ется, при этом останавливается и соответствующий камень 17 или 18 ведомой кулисы 12 или 15. В силу этого останавливаются и валы 11 или 14, с которыми жестко связаны
кулисы 12 и 15, За два оборота ведущего вала А ведомые валы М и 14 совершают один оборот, имея поочередные остановки через каждые 120°. 2 3, п, ф-лы, 8 ил. 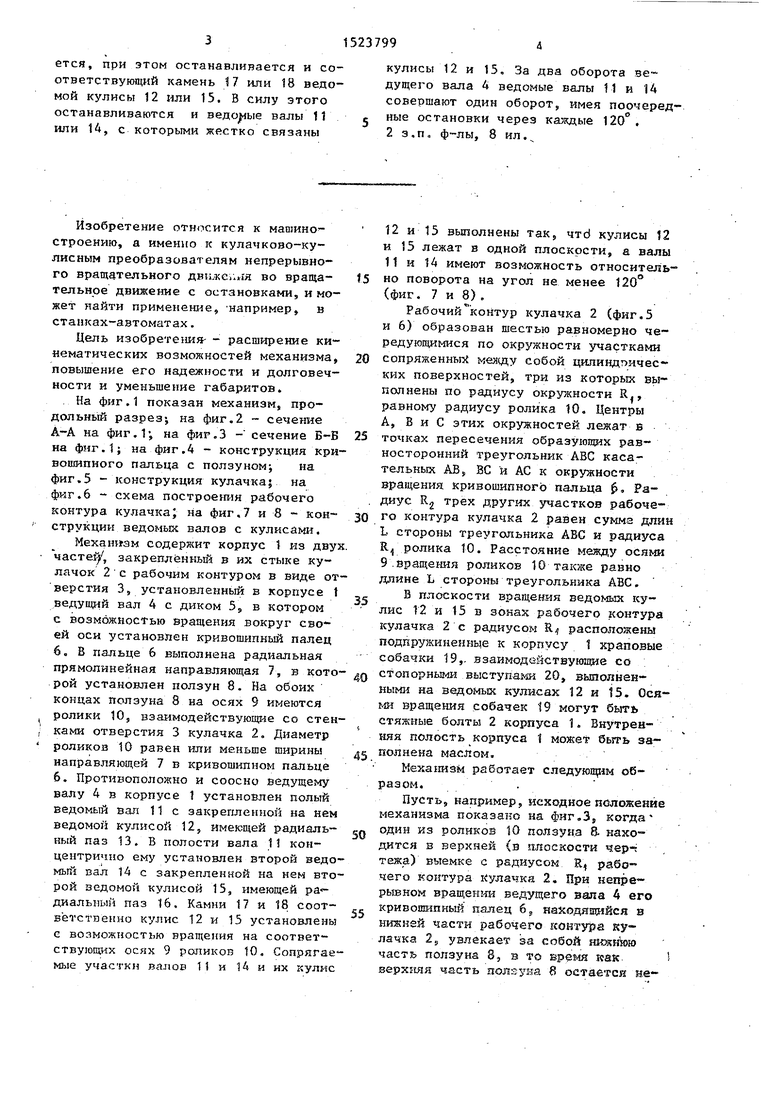
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный насос | 1988 |
|
SU1681050A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Устройство для подачи материала к обрабатывающей машине | 1983 |
|
SU1091976A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Устройство для установки клиньев в пазы якорей электрических машин | 1980 |
|
SU920969A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
Изобретение относится к кулачково-кулисным преобразователям непрерывного вращательного движения во вращательное движение с остановками и найдет применение, например, в станках - автоматах. Цель изобретения - расширение кинематических возможностей механизма, повышение его надежности и долговечности и уменьшение габаритов. При непрерывном вращении ведущего вала 4 ползун 8, взаимодействуя своими роликами 10 с кулачком 2, перемещается в радиальном направляющей кривошипного пальца 6. Когда один из роликов 10 попадает в выемку кулачка 2, радиус которой равен радиусу ролика, соответствующий конец ползуна 8 останавливается, при этом останавливается и соответствующий камень 17 или 18 ведомой кулисы 12 или 15. В силу этого останавливается и ведомые валы 11 или 14, с которыми жестко связаны кулисы 12 и 15. За два оборота ведущего вала 4 ведомые валы 11 и 14 совершают один оборот, имея поочередные остановки через каждые 120°. 2 з.п. ф-лы. 8 ил.
