/г 17
Л
ел
4
00
Фие.1
состоит из тягового средства 1 с передним 2 и задним 3 навесными устройствами, соединенного через вал отбора мощности 4 и заднее навесное устройство 3 с технологическим модулем 5, при этом поворот тягового средства по отношению технологического модуля осуществляется вокруг соединительного шкворня 6. Новым является то, что в продольных тягах 8 переднего навесного устройства установлены датчики 9 тяговых усилий, а в соединительном шкворне 6 - датчики 10 и 11 угла поворота технологического модуля, причем датчики тяговых усилий и угла поворота электрически связаны через блок управления 12, включаю ций компаратор напряжения 13, четыре электромагнитных реле 14-17 с нормально разомкнутыми контактами, два электромагнитных реле 18 и 19 с нормально замкнутыми . контактами и логический блок, состо15041 8
ящий из днух инверторов, двух логических элементов И, а также лбгичес- кого элемента ИЛИ с двумя электро- с магнитами 26 и 27 трехпозиционного гидрораспределителя 28 и одним электромагнитом 29 днухпозиционного гидрораспределителя 30, при этом трех- позиционный гидрораспределитель сое- 10 динен с источником питания 31 и со сливом через двухпозиционный гидрораспределитель 30 с полостями двухштокового гидроцилиндра 32 двустороннего действия, причем один из штоков
15 шарнирно связан с технологическим модулем 5, а корпус гидроцилиндра 32 соединен с задним нанесным устройством 3 тягового средства, при этом электромагниты трехпоэиционно20 го гидрораспределителя связаны через блок управления 12 с датчиком 33 угла поворота управляемых колес, 1 3.п. ф-лы, 2 ил,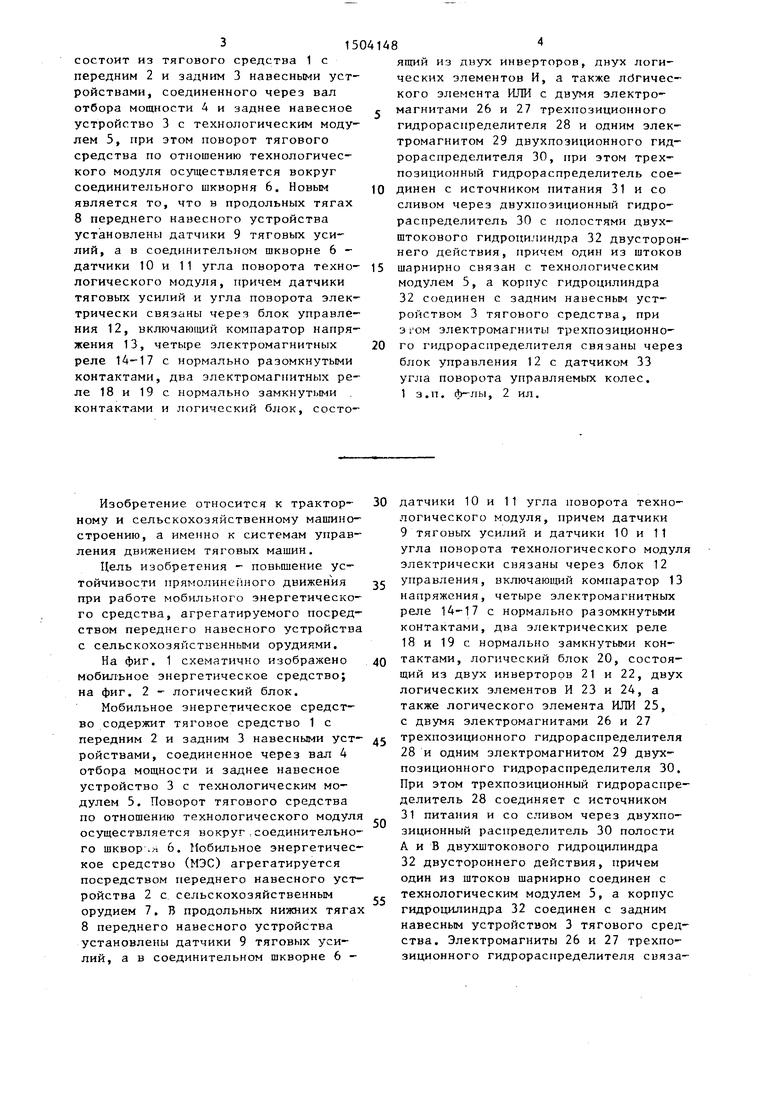

| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильное энергетическое средство | 1987 |
|
SU1418173A1 |
| Мобильное энергетическое средство | 1985 |
|
SU1258754A1 |
| Мобильное энергетическое средство | 1990 |
|
SU1710375A1 |
| Мобильное энергетическое средство | 1986 |
|
SU1414704A1 |
| Мобильное энергетическое средство | 1988 |
|
SU1527080A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
| Мобильное энергетическое средство | 1987 |
|
SU1416342A1 |
| Мобильное энергетическое средство | 1990 |
|
SU1708687A1 |
| УСТРОЙСТВО НАКЛОНА УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПОВОРОТЕ | 1999 |
|
RU2176204C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |

Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к системам управления движением тяговых машин. Цель изобретения - повышение устойчивости прямолинейного движения при работе мобильного энергетического средства, агрегатируемого посредством переднего навесного устройства с сельскохозяйственными орудиями. Мобильное энергетическое средство состоит из тягового средства 1 с передним 2 и задним 3 навесными устройствами, соединенного через вал отбора мощности 4 и заднее навесное устройство 3 с технологическим модулем 5, при этом поворот тягового средства по отношению технологического модуля осуществляется вокруг соединительного шкворня 6. Новым является то, что в продольных тягах 8 переднего навесного устройства установлены датчики 9 тяговых усилий, а в соединительном шкворне 6-датчики 10 и 11 угла поворота технологического модуля, причем датчики тяговых усилий и угла поворота электрически связаны через блок управления 12, включающий компаратор напряжения 13, четыре электромагнитных реле 14-17 с нормально разомкнутыми контактами, два электромагнитных реле 18 и 19 с нормально замкнутыми контактами и логический блок, состоящий из двух инверторов, двух логических элементов И, а также логического элемента ИЛИ с двумя электромагнитами 26 и 27 трехпозиционного гидрораспределителя 28 и одним электромагнитом 29 двухпозиционного гидрораспределителя 30, при этом трехпозиционный гидрораспределитель соединен с источником питания 31 и со сливом через двухпозиционный гидрораспределитель 30 с полостями двухштокового гидроцилиндра 32 двустороннего действия, причем один из штоков шарнирно связан с технологическим модулем 5, а корпус гидроцилиндра 32 соединен с задним навесным устройством 3 тягового средства, при этом электромагниты трехпозиционного гидрораспределителя связаны через блок управления 12 с датчиком 33 угла поворота управляемых колес. 1 з.п. ф-лы, 2 ил.
Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к системам управления движением тяговых машин.
Цель изобретения - повьш1ение устойчивости прямолинеГшого движения при работе мобильного энергетического средства, агрегатируемого посредством переднего навесного устройства с сельскохозяйственными орудиями.
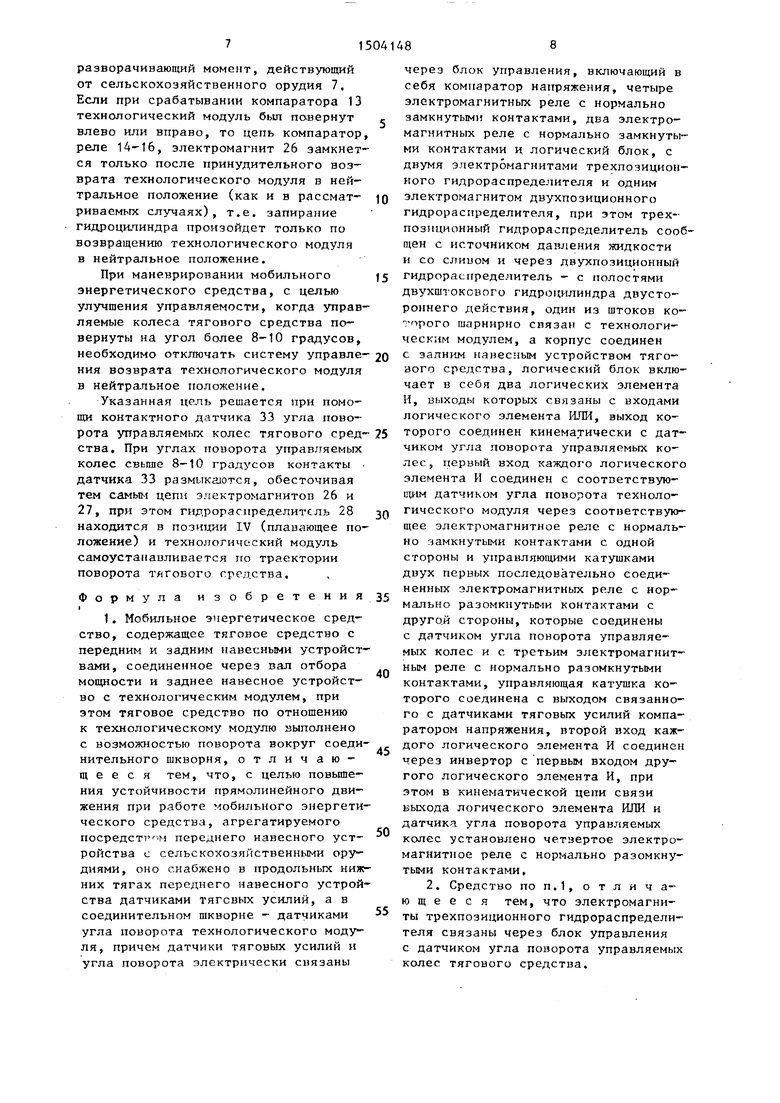
На фиг. 1 схематично изображено мобильное энергетическое средство; на фиг. 2 - логический блок.
