Изобретение относится к кузнечно-прессо- вому ма11 инострое 1ию, в частности к конструкции кривошипных пр.ессов.
Цель и:юбретения - уменьшение энергозатрат и увеличение КПД пресса.
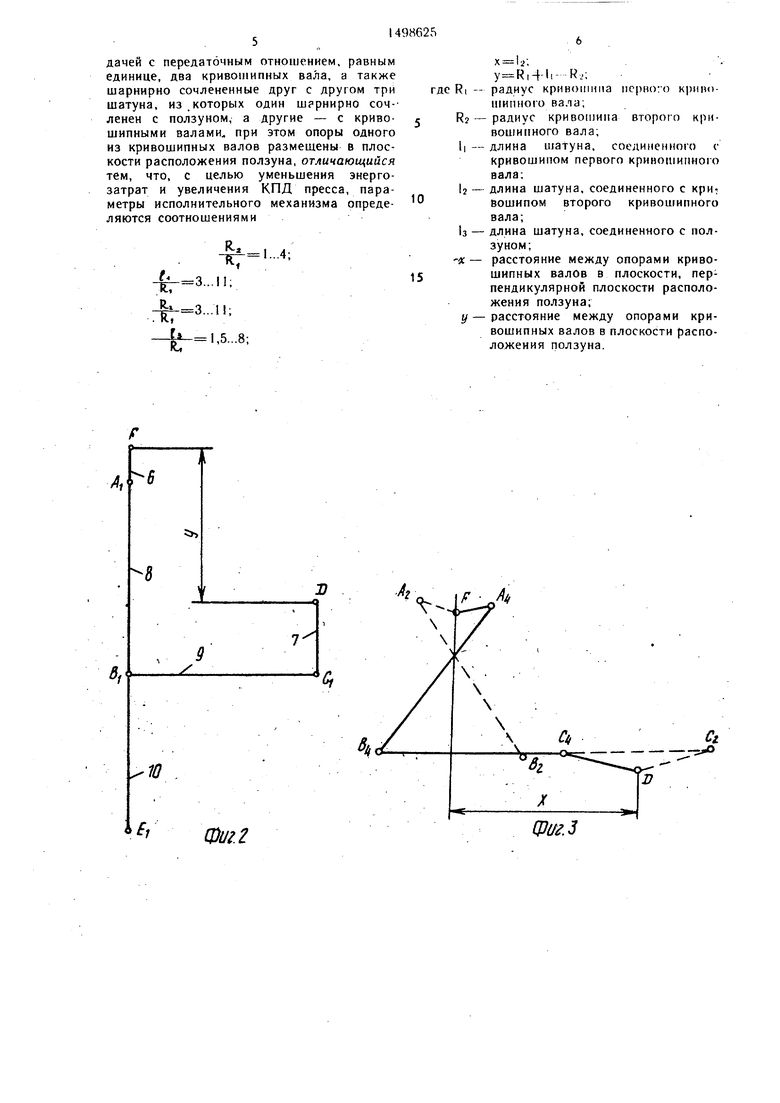
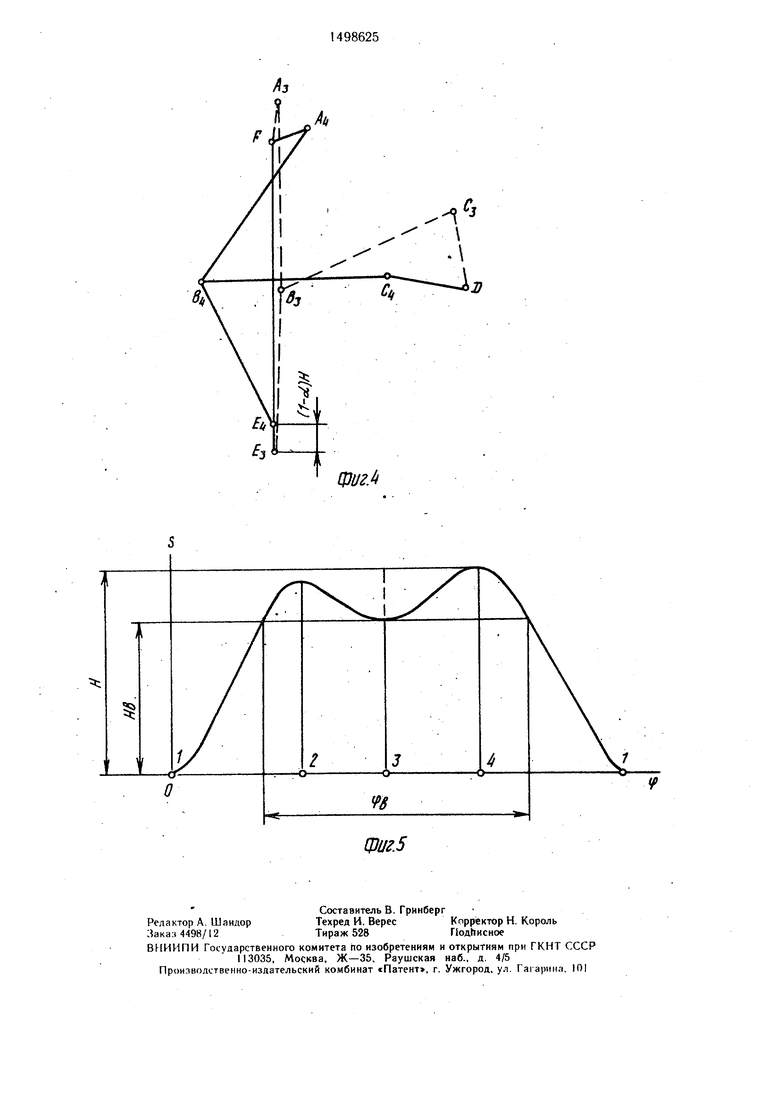
, На фиг. 1 показан исполнительный механизм, общий вил; на фиг. 2-4- )а з- личиые положении звеньев исполнительного механизма; на фиг. 5 - - гр.йфик, перемещения ползуна по yr/iy -поворота кривошипа.
Исполнительный механизм содержит размешенные в опорах 1 и, 2 станины 3 и связанные Н1естерпями 4 и 5 одинакового делительного диаметра два кривошипных вала с крирошипами 6 и 7, а также сочлененные друг с другом |,1атупы 8- 10. Шатун 8 нарнирно сочленен с кривошипом 6, П1атун 9 сочленен с кривопжном 7, а и1атун 10 - с ползуном 11. Опоры, 1 криво1нипного вала с. кривопгипом 6 размешены в плоскости расположения ползуна 11.
Параметры исполнительного лтеханизма определяются соотношениями
R2/R, 1...4;
Ii/Ri 3...n;
l2/R,:3...l.l;
b/R i-,5...8;
. .
+ l|.-R,j;
где RI - радиус кривошипа 6; Ra -- радиус кривошипа 7; Ь - длина шатуна 8; 12 - длина шатуна 9;
