СП
о 4
:
ф
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| Двухкоординатный линейный шаговый электродвигатель | 1987 |
|
SU1453548A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Машина для печатания тканей | 1976 |
|
SU674936A1 |
| Машина для печатания тканей | 1977 |
|
SU802091A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ГАЗОТУРБОИОННЫМИ ДВИГАТЕЛЯМИ | 2000 |
|
RU2190560C2 |
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР | 1999 |
|
RU2145509C1 |
| УСТАНОВКА ЭЛЕКТРОШЛАКОВОГО ПЕРЕПЛАВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2011 |
|
RU2486264C2 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2016 |
|
RU2628797C1 |
| Шаговый конвейер | 1984 |
|
SU1234310A1 |
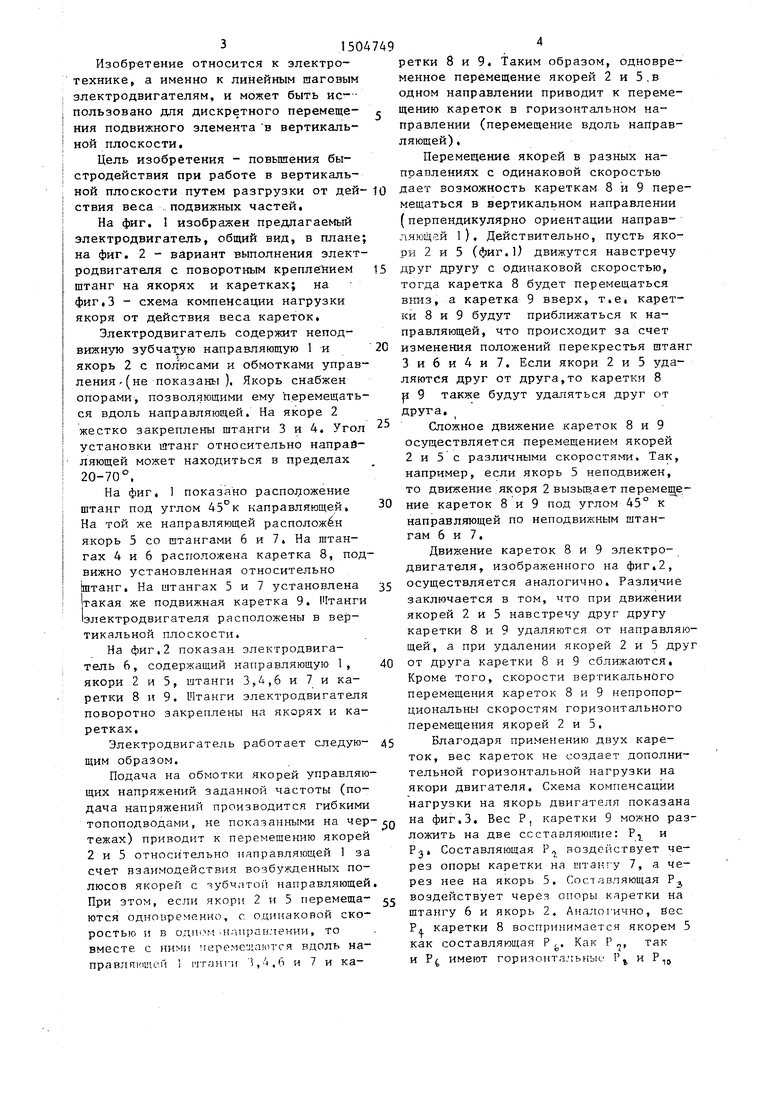
Изобретение относится к электротехнике и может быть использовано для дискретного перемещения подвижного элемента в вертикальной плоскости. Цель состоит в повышении быстродействия при работе в вертикальной плоскости путем разгрузки от действия веса подвижных частей. Устройство содержит неподвижную зубчатую направляющую 1, на которой перемещаются якори 2 и 5, на которых закреплены одними концами штанги 3, 4 и 6, 7. Другими концами они связаны с