1
(21)4672439/11
(22) 04.04.89
(46) 15.10.91. Бюл. №38
(71)Научно-производственное объединение Комплекс
(72)А.В.Загарев (53)621.876(088.8)
(56)Заявка ФРГ
№ 3629032, кл. В 66 В 1/04,1988.
(54) ПОДЪЕМНЫЙ МЕХАНИЗМ
(57)Изобретение относится к подъемно- транспортному машиностроению, в частности к подъемным механизмам. Цель изобретения - повышение надежности в ра А
боте путем обеспечения регулирования натяжения тягового органа. Механизм содержит привод, грузовой элемент 3 и противовес 7, связанные между собой вертикально-замкнутым контуром гибкого тягового органа, включающим верхнюю 5 и нижнюю 9 ветви, причем последняя огибает звездочку 11 привода подъема. Точка закрепления противовеса 7 к верхней ветви 5 расположена между точкой крепления нижней ветви 9 и центром тяжести противовеса 7, причем последний установлен с возможностью поворота в плоскости контура тягового органа и взаимодействия с концевым выключателем 16 цепи управления. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема штучных грузов | 1989 |
|
SU1632880A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Подъемник | 1985 |
|
SU1357335A1 |
| Подъемно-транспортное устройство | 1987 |
|
SU1477663A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2005 |
|
RU2302990C1 |
| Подъемник | 1984 |
|
SU1298172A1 |

(Л
о
00
45к КЭ
Изобретение относится к подъемно- транспортному машиностроению, в частности к подъемным механизмам, используемым в складских подъемниках.
Цель изобретения - повышение надежности в работе путем обеспечения регулирования натяжения тягового органа.
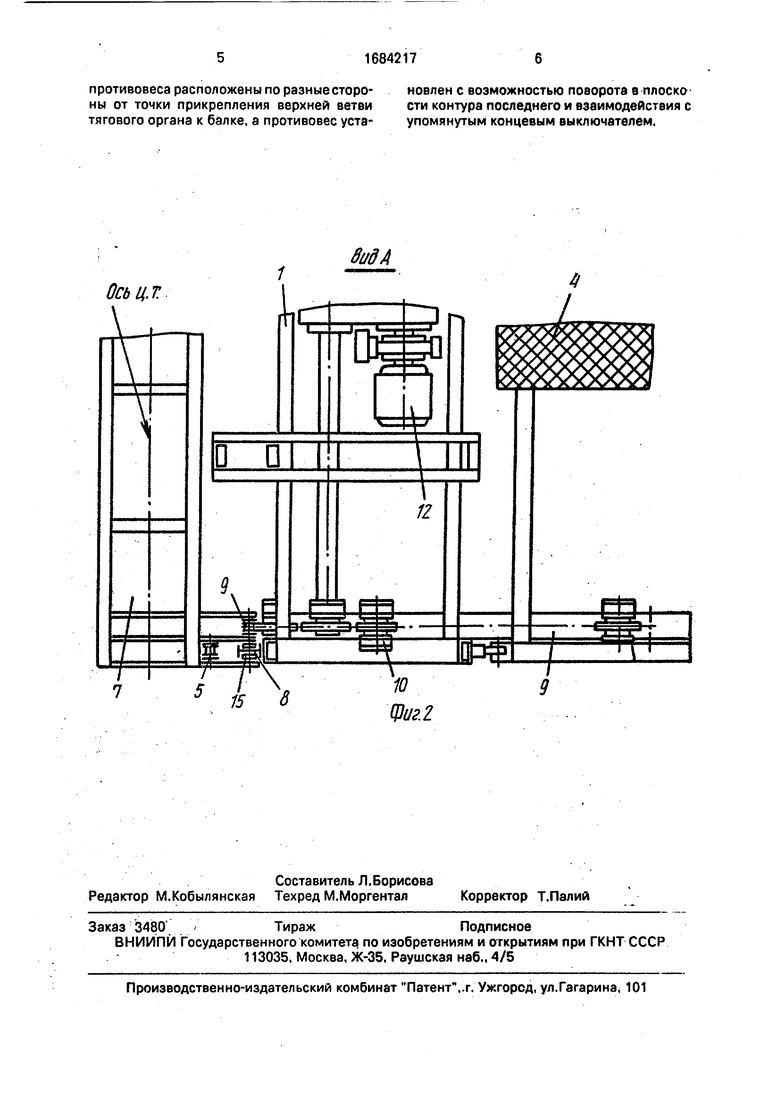
На фиг.1 изображен подъемный механизм, общий вид; на фиг.2 - вид А на фиг.1.