длина шатуна 0;
X - расстояние межДу опорами 1 и 2 в плоскости, перпендикулярной плоскости расположений на 11;
у - расстояние между опорами 1 и. 2 в плоскости расположения ползуна 11-;Общими условиями существования механизма является условие
(li-Ri) + {l2 -R)Vx4y ;
Точками А, В, С, D, Е и F {фиг. 1) обозначены шарниры связей кривошипов 6 и 7, а также шатунов 8-10 между собой, а также с ползунами 1 I и опорами 1 5 и 2. .
Исполнительный механизм работает следующим образом.
Исходными принимают положения звеньев механизма, показанные на фиг. 2. В этом случае ползун 11 находится в край- нем нижнем положении, а кривошип 6, шачуны 8 и 10 располагаются в одной плоскости, плоскости расположения ползуна 11.
При повороте кривошипа 6, например, 15 по часовой стрелке, кривошип 7 поворачивается на такой же угол против часовой стрелки.,
Перемещение шарниров AI и Ci кривошипов 6 и 7 преобразуется в переме- ш.ение шарнира Bi (общего для шатунов 8 и 9) который перемещается вправо-вверХ и через щатун 10 поднимает ползун 11 (фиг. 3), шарнирь А, В и С занимают при этом положении Аг, Bg и €2.