Изобретение относится к машинотроению, а именно к кулачково-ку- исным преобразователям непрерывного вращательного лкн-ке,1Я. во вращательное движение с остановками, и может иайти применение, например, в станках-автоматах.
Цепь изобретения- - расширение кинематических возможностей механизма, повышение его надежности и долговечности и уменьшение габаритов.
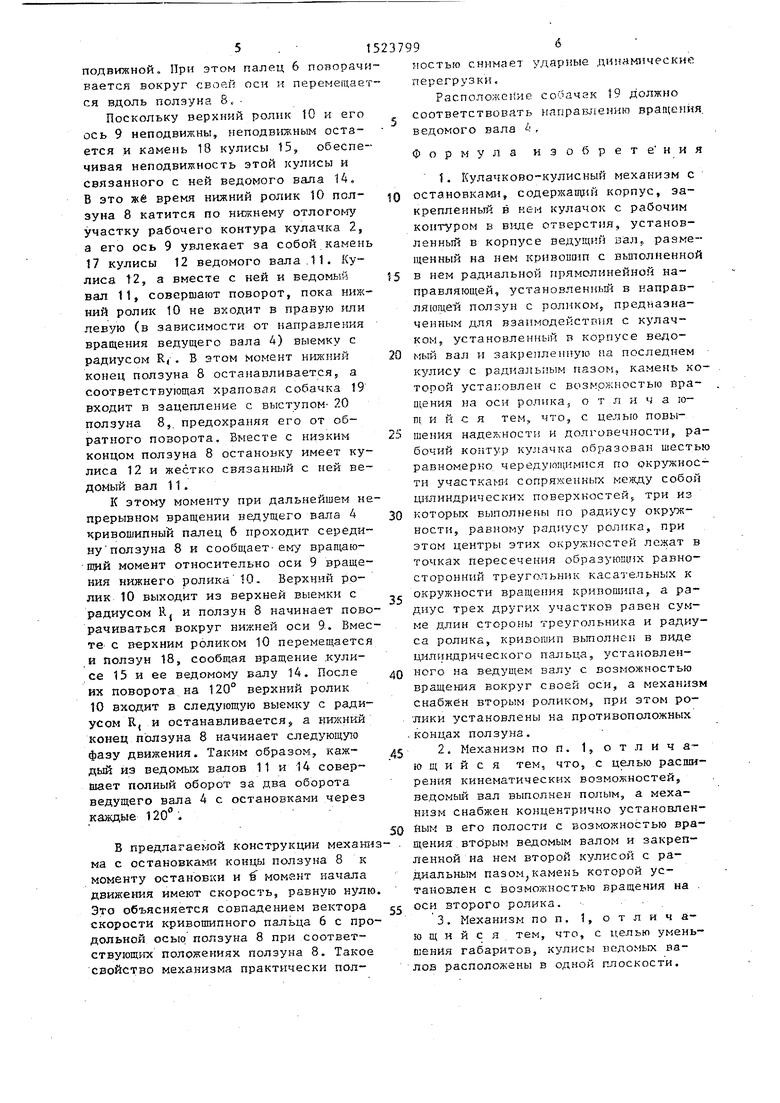
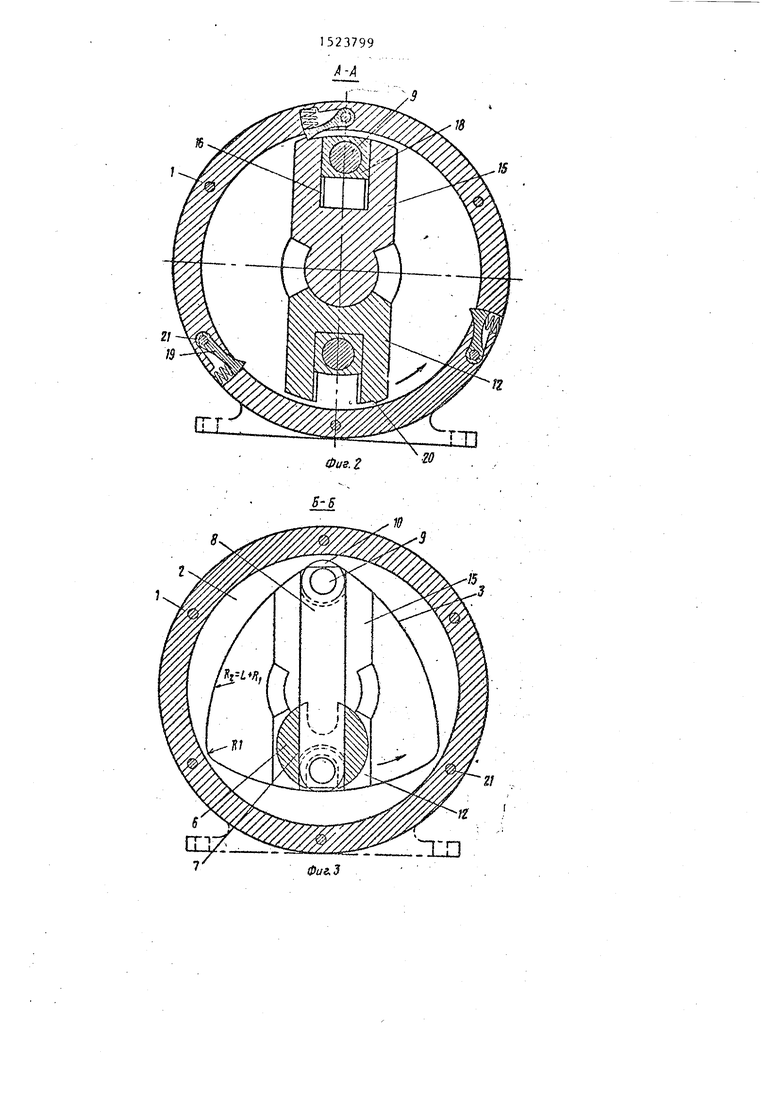
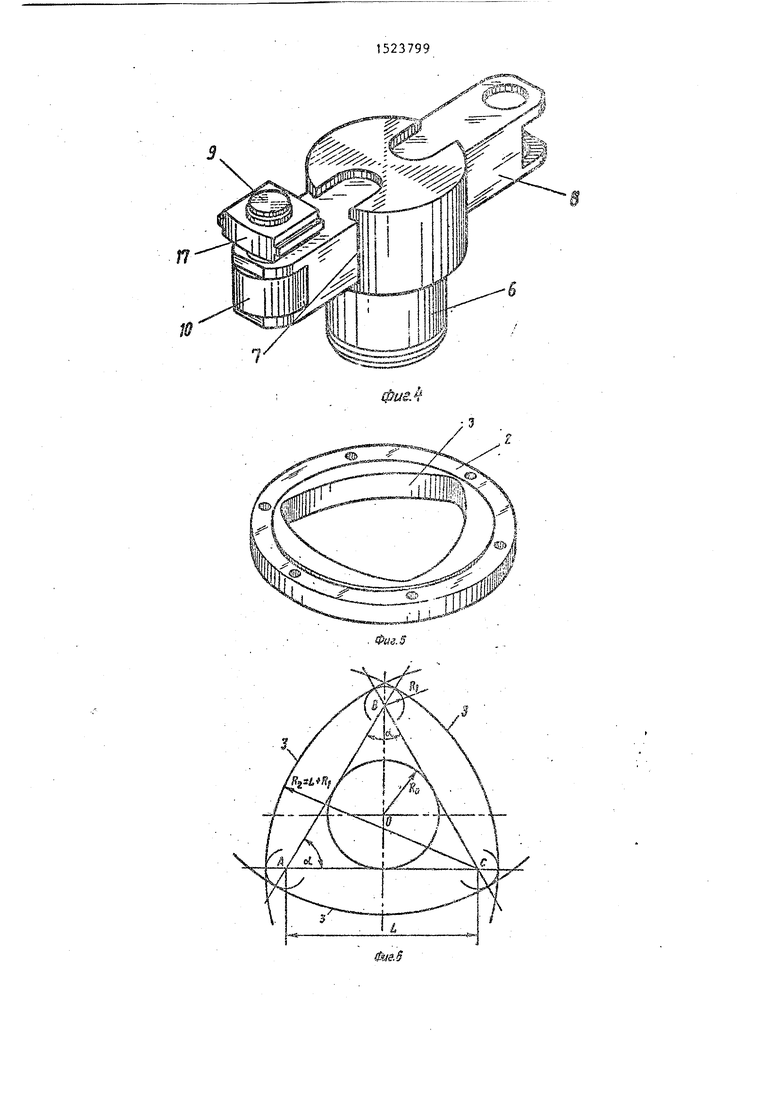
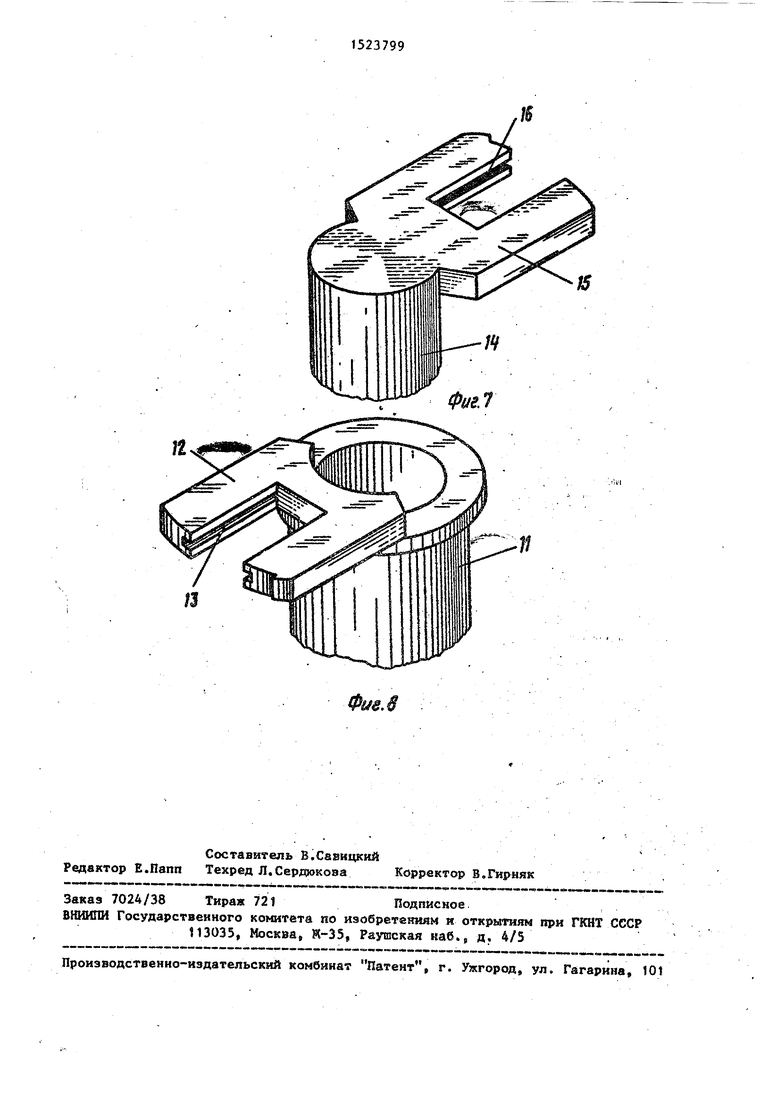
На фиг.1 показан механизм, продольный разрез-, на фиг.2 сечеиие А-А на фиг. 1, на фиг. 3 - сечение Б-В на фиг.1; на фиг.4 - конструкция кривошипного