(Л
сд
о
4ib 4
00
сд
Изобретение относится к машиностроению, а именно к кулачковым преобразователям движения, и может найти применение, в частности, в поршневых ма1пинах.
Цель изобретения - расширение кинематических возможностей механизма за счет увеличения числа ходов ползунов за один оборот кулачка.
На чертеже показана конструктивная схема механизма.
Механизм содержит корпус 1 с направляющими 2 и 3, ведущий вал 4, ось вращения которого параллельна направляющим 2, 3 и расположена с ним в одной плоскости, установленные в направляющих 2 и 3 ползуны 5 и 6 с выполненными в них сквозными диаметральными пазами 7 и закрепленный на валу 4 торцовой кулачок 8, рабочая поверхность которого образована равнобедренными треугольниками 9, расположенными симметрично по окружности кулачка. Стороиы треугольников сопряжены окружностями одного радиуса.
В корпусе 1 установлен симметричный двуплечий рычаг 10, ось вращения которого пересечена с осью вращения ведущего вала 4. На рычаге 10 установлены две пары роликов 11 и 12. Ролики 11 выполнены сферическими с радиусом сферы, меньщим или равным радиусу окружностей, сопрягающих стороны треугольников 9 кулачка 8, и взаимодействуют с кулачком 8, а ролики 12 взаимодействуют с пазами 7 ползунов 5 и 6.
Количество треугольников 9 на кулачке 8 может быть один, три, пять и т. д. Максимальное их количество зависит от диаметра кулачка 8 и определяется условием угла при верщине треугольника, при котором отсутствует самоторможение роликов 11 на рычаге 10.
Механизм работает следующим образом.
При вращении вала 4 от привода (не показан) кулачок 8 своей рабочей поверх- ностью обкатывается по роликам 11 рычага
0
5
,.
5
0
5
10, в результате чего рычагу 10 сообщается колебательное движение вокруг своей оси. Ролики 12 при этом воздействуют на стенки пазов 7 и сообщают ползунам 5 и 6 разнонаправленное возвратно-поступательное движение. Число двойных ходов ползунов 5 и 6 за один оборот вала 4 соответствует числу треугольников 9 на кулачке 8.
Формула изобретения
