Изобретение относится к средствам автоматизации технологических процессов в горнодобывающей промышленности.
Известно устройство для управления рОт торным экскаватором путем изменения скорости привода роторной стрелы при стабилизации его производительности, включающее задатчик производительности, задатчик нагрузки, датчик производитьности экскаватора, датчик нагрузки привода ротора, элемент сглаживания сигнала нагрузки в виде резистивно-емкостного фильтра, элемент сравнения, выход которого связан с входом регулятора, а один из входов через фильтр- с датчиком нагрузки, а также узел коррекции, один из входов которого связан с задатчиком производительности, второй - с датчиком производительности, третий - с задатчиком нагрузки, а выход - с вторым входом элемента сравнения 1.
НедостаткамиЭТОГО устройства являются некачественная фильтрация низкочастотных колебаний в цепи сигнала нагрузки и большая постоянная времени -резистивно-емкостного фильтра, что значительно ухудшает как статическую, так и динамическую точность регулирования.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство автоматического управления роторным экскаватором, содержащее блок управления приводами, регулятор производительности, элемент сравнения, блок вычитания, два блока умножения, узел коррекции, элемент сглаживания сигнала, задатчик и датчик производительности, датчик скорости привода ротора, датчик скорости конвейера, преобразователь синуса угла поворота и датчик нагрузки, выход которого подключен к первому в.оду блока вычитания, к первому входу элемента сглаживания сигнала и к первому входу узла коррекции, первый выход которого соединен с первым входом первого блока умножения, выход которого подключен к первому входу второго блока умножения, выход которого соединен с вторым вхо. дом блока вычитания, выход датчика ско-. рости привода ротора соединен с вторым входом узла коррекции и с вторым входом элемента сглаживания сигнала, выход которого подключен к второму входу первого блока умножения, выходы задатчика и датчика производительности экскаватора, а также датчика скорости конвейера подключены соответственно к третьему, четвертому и пятому входам узла коррекции, выход преобразователя синуса угла поворота соединен с вторым входом второго блока умножения, а выход элемента сравнения - с входом регулятора производительности, причем датчики производительности, нагрузки, скорости привода ротора, скорости конвейера, а также преобразователь синуса поворота
подключены соответственно к первому, второму, третьему, четвертому и пятому выходам блока управления приводами 2.
Недостатком данного устройства является низкое быстродействие системы при отработке больших сигналов рассогласования, вызванное низкой скоростью работы регулятора, повысить которую невозможно без нарущения устойчивости системы.
Целью изобретения является повышение
«
быстродействия и динамической точности
регулирования.
Поставленная цель достигается тем, что устройство автоматического управления роторным экскаватором, содержащее блок
5 управления приводами, регулятор производительности, элемент сравнения, блок вычитания, два блока умножения, узел коррекции, элемент сглаживания сигнала, задатчик и датчик производительности, датчик
д скорости привода ротора, датчик скорости конвейера, преобразователь синуса угла поворота и датчик нагрузки, выход которого подключен к первым входам блока вычитания, элемента сглаживания сигнала и узла коррекции, первый выход последнего сое5 динен с первым входом первого блока умножения, выход которого подключен к первому входу второго блока умножения, выход которого соединен с вторым входом блока вычитания, выход датчика скорости привода ротора соединен с вторым входом узла коррекции и с вторым входом элемента сглаживания сигнала, выход которого подключен к второму входу первого блока умножения, выход задатчика и датчика производительности, а также датчика скорости конвейера подключены соответственно к третьему, четвертому и пятому входам узла коррекции, выход преобразователя синуса угла поворота соединен с вторым входом второго блока умножения, а выход элемента сравнения - с входом регулятора производитель0 ности, причем датчики производительности, нагрузки, скорости привода ротора, скорости конвейера и также преобразователь синуса угла поворота подключены соответственно к первому, второму, третьему, четвертому и пятому выходам блока управления приводами экскаватора, снабжено задатчиком интенсивности, компаратором, датчиком скорости поворота стрелы и тремя управляемыми ключами, причем шестой выход блока управления приводами подключен к входу