В дальнейшем шарнир В (фиг 4) 25 перемещается влево-вниз и шарниры А, В и С занимают положения Аз, Вз и Сз. При этом ползун 11 опускается на вели- .чину Н-Нв Н-.
Далее шарнир.., В (фиг. 2 и 3) перемещаемся вправо-вверх, что соответствует 30 дополнительному перемеш.ению ползуна 11 вверх. Шарниры А, В и С занимают положения А4, В4 и С.
Из положения В шарнир перемещается в положение BI, т. е. вправо-вниз, а ползун 11 - движется при этом в крайнее ползу- 35 нижнее положение (фиг, 2).
Упомянутым соотнощениям соответствует область
20
40
(о:7-0,85) и ф, 200...250°.
где фв-угол поворота кривошипов, соответствующий ходу Не ползуна П. На фиг. 3 угол ф - угол поворота кривошипов, а точками 1-4 обозначены различные положения ползуна П.
0,
-Не
и
где Не - ход ползуна 11, во время которого производятся вспомогательные операции, то есть работа средств механизации и автоматизации;
И- полный ход ползуна 1.1. Упомянутые условия выполняются в области. R Н
tl. , R,
.
5 - Ri +(Uу R, f Е,-
причем H/RI:-:. 2/а0
(о:7-0,85) и ф, 200...250°.
где фв-угол поворота кривошипов, соответствующий ходу Не ползуна П. На фиг. 3 угол ф - угол поворота кривошипов, а точками 1-4 обозначены различные положения ползуна П.
5 Работа пресса с использованием исполнительного механизма по изобретению позволяет увеличить время для выполнения вспомогательных операций, не выключая пресс, т. е. не расходуя дополнительную электроэнергию на работу системы муфта-тормоз.
0 Технико-экономический эффект от внедрения изобретения обеспечивается уменьшением энергозатрат и увеличением КПД пресса ПС .сравнению с базовым объектом.
Формула изобретения
Исполнительный механизм кривошипного пресса, содержащий размещенные в опорах станины и связанные зубчатой передачей с передаточным отношением, равным единице, два кривошипных вала, а также шарнирно сочлененные друг с другом три шатуна, из ,которых один ш рнирно сом-- ленен с ползуном, а другие - с кривошипными валами при этом опоры одного из кривошипных валов размещены в плоскости расположения ползуна, отличающийся тем, что, с целью уменьшения энергозатрат и увеличения КПД пресса, параметры исполнительного механизма определяются соотношениями
3...11;
з..;п;
..-4;
-Ь
1,5...8;
0
5
х 1.-.
,4-li- R. ;
