« П
4: 4:
ОО
3 1
Изобретение относится к радиотех- частности к веньерно-ткальнике,
ным устройствам с тросиковьтм приводом указателя шкалы радиоприемника,
Цель изобретения - повышение точности регулировки и упрощение сборки.
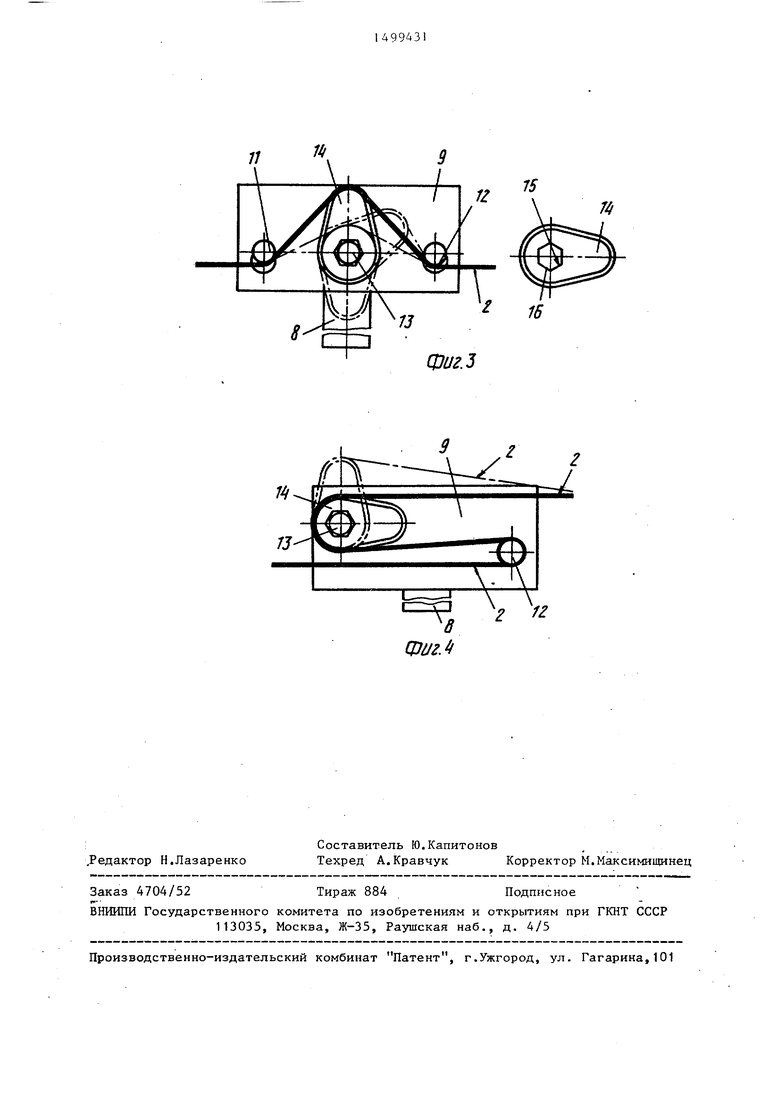
На фиг, 1 изображена кинематическая схема верньерного устройства; на фиг, 2 - ползун и кулачок, вид сбоку; на фиг. 3 - то же, вид в плане; на фиг, 4 - схема размещения кулачка на ползуне, вид в плане.
Верньерное устройство содержит шасси 1, установленные на нем гибкую передачу, включающую гибкую нить 2, соединенную с ней пружину 3 натяжения, направлянщие ролики 4, ручку 5 настройки, замедляюпщй барабан 6, установленньп на оси элемента 7 настройки, а также указатель 8 настройки, установленный посредством ползуна 9 на направлягацей 10,
Ползун 9 снабжен выступами 11-13 (фиг, 1 и 2), при этом на выступе 13 установлен поворотный кулачок 14, на которьш запасована гибкая нить 2, Для исключения произвольного поворо .та. кулачка 14 выступ 13 вьшолнен фит- -
гурным в виде правильного многогранника, а кулачок 14 снабжен фигурным отверстием 15, форма которого повторяет форму выступа 13 и имеет ко же граней 16 (фиг, 3).
Устройство работает следующим образом.
Регулировка оптимального начального натяжения гибкой нити 2 в предложенном верньерном устройстве осу- ществляэтся поворотом кулачка 14 относительно выступа 13 на некоторьй
5 0
5
0
0
5
1 .4
фиксированный угол (фиг. 3), Кулачок 14 может быть снят.с фигурного выступа 13 и вновь установлен на него в нескольких фиксированных угловых положениях, количество которых определяется количеством граней 16 выступа 13 и отверстия 15 кулачка 14, Гибкая нить 2 запасована на выступы 11 и 12 с охватом кулачка 14 (фиг, 3),
Поворот кулачка 14 изменяет длину запасованной между выступами 11 и 12 и кулачком 14 гибкой нити, что позволяет регулировать ее натяжение в ту или иную сторону. Соединенная с гибкой нитью 2 пружина 3 компенсирует остаточйую деформацию (вытяжение) гибкой нити 2 в процессе эксплуатации верньерного устройства.
