивание корабля относительно продольной оси, что соответствует нахождению корабля во льдах, и гироскоп используют уже для целей воз.буждения качки. Для этого переключатель 28 устанавливают в положение ВК возбуждение качки. При этом реле 33 обесточивается и его контакты 34, 35 и 36 становятся разомкнутыми. Одновременно срабатывает реле 37 и контактом 38 шунтирует обмотку управления двигателя 8 через сопротивление 48, а контактами 39 и 40/ подключаеу двигатель 22 (выходы 4 и 5 кок1мутатора 29) к выходам усилителя
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
ИМИТАТОР УСПОКОИТЕЛЯ КАЧКИ |КОРАБЛЯ, содержащий модель корабля,: в корпусе которой на полуосях с подшипниками установлен .гироузел с нижней маятниковостыо, ось подвеса гироузла перпендикулярна диаметральной плоскости модели корабля и кинематически через редуктор связана с1 двигателем, закрепленным на корпусе модели корабля, о т л и ч а ю щ и йс я тем, что, с целью повышения « демонстрационных возмоя ностей, он имеет задатчик режимов, управляемый коммутатор, генератор, усилитель мощности, датчик углов, дополнительные редуктор..и двигатель и арретир гироуэла,, а корпус модели корабля содержиэ полуоси в диаметральной плоскости и подшипники, при этом выходы задатчика режимов связаны с первыми входами управляемого коммутатора, вторые входы которого, через усилитель мощности подсоединены к выходам генератора, выход управляемого коммутатора связан с входом арретира :гироуэла, «цуправляющие выходы управляемого .коммутатора элект рически подключены к обмоткам дви- S гателей, причем, полуоси в диаметральной плоскости корпуса модели корабля установлены в подшипниках осноCZ вания корпуса и кинематически связаны с датчикомуглов, расположенным на оси двигателя, и через допол- .нительный редуктор с дополнительным двигателем. pu.i.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Граммель Р., Гироскоп, его теория и применение | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТРАНЕНИЯ СКОЛЬЖЕНИЯ КОЛЕС АВТОМОБИЛЕЙ | 1920 |
|
SU292A1 |
| . | |||