Мобильное энергетическое средство содержит тяговое средство 1 с передним 2 и задним 3 навесными устройствами, соединенное через вал 4 отбора мощности и заднее навесное устройство 3 с технологическим модулем 5. Поворот тягового средства по отношению технологического модуля осуществляется вокруг .соединительного шкворчя 6. Мобильное энергетическое средство (МЭС) агрегатируется посредством переднего навесного устройства 2 с сельскохозяйственным орудием 7, В продольных нижних тягах 8 переднего навесного устройства установлены датчики 9 тяговых усилий, а в соединительном шкворне 6 -
0
5
0
5
0
5
датчики 10 и 11 угла поворота технологического модуля, причем датчики 9 тяговых усилий и датчики 10 и 11 угла поворота технологического модуля электрически связаны через блок 12 управления, включаюи ий компаратор 13 напряжения, четыре электромагнитных реле 14-17 с нормально разомкнутыми контактами, два электрических реле 18 и 19 с нормально замкнутыми контактами, логический блок 20, состоящий из двух инверторов 21 и 22, двух логических элементов И 23 и 24, а также логического элемента ИЛИ 25, с двумя электромагнитами 26 и 27 трехпозиционного гидрораспределителя 28 и одним электромагнитом 29 двух- позиционного гидрораспределителя 30. При этом трехпозиционный гидрораспределитель 28 соединяет с источником
31питания и со сливом через двухпозиционный распределитель 30 полости А и В двухштокового гидроцилиндра
32двустороннего действия, причем один из штоков шарнирно соединен с технологическим модулем 5, а корпус гидроцилиндра 32 соединен с задним навесным устройством 3 тягового средства. Электромагниты 26 и 27 трехпозиционного гидрораспределителя связа5
ны через блок 12 угтравления с датчиком 33 угла поворота управляемых колес.
Мобильное энергетическпе средство работает следующим образом.
При движении МЭС вследствие возникающего на сельскохозяйстиенном орудии 7 развора гавающего момента в продольных нижних тягах 8 переднего навесного устройства возникают усилия растяжения-сжатия, которые регистри- р тотся датчиками 9 тяговых усилий. Сигнал от последних подается на входы компаратора 13 напряжения, а с ei o выхода - на электромагнитное ре. - ле 14, Если разность входных сигналов меньше напряжения сраблтыгания компаратора 13 илп равна нулю, то на его выходе фордмируется сигнал
1, при этом электромагнитное реле 14 не срабатывает, его контакты ра- чомкнуты. Если при этом технологический модуль не повернут относительно соединительного шкворня 6, то датчики Юн 11 угла поворота разомкнуты, реле 18 и 19 обесточены, а их контакты замкнуты, вызвав сраоатыьа- нио реле 15 и 16 и закрыв выход ло- /ического блока 20, Отсутствие сигнала на выходе логического блока 20 приводит к отсутствию тока у катушке Р лпе 17 и цепь электромагнугта 27 будет обесточена даже при чамкиугых контактах датчика yпpaвляe ыx колес (при угле поворота до 8-10 градусов) Электромагнит 26 также будет обесточен из-за несрабатывания реле 14, Электромагнит 29 днухпозиционного Тидрораспределителя 30 будет включен через нормально замкнуты : контакты реле 19, При этом тpexпoзици J :ный гидрораспределитель будет находиться в позиции IV, а двухпозиционный - в позиции II, Полости гидроцилиндра 32 будут соединены между собой и технологический модуль может поворачиваться относительно Ш1сворня 6 на определенный угол, равный зоне нечувствительности датчиков 10 и 11. Если по чаки м-то причинам угол поворота технологического модуля окажется больше зоны нечувствительности, то замкнется один из датчиков 10 или 11 При этом- сработает соответственно pe;ie 19 или 18, вызвав размыкание контактов, что приводит к отключению реле 15 или 16, Появившийся на входе логического блока 20 один из сигна041486
лов от датчиков 10 или 11 вызывает его срабатывание и замыкание контактов реле 17 и включение электромагни- f. та 27. Гидрораспределитсль 28 занимает позицию III, При этом, если поворот технологического модуля произошел вправо, то сработавший датчик 10 через реле 19 вызывает обес10 точивание электромагнита 29, гидро- распределитель 30 занимает позицию I и масло от насоса поступает в полость А гидроцилиндра 32, Полость В соединена со сливом. Происходит при15 нудительный возврат технологического модуля в-нейтральное положение до тех пор, пока не разомкнутся контак- ть датчика 10 и гидрораспределитель 28 не вернется н позицию IV. Если же
20 поворот технологического модуля произошел влево, то замкнут датчик 11, который вызывает также срабатывание электромагнита реле 18, размыкание его контактов,включение логическо-
25 го блока 20 (так как есть сигнал от реле 19), включение электромагнита 27, От реле 19 находится под током электромагнит 29, При этом гидрорас- пределитсль 28 занимает позицию III,
а гидрораспределитель 30 - позицию II. Масло or насоса поступает в полость В, вызывая поворот технологического модуля к нейтральному положению. Полость А соединена при этом
,г со сливом. При возврате технологического модуля в нейтральное положение датчик 11 размыкается, логический блок 20 закрывается, обесточивая электромагнит 27, Гидрораспределитель
0 29 занимает позицию IV.
