Изобретение относится к электротехнике, к линейным шаговым электро- двигателям, и может быть использовано для поступательного перемещения подвижного .элемента в плоскости.
Целью изобретения является увеличение хода по одной из координат.
На фиг. 1 показан предлагаемый электродвигатель, обп1ий вид в плане; на фиг. 2 и 3 - схема перемещения каретки в сторону направляющих.
Двухкоординатный линейный шаговый электродвигатель содержит две неподвижные параллельные зубчатые направляющие 1 и 2, выполненные из ферромагнитного материала, первую пару якорей 3 и 4, снабженных зубчатыми пол1осами и обмотками управления (не показаны), связанных друг с другом есткой штангой 5, -вторую пару якорей 6 и 7 с зубчатыми полюсами и обмоткаи управления, связанных между собой есткой штангой 8, и каретку 9. Яко- риЗ, 4и6, 7 снабжены опорами (например, опорами качения), обеспечивающими их подвижное закрепление на направляющих 1 и 2. Каретка также снабжена опорами, обеспечивающими ее подвижное закрепление на штангах 5 и 8. Якори связаны с блоком управления двигателя гибрсими токо- подводами 10 и 11.
Предлагаемый двигатель работает следующим образом.
Подача на обмотки управления каждого якоря многофазного переменного напряжения питания вызывает возникновение бегущего магнитного поля якоря, взаимодействие которого с зубчатой направляющей приводит к появлению тягового усилия. При этом якорь начинает перемещение в направлении движения бегущего магнитного поля. Якори 3 и 4 управляются синхронно, одновременно перемещаются в том или другом направлении. Также одновременно синхронно перемещаются якори 6 и 7. Перемещение каретки 9 в продольном направлении (направ-
5
0
5
0
5
0
5
ление ориента1(ии направляющих 1 и 2) осуществляется одновременным перемещением всех якорей 3, 4, 6 и 7 в одном направлении. Поперечное перемещение каретки происходит при движении якорей 3 и 4 в одном, а якорей 6 и 7 в другом направлении. Так при движении якорей 3 и 4 вправо, а якорей 6 и 7 влево каретка 9 перемещается в сторону направляющей 1 (фиг.. 2), Движение якорей 3 и 4 вл.- во, а якорей 6 и 7 вправо приводит к перемещению каретки 9 в сторону направляющей 2 (фиг. 3). При неодинаковых скоростях движения якорей 3, 4 и 6, 7 реализуется перемещение каретки 9 по любой заданной траектории.