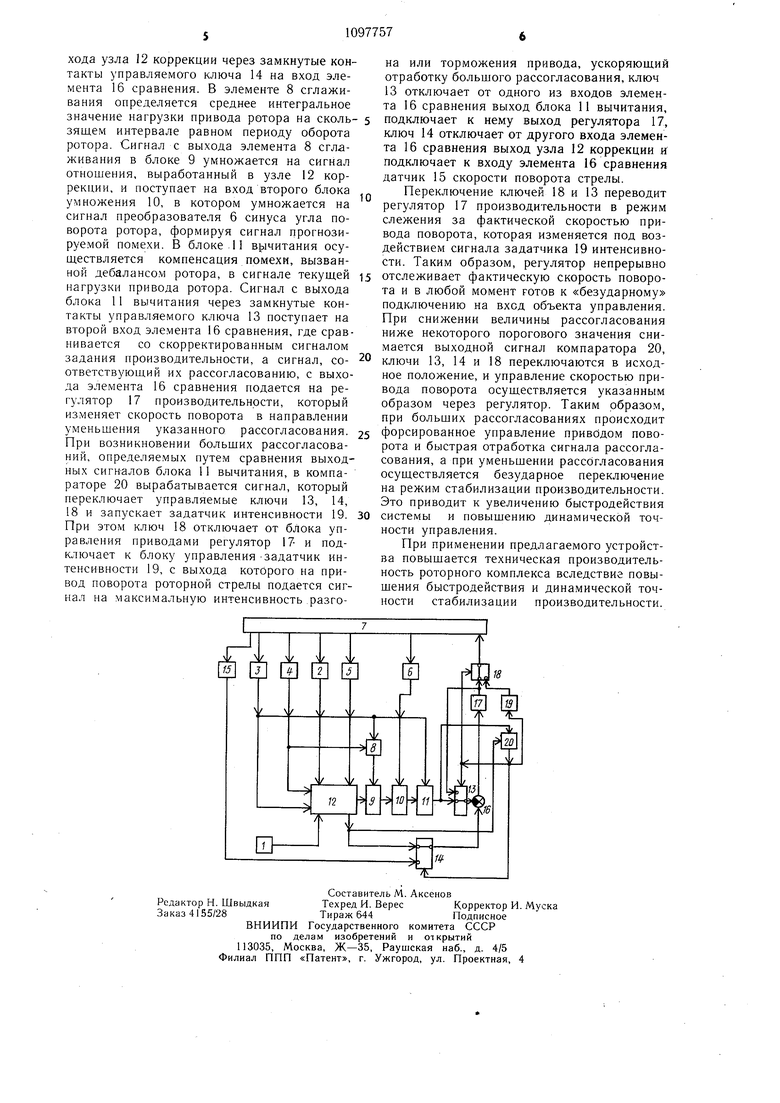
0 датчика скорости поворота стрелы, выход которого соединен с первым входом первого управляемого ключа, выход которого подключен к первому входу элемента сравнения, а второй выход узла коррекции подключен к второму входу первого управляе5 мого ключа и к первому входу компаратора, выход которого соединен с третьим входом первого управляемого ключа, с первыми входами второго и третьего управляемых ключей и с входом задатчика интенсивности, выход которого подключен к второму входу третьего управляемого ключа, выход которого подключен к входу блока управления приводами, при этом выход блока вычитаНИН соединен с вторым входом второго управляемого ключа, выход которого подключен к второму входу элемента сравнения, а выход регулятора производительности подключен к третьим входам второго и третьего управляемых ключей. На чертеже представлена функциональная схема устройства. Устройство содержит задатчик 1 производительности, датчик 2 производительности экскаватора, датчик 3 нагрузки, датчик 4 скорости привода ротора, датчик 5 скорости конвейера, преобразователь 6 синуса угла поворота, блок 7 управления приводами, элемент 8 сглаживания сигнала, первый 9 и второй 10 блоки умножения, блок вычитания 11, узел 12 коррекции, второй управляемый ключ 13, первый управляемый ключ 14, датчик 15 скорости поворота роторной стрелы, элемент сравнения 16, регулятор 17 производительности, третий управляемый ключ 18, задатчик интенсивности 19 и компаратор 20. Введение задатчика интенсивности 19, вход запуска которого связан с выходом компаратора 20, обеспечивает формирование сигнала большой интенсивности на разгон или торможение привода поворота роторной стрелы при возникновении больших рассогласований между заданным и фактическим значениями регулируемой величины. Введение компаратора 20 обеспечивает формирование сигнала на переключение управляемых ключей и запуск задатчика интенсивности 19 при возникновении больших рассогласований, что приводит к отключению выхода регулятора 17 от блока управле ния приводами и переводу его в режим слежения за текушим значением скорости привода поворота, а также подключение к блоку управления приводами задатчика интенсивности 19. Введение управляемого ключа 18 обеспечивает подключение к блоку управления приводамивыхода задатчика интенсивности 19 и отключение от блока управления приводами выхода регулятора при возникновении больших рассогласований, а также обратное переключение при входе в зону малых рассогласований. Введение управляемого ключа 13 обеспечивает переключение регулятора 17 производительности в режим слежения со значением текущей скорости привода поворота при возникновении больших рассогласований с тем, чтобы в момент обратного перехода в режим малых рассогласований обеспечить соответствие сигнала управления на выходе регулятора 17 производительности фактическому значению скорости и тем самым уменьшить динамическую ошибку системы. Введение управляемого ключа 14 обеспечивает при возникновении больших рассогласований подключение на вход регулятора 17 производительности сигнала, пропорционального скорости привода поворота роторной стрелы и отключение сигнала узла коррекции 12 от этого входа, а также обратное переключение при входе в зону малых рассогласований. Введение датчика 15 скорости поворота стрелы обеспечивает формирование сигнала, пропорционального скорости привода поворота для подачи его на вход регулятора 17 производительности при больших рассогласованиях, благодаря чему обеспечивается слежение за скоростью поворота и согласование сигналов управления приводом поворота в момент перехода от больших рассогласований к малым. Таким образом, введение задатчика интенсивности, компаратора, датчика скорости привода поворота роторной стрелы, трех управляемых ключей с соответствующими связями обеспечивает форсированный разгон или торможение привода поворота при возникновении больших рассогласований между заданным и фактическим значениями регулируемой величины, а также плавный, безударный переход в режим нормального