Формула изобретения
Верньерное устройство, содержащее шасси, установленный на нем механизм настройки, включающий направляющие ролики, замедлятощий барабан, указатель настройки, выполненный в виде направляющей, установленного на ней с возможностью перемещения ползуна, и гибкую нить с пружиной натяжения, причем ползун выполнен с выступами, на которые запасована гибкая нить, отличающееся тем, что, с целью повышения точности регулировки и упрощения сборки, один из выстуйов ползуна выполнен в виде правильного многогранника с размещенным на нем съемным кулачком с установочным отверстием, соответствующим поперечному сечению выступа ползуна, а гибкая нить запасована с охватом кулачка..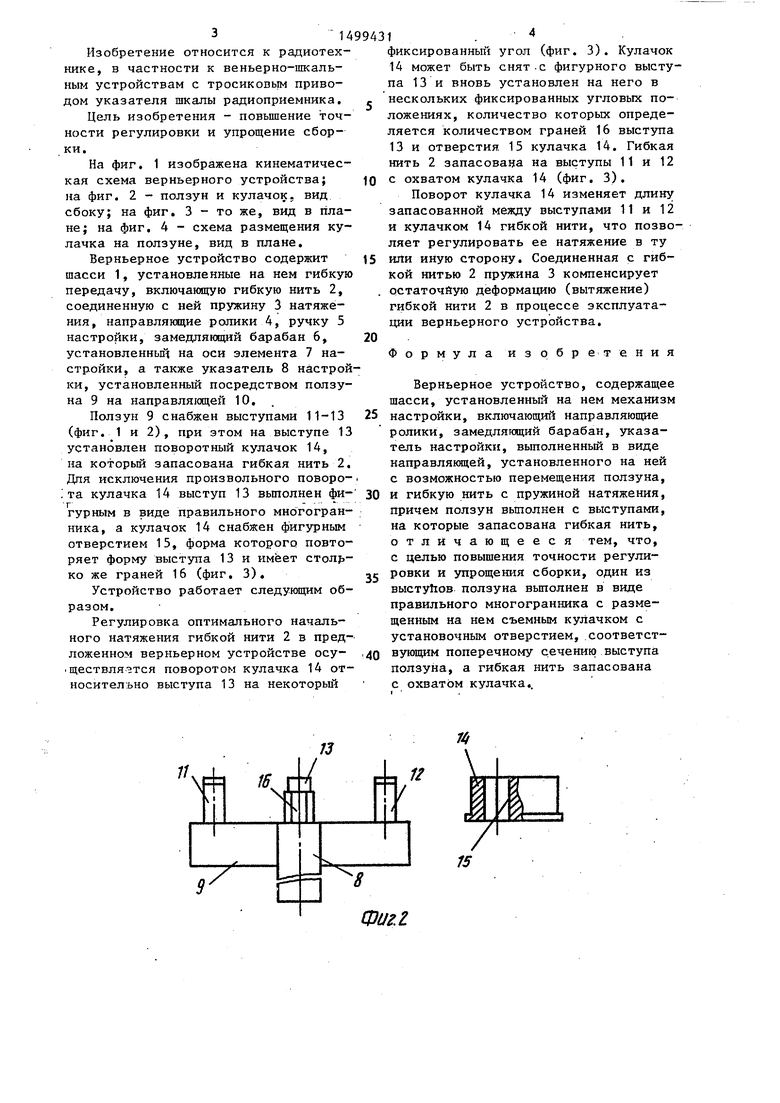
| название | год | авторы | номер документа |
|---|---|---|---|
| Верньерное устройство | 1984 |
|
SU1279055A1 |
| Верньерное шкальное устройство | 1973 |
|
SU512563A1 |
| Машина для прививки виноградной лозы | 1957 |
|
SU121991A1 |
| Устройство для пневматического соединения текстильных нитей на автоматической мотальной машине | 1982 |
|
SU1250166A3 |
| Устройство для регулирования натяжения гибкого элемента | 1975 |
|
SU553202A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Полуавтомат для обработки роторов микроэлектродвигателей | 1960 |
|
SU140906A1 |
| Веретено для плетельной машины | 1980 |
|
SU953035A1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ РАБОЧИХ ЩЕЛЕЙ ВЕРТИКАЛЬНО-ШПИНДЕЛЬНЫХ ХЛОПКОУБОРОЧНЫХАППАРАТОВ | 1968 |
|
SU231942A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
Изобретение относится к радиотехнике ,в частности, к конструкции радиоприемных устройств с тросиковым приводом указателя шкалы. Цель изобретения - повышение точности регулировки и упрощение сборки. Поставленная цель достигается за счет того, что устройство содержит установленные на шасси 1 механизм настройки, включающий направляющие ролики 4, замедляющий барабан 6, указатель 8 настройки с ползуном 9 и направляющей 10, гибкую нить 2 с пружиной 3 натяжения. Ползун 9 выполнен с выступами 11-13. На выступ 13, выполненный в виде правильного многоугольника, надет кулачок 14, установочное отверстие которого повторяет форму выступа 13. Регулировка натяжения гибкой нити 2 осуществляется путем перестановки кулачка 14 относительно выступа 13 на некоторый фиксированный угол с последующим закреплением кулачка 14 на выступе 13. 4 ил.
7J
74
7li
16
фиг.З
Фиг.