пальца с ползуномj на фиг.5 - конструкция кулачка; на фиг.6 - схема построегшя рабочего контура кулачкаJ на фиг.7 и 8 - кон струкции ведомых валов с кулисами.
Механизм содержит корпус 1 из двух, часте:, закреплённый в их стыке кулачок 2 с рабочим контуром в виде отверстия 3, установленный в корпусе 1 ведущий вал 4 с диком 5, в котором с возможностью вращения вокруг своей оси установлен кривошипный палец 6. В пальце 6 выполнена радиальная прямолинейная направляющая 7, в которой установлен ползун 8. На обоих концах ползуна 8 на осях 9 имеются ролики 10, взаимодействующие со стен- ками отверстия 3 кулачка 2. Диаметр роликов 10 равен или меньше ширины направляющей 7 в кривошипном пальце 6. Противоположно и соосно ведущему валу 4 в корпусе 1 установлен полый ведомый вал 11 с закрепленной на нем ведомой кулисой 12, имеющей радиальный паз 13. В полости вала 11 кон- центричпо ему установлен второй ведо- мьй вал 14 с закрепленной на нем второй зедомой кулисой 15, имеющей диальмый паз 16. Камни 17 и 18 соот- вётстиенно кулис 12 и 15 установлены с возможностью вращения на соответ ствуюшлх осях 9 роликов 10. Сопрягаемые участки валов 11 и 14 и их кулис
0
5
0
5
0
5
0
5
12 и 15 выполнены так, чтд кулисы 12 и 15 лежат в одной плоскости, а валы 11 и 14 имеют возможность относительно поворота на угол не менее 120° (фиг. 7 и 8).