регулирования после отработки больших рассогласований и переходе к малым. Благодаря этому достигается существенное повышение быстродействия системы управления, что приводит в конечном счете к уменьшению динамической ошибки стабилизации. Устройство работает следующим образом. При возникновении малых рассогласований контакты управляемых ключей 13, 14 и 18 находятся в положениях, показанных сплошными линиями, и работа предлагаемого устройства, не отличается от работы устройства по прототипу, т. е. от датчика 3 нагрузки привода ротора сигнал поступает на входы узла 12 коррекции, элемента 8 сглаживания и блока И вычитания. Одновременно на управляющие входы узла 12 коррекции поступают сигналы датчика 4 скорости привода ротора и датчика 5 скорости конвейера, а также сигналы датчика 2 и задатчика I производительности экскаватора. В узле 12 коррекции осуществляется задержка сигнала датчика 3 нагрузки привода ротора на время транспортного запаздывания сигнала датчика 2 производительности, определяются средние интегральные значения на скользящем интервале равном периоду оборота ротора, сигналов датчика 3 нагрузки привода ротора и датчика 2 производительности, а также вычисляется отношение этих сигналов и производится умножение сигнала отношения на сигнал задатчика 1 производительности. Полученный таким образом сигнал скорректированного задания производительности подается с вы

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство для автоматического управления роторным экскаватором | 1984 |
|
SU1221280A2 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство автоматического управления роторным экскаватором | 1988 |
|
SU1567726A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЬШ ЭКСКАВАТОРОМ, содержащее блок управления приводами, регулятор производительности, элемент сравнения, блок вычитания, два блока умножения, узел коррекции, элемент сглаживания сигнала, задатчик и датчик производительности, датчик скорости привода ротора, датчик скорости конвейера, преобразователь синуса угла поворота и датчик нагрузки, выход которого подключен к первым входам блока вычитания, элемента сглаживания сигнала и узла коррекции, первый выход последнего соединен с первым входом первого блока умножения, выход которого подключен к первому входу второго блока умножения, выход которого соединен с вторым входом блока вычитания, выход датчика скорости привода ротора соединен с вторым входом узла коррекции и с вторым входом элемента сглаживания сигнала, выход которого подключен к второму входу nfepBoro блока умножения, выход задатчика и датчика производительности, а также датчика скорости конвейера подключены соответственно к третьему, четвертому и пятому входам узла коррек ции, выход преобразователя синуса угла поворота соединен с вторым входом второго блока умножения, а выход элемента сравнения с входом регулятора производительности, причем датчики производительности, нагрузки, скорости привода ротора, скорости конвейера, а также преобразователь синуса угла поворота подключены соответственно к первому, второму, третьему, четвертому и пятому выходам блока управления приводами, отличающееся тем, что, с целью повышения быстродействия устройства, оно снабжено задатчиком интенсивности, компаратором, датчиком скорости поворота стрелы и трения управляемыми ключами, причем шестой выход блока управления прис S водами подключен к входу датчика скорости поворота стрелы, выход которого сое(Л динен с первым входом первого управляемого ключа, выход которого подключен к первому входу элемента сравнения, а второй выход узла коррекции подключен к второму входу первого управляемого ключа и к первому входу компаратора, выход которого соединен с третьим входом первого управляемого ключа, с первыми входами со ел второго и третьего управляемых ключей и с входом задатчика интенсивности, выход которого подключен к второму входу третьего управляемого ключа, выход которого подключен к входу блока управления приводами, при этом выход блока вычитания соединен с вторым входом второго управляемого ключа, выход которого подключен к второму входу элемента сравнения, а выход регулятора производительности подключен к третьим входам второго и третьего управляемых ключей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 0 |
|
SU302444A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