где RI - радиус кривошипа мерного крипо- нгипного вала;
R - радиус кривошипа второго кривошипного вала;
|| - длина шатуна, соединенного с кривошипом первого кривошипного вала:
2 - длина шатуна, соединенного с кри: Вошипом второго кривошипного вала;
1з - длина шатуна, соединенного с ползуном;
,- расстояние между опорами кривошипных валов в плоскости, перпендикулярной плоскости расположения ползуна;
{/-расстояние между опорами кривошипных валов в плоскости расположения ползуна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
| КРИВОШИПНО-ВИНТОВОЙ ПРЕСС | 2003 |
|
RU2252872C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| ДВУХВАЛЬНЫЙ УНИВЕРСАЛЬНЫЙ КРИВОШИПНО-КОРОМЫСЛО-ШАТУННЫЙ МЕХАНИЗМ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ НА ЕГО ОСНОВЕ | 2004 |
|
RU2275519C1 |
| ШТАМПОВОЧНЫЙ ПРЕСС | 2003 |
|
RU2238846C1 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| Механизм привода каретки плосковязальной машины | 1990 |
|
SU1730266A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Устройство для уравновешивания ползуна кривошипного пресса | 1984 |
|
SU1197869A1 |
Изобретение относится к кузнечно-прессовому машиностроению ,в частности, к конструкции кривошипных прессов. Цель - уменьшения энергозатрат и увеличение КПД пресса. Параметры исполнительного механизма определяются соотношениями: R2/R1=1...4
L1/R1 = 3 ... 11
L2/R1 = 3 ... 11
L3/R1 =1,5 ... 8
X = L2
Y=R1+L1-R2, где R1 - радиус кривошипа первого кривошипного вала
R2 - радиус кривошипа второго кривошипного вала
L1 - длина шатуна, соединенного с кривошипом первого кривошипного вала
L2 - длина шатуна, соединенного с кривошипом второго кривошипного вала
L3 - длина шатуна, соединенного с ползуном
Х - расстояние между опорами 1 и 2 в плоскости, перпендикулярной плоскости расположения ползуна 11
У - расстояние между опорами 1 и 2 в плоскости расположения ползуна 11. Механизм обеспечивает возможность работы пресса с использованием средств механизации без остановки, то есть не затрачивая энергии на включение и выключение системы муфта - тормоз. 5 ил.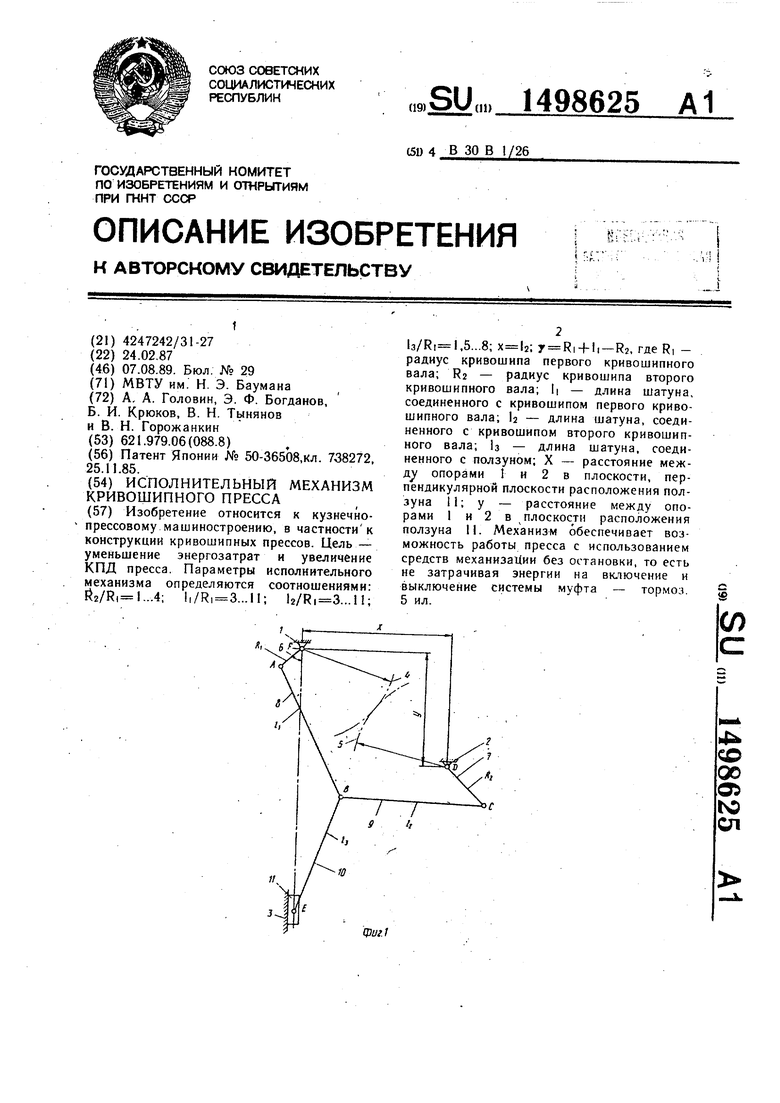
Л
5
27
X
10
f -Л
X-i 4
/ ///.j
Сг
Фиг.
П
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| 738272, 25.11.85. | |||