Если разность входных сигналов компаратора прень шает напряжение срабатывания, то на его выходе формируется сигнал О, реле 14 замыка5 ет контакты. Если при этом угол поворота технологического модуля находится в пределах зоны нечувствительности датчиков 10 и 11, то через цепь контактов реле 14-16 датчика Q 33 поворота уиравляемых колес запиты- вается электромагнит 26 и трехпози- ционный гидрораспределитель 28 займет позицию V, заперев полости гидроцилиндра. В результате гидроцилиндр
g 32 предотвраьчает складывание тягового средства 1 относительно технологического модуля 5, сохраняя тем самым прямолинейность движения мобильного энергетического средства несмотря на
разворачивающий момент, действующий от сельскохозяйственного орудия 7. Если при срабатывании компаратора 13 технологический модуль бьт павернут влево или вправо, то цепь компаратор, реле 14-16, электромагнит 26 замкнется только после принудительного возврата технологического модуля в нейтральное положение (как и в рассматриваемых случаях), т.е. запирание гидроцилиндра произойдет только по возвращению технологического модуля в нейтральное положение.
При маневрировании мобильного энергетического средства, с целью улучшения управляемости, когда управляемые колеса тягового средства повернуты на угол более 8-10 градусов, необходимо отключать систему управления возврата технологического модуля в нейтрапьное положение.
Указанная це-пь решается при помощи контактного датчика 33 угла поворота управляемых колес тягового средства. При углах поворота управляемых колес свыше 8-10 градусов контакты датчика 33 размыкаются, обесточивая тем самым цепи электромагнитов 26 и 27, при этом гидрораспределитель 28 находится в позиции IV (плавающее положение) и технологический модуль самоустанавливается по траектории поворота тягового средства.
Формула изобретения (
5
0
5
0
5
0
5
0
5
через блок управления, включающий в себя компаратор напряжения, четыре электромагнитных реле с нормально замкнутыми контактами, два электромагнитных реле с нормально замкнутыми контактами и логический блок, с двумя электромагнитами трехпозицион- ного гидрораспределителя и одним электромагнитом двухпозиционного гидрораспределителя, при этом трех- позиционный гидрораспределитель сообщен с источником давления жидкости и со сливом и через двухпозиционный гидрораспределитель - с полостями двухштокового гидроцилиндра двустороннего действия, один из штоков которого шарнирно связан с технологическим модулем, а корпус соединен с задним навесным устройством тягового средства, логический блок включает в себя два логических элемента И, выходы которых связаны с входами логического элемента ИЛИ, выход которого соединен кинематически с датчиком угла поворота управляемых колес, первый вход каждого логического элемента И соединен с соотпетствую- up-iM датчиком угла поворота технологического модуля через соответствующее электромагнитное реле с нормально замкнутыми контактами с одной стороны и управляющими катушками двух первых последовательно соединенных электромагнитных реле с нормально разомкнутыми контактами с друго.й стороны, которые соединены с датчиком угла поворота управляемых колес и с третьим электромагнитным реле с нормально разомкнутыми контактами, управляющая катушка которого соединена с выходом связанного с датчиками тяговых усилий компаратором напряжения, второй вход каждого логического элемента И соединен через инвертор с первым входом другого логического элемента И, при этом в кинематической цепи связи выхода логического элемента ИЛИ и датчика угла поворота управляемых колес установлено четвертое электромагнитное реле с нормально разомкнутыми контактами,
| Мобильное энергетическое средство | 1985 |
|
SU1258754A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