Рабочий контур кулачка 2 (фиг.5 и 6) образован шестью равномерно чередующимися по окружности участками сопряженных кемщу собой цилиндтжчес- кик поверхностей, три из которых вы полнены по радиусу окружности R., равному радиусу ролика 10. Центры А, В и С этик окружностей лежат в точках пересечения образующих равносторонний треугольник ABC касательных ABs ВС и АС к окружности вращения кривошипного пальца f. Радиус Rg трех других участков рабочего контура кулачка 2 равен сумма длин L стороны треугольника ABC и радиуса R ролика 10. Расстояние между осями 9 .вращения роликов 10 также равно длине L стороны треугольника ABC.
В плоскости вращения кулис 12 и 15 в зонах рабочего контура кулачка 2с радиусом Е. расположены подпружинеянуе к корпусу 1 зфаповые собачки 19,- взаимодействующие со стопорными выступами 20, выполненными на ведомых кулисах 12 и 15. Ося- г-ш вращения собачек 19 могут быть стяжные болты 2 корпуса 1, Внутренняя полость корпуса 1 может быть заполнена маслом.
MexaimsM работает следующим образом. .
Пусть, например, исходное положение механизма показано на фнг,38 когда один из роликов 10 ползуна 8- нахо дится в верхней (в .;гпоскости чер-; тежа) выемке с радиусом, R, рабочего контура Кулзчка 2. При кепре рьюном вращении ведущего вала 4 его кривошипный палец 6 находящийся в нижней части рабочего контура кулачка 2s увлекает за собой нижнюю часть ползуна 8, в то время как. верх:-шя часть ползуна 8 остается .
подвижной. При этом палец 6 поворач вается вокруг своей оси и перемещае ся вдоль ползуна 8,
Поскольку верхний ролик 10 и его ось 9 неподвижны, неподвижным остается и камень 18 кулисы 15, обеспечивая неподвижность этой кулисы и связанного с ней ведомого вала 14. В это жй время нижний ролик 10 ползуна 8 катится по нижнему отлогому участку рабочего контура кулачка 2, а его ось 9 увлекает за собой камен 17 кулисы 12 ведомого вала.11. Кулиса 12, а вместе с ней и Бедомь1й вал 11, совершают поворот, пока нижний ролик 10 не входит в правую или левую (в зависимости от направления вращения ведущего вала 4) выемку с радиусом Rj . В этом момент нижний конец ползуна 8 останавливается, а соответствующая храповая собачка 19 входит в зацепление с выступом- 20 ползуна 8,. предохраняя его от обратного поворота. Вместе с низким концом ползуна 8 остановку имеет кулиса 12 и жестко связанный с ней ведомый вал 11.
К этому моменту при дальнейшем непрерывном вращении ведущего вала 4 кривошипный палец 6 проходит середи- ну ползуна 8 и сообщает-et-ry вращающий момент относительно оси 9 вращения нижнего ролика 10. Верхний ролик 10 выходит из верхней выемки с радиусом RJ и ползун 8 начинает поворачиваться вокруг нижней оси 9. Вместе- с верхним роликом 10 перемещается и ползун 18, сообщая вращение .кулисе 15 и ее ведомому валу 14. После их поворота на 120° верхний ролик 10 входит в следующую выемку с радиусом RJ и останавливаетсяJ а нижний конец п олзуна 8 начинает следующую фазу движения. Таким образом, каждый из ведомых валов 11 и 14 совершает полный оборот за два оборота ведущего вала 4 с остановками через каждые 120,
В предлагаемой конструкции механима с остановками концы ползуна 8 к моменту остановки и € момент начала двинсения имеют скорость, равную нулю Это объясняется совпадением вектора скорости кривошипного пальца 6 с продольной осью ползуна 8 при соответ- ствующ|-гх положениях ползуна 8. Такое свойство механизма практически пол-
23799и
HQCTbFo снимает ударные динамические перегрузки.
Расположе ие соОачгк 19 должно соответствовать напраш1е1- ию вращения, ведомого вала 4,
Формула изобрете ния
5 2. Механизм по п. 1, отличающийся тем, что, с целью расширения кинематических возможностей, ведомьш вал выполнен полым, а механизм снабжен концентричко установлен- 0 йым в его полости с возможностью вра- . щения,вторым ведомым валом и закрепленной на нем второй кулисой с радиальным пазом,камень которой установлен с возможностью вращения на . 5 оси второго ролика.- .
ггп
| Кулачково-кулисный механизм | 1975 |
|
SU522364A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