Кулачковый пространственный механизм для преобразования вращательного движения в возвратно-поступательное и наоборот, содержащий корпус с двумя параллельными прямолинейными направляющими, ведущий вад, ось вращения которого параллельна направляющим и расположена в одной с ними плоскости, установленные в направляющих два ползуна с выполненными в них пазами и закрепленный на ведущем валу торцовый кулачок, кинематически связанный с пазами ползунов, отличающийся тем, что, с целью расщирения кинематических возмож ностей, рабочая поверхность кулачка образована расположенными равномерно по окружности равнобедренными треугольниками, стороны которых сопряжены окружностями, пазы в ползунах выполнены сквозными диаметральными, а кинематическая связь кулачка с пазами ползунов выполнена в виде установленного в корпусе симметричного двуплечего рычага, ось вращения которого пересечена с осью вращения ведущего вала, и установленных на рычаге двух пар роликов, первая пара которых предназначена для взаимодействия с рабочей поверхностью кулачка, а вторая пара - для взаимодействия с соответствующими пазами ползунов, при этом наружная поверхность первой пары роликов выполиена сферической, а ее радиус меньше или равен радиусу окружностей, сопрягающих стороны треугольников кулачка.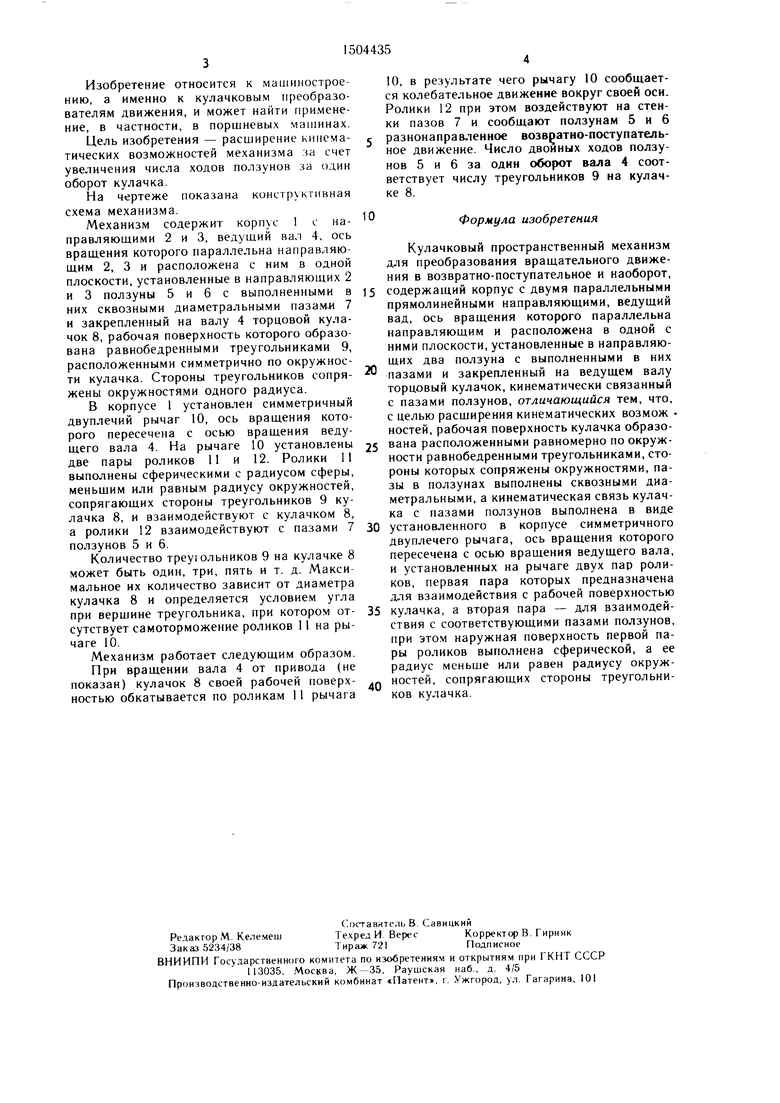
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулачковый пространственный механизм для преобразования вращательного движения в возвратно-поступательное и наоборот | 1988 |
|
SU1587283A1 |
| ВАРИАТОР | 2018 |
|
RU2678179C1 |
| ВАРИАТОР | 2018 |
|
RU2762220C1 |
| Кулачково-кулисный механизм с остановками | 1988 |
|
SU1523799A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Транспортный ротор | 1988 |
|
SU1553460A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Способ обработки резанием циклоидальных поверхностей | 1985 |
|
SU1337202A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
Изобретение относится к кулачковым преобразователям движения и может найти применение , в частности, в поршневых машинах. Цель изобретения - расширение кинематических возможностей механизма за счет увеличения числа ходов ползунов за один оборот кулачка. При вращении кулачка 8 последний обкатывается по роликам 11 рычага 10, который совершает колебательное движение вокруг своей оси. Ролики 12 при этом воздействуют на стенки пазов 7 и сообщают ползунам 5 и 6 возвратно-поступательное движение. 1 ил.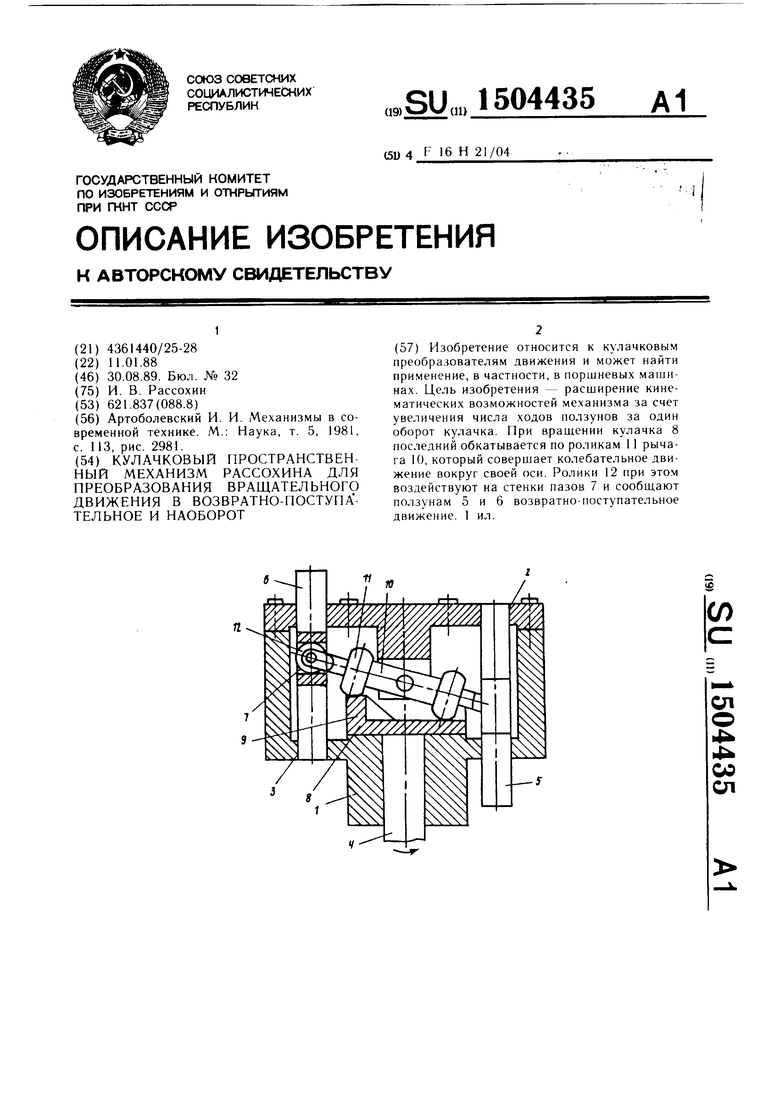
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| М.: Наука, т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Двуствольное охотничье ружье | 1925 |
|
SU2981A1 |