Подъемный механизм, например для башенного склада, содержит металлоконструкцию 1, образующую два стеллажных блока с проемом между ними. В проеме с возможностью вертикального перемещения в направляющих 2 установлен грузовой элемент 3, несущий захват 4. Грузовой элемент 3 при помощи верхней ветви 5 гибкого тягового органа, например цепного, перекинутого через верхнюю часть металлоконструкции и поддерживаемого звездочками 6, связан с противовесом 7, также установленным с возможностью вертикального перемещения по направляющим 8. Масса противовеса 7 приблизительно соответствует массе грузового элемент 3 вместе с половиной массы полезного груза. Грузовой элемент 3 и противовес 7 связаны также нижней ветвью 9 гибкого тягового органа, которая огибает нижние поддерживающие звездочки 10 и приводную звездочку 11 привода 12 подъема. Ветвью 9 вместе с ветвью 5 образуют замкнутый контур тягового органа, расположенный в вертикальной плоскости.
Противовес 7 снабжен балкой 13, кон- сольно закрепленной на его верхней поверхности в плоскости тягового контура. Точка подвеса противовеса к верхней ветви 5 тягового органа смещена от центра тяжести (ЦТ) противовеса 7 в сторону конца балки 13. на котором в свою очередь закреплен конец нижней ветви 9 тягового органа. Таким образом, точка закрепления верхней ветви 5 тягового органа находится между точкой закрепления нижней ветви 9 и проекции центра тяжести противовеса на продольную ось балки 13. Нижняя ветвь 9 тягового органа закреплена на балке 13 посредством промежуточной каретки 14, взаимодействующей при помощи катков 15 с направляющей 8. Каретка 14 шарнирно связана с концом балки 13. Таким образом, противовес 7 имеет возможностью поворота в вертикальной плоскости, совпадающей с плоскостью контура тягового органа. Поворот противовеса ограничен концевым выключателем 16, который сигнализирует о вытяжении тягового органа.
Механизм работает следующим образом.
При включении привода 12 подъема звездочка 10 вызывает перемещение нижней ветви 9 тягового органа, которая увлекает в движение связанные с ней грузовой
5 элемент 3, верхнюю ветвь 5 цепи и противовес 7. Грузовой элемент 3 доставляет груз на нужный этаж стеллажного блока 1 и при помощи захвата 4 перемещает груз в ячейку стеллажа или из нее.
0 Для осуществления движения грузоподъемника 3 в противоположную сторону производят реверс привода 12.
При вытяжении ветвей 5 и 9 под действием переменной нагрузки от груза или
5 вследствие износа тяговый орган удлиняется. Благодаря закреплению концов ветвей цепи на балке противовеса 7 со смещением относительно его центра тяжести противовес 7 поворачивается вокруг точки крепле0 ния верхней ветви 5 под действием собственного веса и отклоняет конец балки 13 вверх, продвигая каретку 14 по направляющим 8, создавая усилия предварительного натяжения тягового органа.
5Это вызывает натяжение нижней ветви
9тягового органа и выбор его слабины, обеспечивая стабильный характер взаимодействия приводного 11 и поддерживающих
10элементов стяговым органом механизма. 0 При повороте противовеса 7 на угол,
превышающий расчетное допустимое значение, он взаимодействует с выключателем 16, сигнализирующем о положении противовеса. Привод останавливают и произво5 дят осмотр и оценку состояния износа тягового органа, который затем укорачивают или заменяют.
Формула изобретения Подъемный механизм, содержащий
0 привод перемещения грузового элемента, связанного с противовесом посредством установленных на перекрытии и в нижней части металлоконструкции отклоняющих элементов и тягового органа, имеющего
5 верхнюю и нижнюю ветви, отличающийся тем, что, с целью повышения надежности в работе путем обеспечения регулирования натяжения тягового органа, он снабжен кинематической связью, соединяющей кон0 цы верхней и нижней ветвей тягового органа с противовесом, состоящей из консольной балки, жестко связанной с противовесом, и каретки с концевым выключателем системы управления приводом перемеще5 ния, при этом указанная верхняя ветвь тягового органа прикреплена к средней части балки, а нижняя ветвь - к каретке в точке, лежащей на одной прямой с осью крепления балки и каретки одна к другой, причем точка крепления нижней ветви и центр тяжести
противовеса расположены по разные стороны от точки прикрепления верхней ветви тягового органа к балке, а противовес устаОсьц.т.
15 В
новлен с возможностью поворота в плоско сти контура последнего и взаимодействия с упомянутым концевым выключателем.
Вод А