каретками 8, 9, расположенными в вертикальной плоскости. При перемещении якорей 2, 5 одновременно с одинаковой скоростью и в одном направлении вместе с ними перемещаются каретки 8, 9 в горизонтальном направлении. Перемещение якорей 2, 5 в разных направлениях с одинаковой скоростью дает возможность кареткам 8, 9 перемещаться в вертикальном направлении. При перемещении якорей с различными скоростями каретки совершают сложное движение. При этом вес кареток 8, 9 не создает дополнительной нагрузки на якори 2, 5 двигателя. 1 з.п. ф-лы, 3 ил.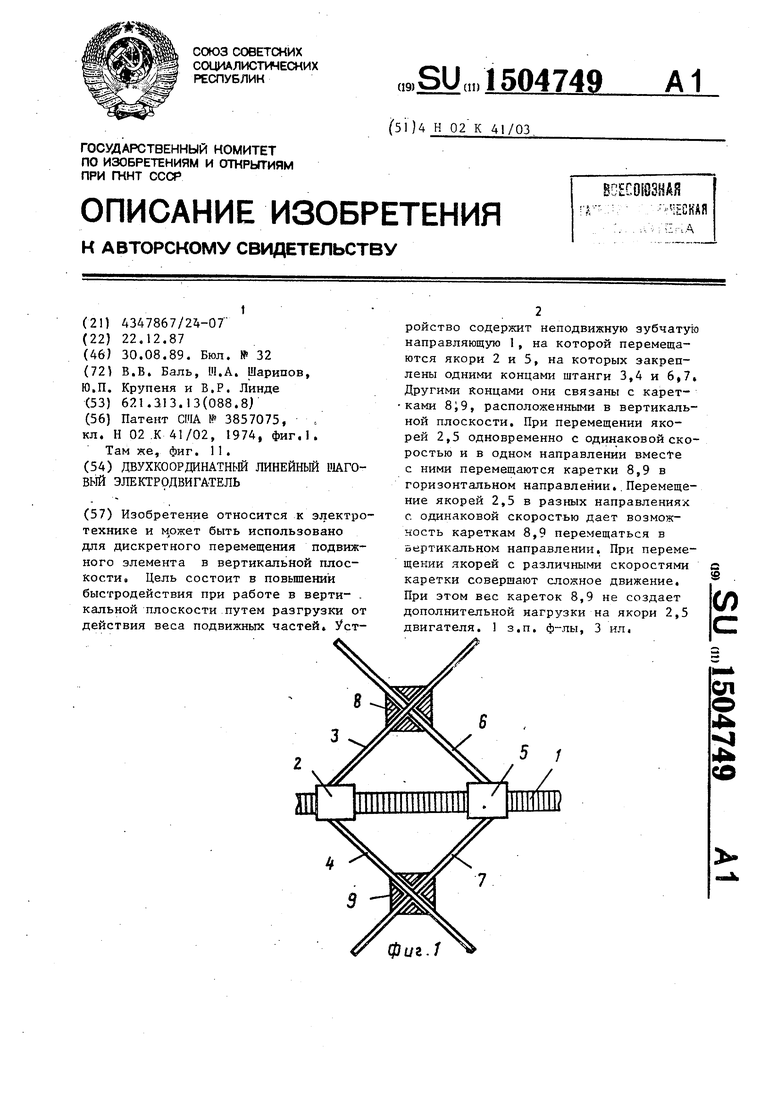
фиг Г
3150
Изобретение относится к электротехнике, а именно к линейным шаговым электродвигателям, и может быть ис--- пользовано для дискретного перемеще- кия подвижного элемента в вертикальной плоскости.
Цель изобретения - повьшения быстродействия при работе в вертикальной плоскости путем разгрузки от дей- ствия веса .подвижных частей,
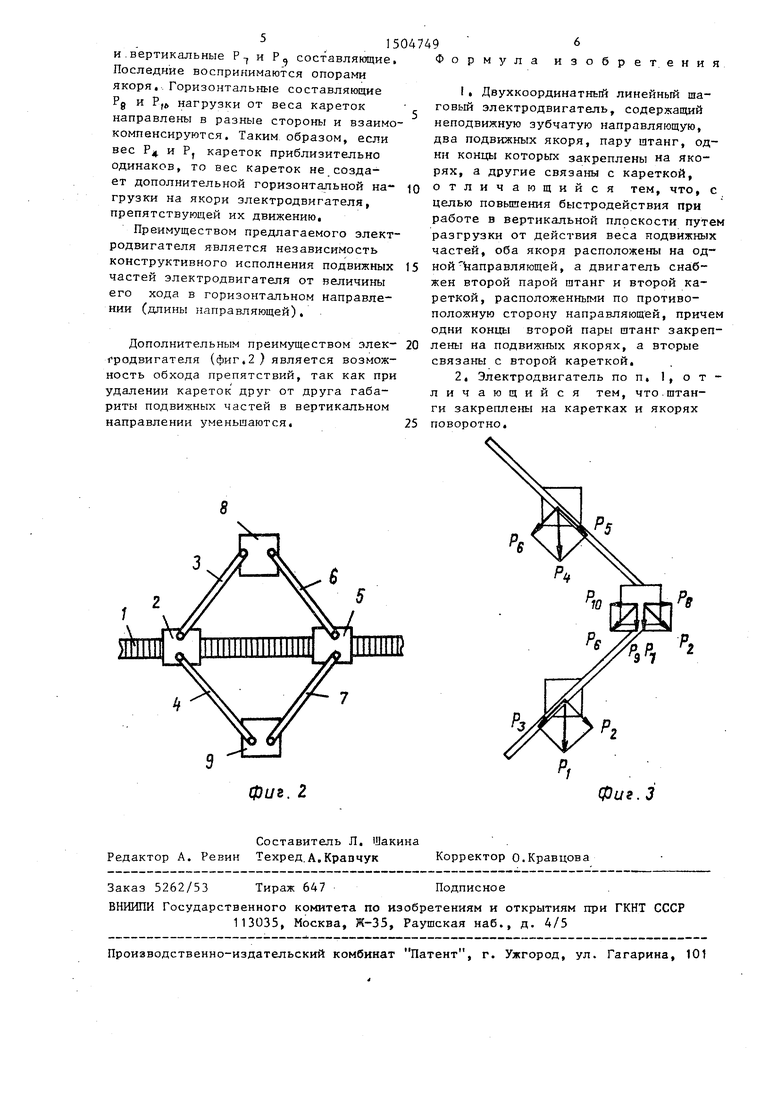
На фиг. I изображен предлагаемый электродвигатель, общий вид, в плане; на фиг. 2 - вариант выполнения электродвигателя с поворотным креплением штанг на якорях и каретках; на фиг,3 - схема компеисации нагрузки якоря от действия веса кареток.