Благодаря расположению всех якорей двигателя на двух неподвижных параллельных зубчатых направляющих величина хода двигателя вдоль направляющей оказывается практически неограниченной, так как направляющие могут быть выполнены любой необходимой длины. В результате отсутствия подвижных зубчатых траверс двигатель имеет сравнительно небольшую массу подвижных частей и высокое быстродействие...
Формула изобретения
Двухкоординатный линейный шаговый электродвигатель, содержащий две неподвижные параллельные зубчатые направляюпще, первую пару подвижных якорей, связанных между собой жесткой штангой и расположенных на направляющих, вторую пару подвижных якорей, связанных между собой жесткой штангой, и каретку подвижно закрепленную на штангах, отличающийся тем, что, с целью увеличения хода по одной из координат, вторая пара якорей расположена на тех же зубчатых направляющих, что и первая, а длина штанг выполнена большей расстояния между направлякяцими.
Fv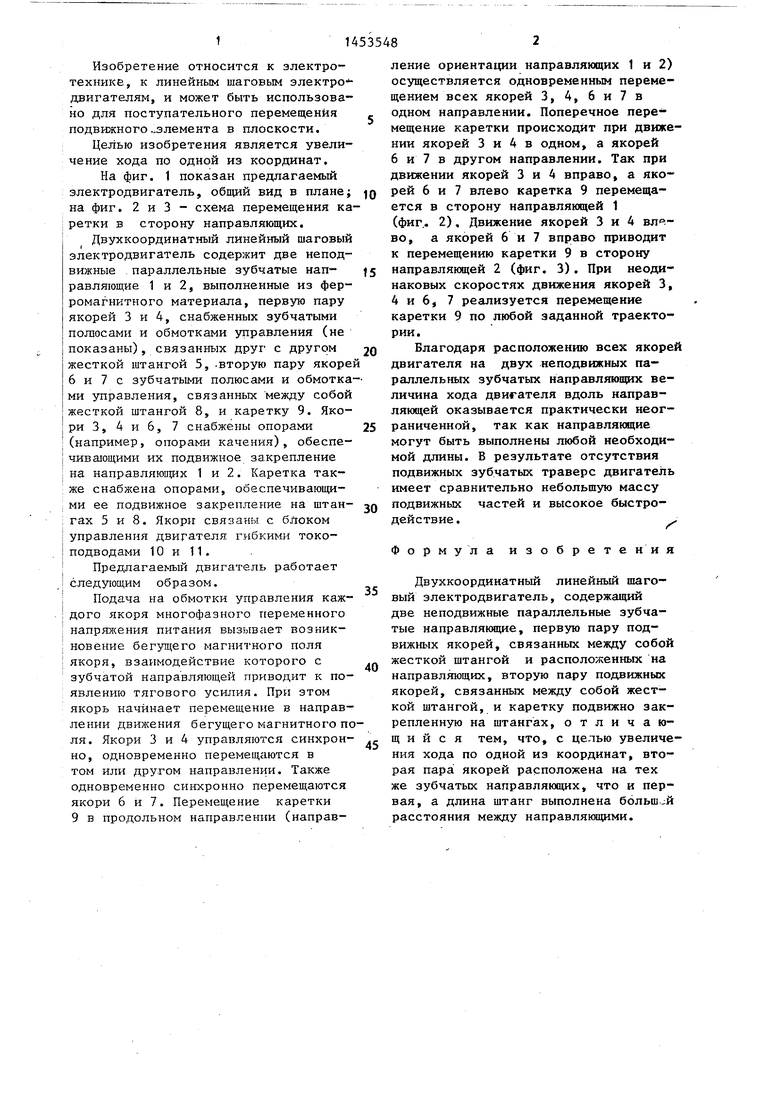
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный линейный шаговый электродвигатель | 1987 |
|
SU1504749A1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1374361A1 |
| Устройство для раскладки проводов в жгуты | 1984 |
|
SU1282370A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| Станок для наложения корпусной ленточной изоляции на обмотки электрических машин | 1977 |
|
SU692009A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2541518C1 |

Изобретение относится к электротехнике, а именно к линейным шаговым электродвигателям, и может быть использовано для поступательного перемещения подвижного элемента в плоскости. Цель состоит в увеличении хода по одной из координат. Устройство содержит две неподвижные ферромагнитные зубчатые направляющие 1 и 2, якори 3, 4и6, 7, подвижно закрепленные на направлякщих. Якори 3 4 и 6, .7 жестко связаны попарно друг с другом штангами 5 и 8 соответственно. Каретка 9 подвижно закреплена на штангах 5 и 8 якорей двигателя. Величина хода двигателя вдоль направляющей практически неограничена, так как направляющие 1 и 2 могут быть выполнены любой длины. 3 ил. сл 4 ел 00 СП 4 00 9uf.1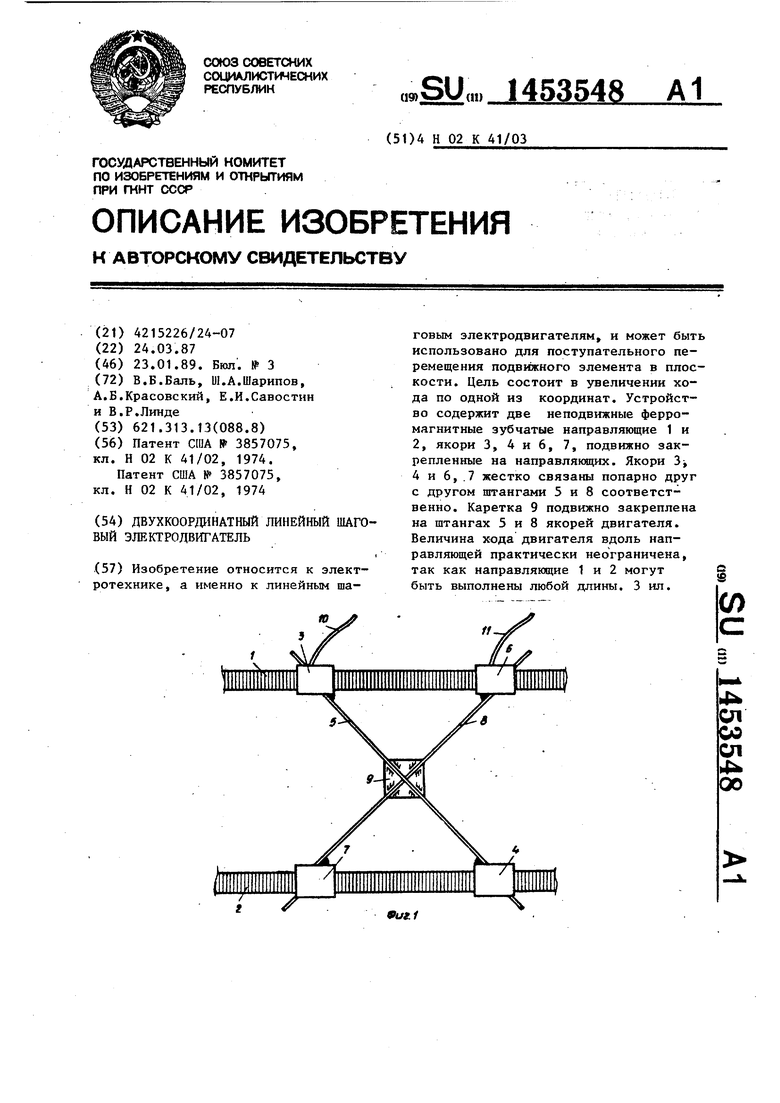
| Патент США № 3857075, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3857075, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