Электродвигатель содержит неподвижную зубчатую направляющую 1 и якорь 2 с пол юсами и обмотками управления-(не показаны ), Якорь снабжен опорами, позволяющими ему перемещаться вдоль направляющей. На якоре 2 жестко закреплены штанги 3 и 4. Угол установки йтанг относительно направляющей может находиться в пределах 20-70°.
На фиг. 1 показано распо южение штанг под углом направляющей. На той же направляющей расположен якорь 5 со штангами 6 и 7. На штангах 4 и 6 расположена каретка 8, подвижно установленная относительно Ьтанг. На штангах 5 и 7 установлена такая же подвижная каретка 9. Штанги электродвигателя расположены в вертикальной плоскости.
На фиг,2 показан электродвигатель 6, содержащий наггравляющую I, якори 2 и 5, штанги 3,4,6 и 7 и каретки 8 и 9, 1Чтанги электродвигателя поворотно закреплены на якорях и каретках.
Электродвигатель работает следую- щим образом.
Подача на обмотки якорей управляющих напряжений заданной частоты (подача напряжений производится гибкими топоподводами, не показанными на SP тежах) приводит к перемещению якорей 2 и 5 относительно направляющей 1 за счет взаимодействия возбужденных полюсов якорей с яубчато направляющей При этом, если якори 2 и 5 перемеща- ются одновременно, с одинаковой скоростью и в ОД111.Ч- чнапраг лении, то вместе с ними перемеглаются вдоль на- правлпки.чей 1 1 ггаиги , ч, 6 и 7 и каретки 8 и 9. Таким образом, одновременное перемещение якорей 2 и 5.в одном направлении приводит к перемещению кареток в горизонтальном направлении (перемещение вдоль направляющей) .
Перемещение якорей в разных направлениях с одинаковой скоростью дает возможность кареткам 8 и 9 перемещаться в вертикальном направлении (перпендикулярно ориентации направляющей l). Действительно, пусть якори 2 и 5 (фиг.1) движутся навстречу друг другу с одинаковой скоростью, тогда каретка 8 будет перемещаться вниз, а каретка 9 вверх, т.е. каретки 8 и 9 будут приближаться к направляющей, что происходит за счет изменения положений перекрестья штан 3 и 6 и 4 и 7. Если якори 2 и 5 удаляются друг от друга,то каретки 8 р 9 также будут удаляться друг от друга.
Сложное движение кареток 8 и 9 осуществляется перемещением якорей 2 и 5 с различными скоростями. Так, например, если якорь 5 неподвижен, то движение якоря 2 вызыв.ает перемещение кареток 8 и 9 под углом 45° к направляющей по неподвижным штангам 6 и 7.
Движение кареток 8 и 9 электродвигателя, изображенного на фиг.2, осуществляется аналогично. Различие заключается в том, что при движении якорей 2 и 5 навстречу друг другу каретки 8 и 9 удаляются от направляющей, а при удалении якорей 2 и 5 дру от друга каретки 8 и 9 сближаются. Кроме того, скорости вертикального перемещения кареток 8 и 9 непропорциональны скоростям горизонтального перемещения якорей 2 и 5.
Благодаря применению двух кареток, вес кареток не создает дополнительной горизонтальной нагрузки на якори двигателя. Схема компенсации нагрузки на якорь двигателя показана на фиг.З. Вес Р, каретки 9 можно разложить на две составляющие: Р и Pj. Составляющая Рл, воздействует через опоры каретки на штанг-у 7, а через нее на якорь 5. Составляющая Р воздействует через опоры каретки на штангу 6 и якорь 2. Аналогично, бес РЛ каретки 8 воспринимается якорем 5 как составляющая Р , Как Р„, так и Р имеют горизонтальные Р,, и Р ,
| Патент США № 3857075, / кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, фиг | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
