t
Изобр етение относится к электротехнике и может быть использовано для привода механизмов с синхронно- синфазным вращением валов.
Цель изобретения - обеспечение заданной точности фазирования в переходных режимах.
На фиг.1 представлена блок-схема устройства; на фиг.2 - структурная схема интегрирующего блока; на фиг.3 - диаграммы работы устройства.
Устройство для управления многодвигательным электроприводом (фиг.1) содержит п систем 1 фазовой автоподстройки частоты вращения, задающий блок 2, составленный из соединенных последовательно генератора 3 опорной частоты, преобразователя 4 кода в частоту, интегрирующего блока 5, формирователя 6 фазирующих импульсов, выход которого подключен к первым входам п систем 1 фазовой автоподстройки частоты вращения, выход интегрирующего блок 5 подключен к вторым входам п систем 1 фазовой автоподстройки частоты вращения, интегрирующий блок 5 (фиг.2) составлен из соединенньгк последовательно импульсного частотно-фазового дискриминатора 7, интегратора 8, корректируюп1его элемента 9 и управляющего генератора 10, выход которого подключен к одному входу импульсного частотно-фазового дискриминатора 7 и образует выход интегрирующего блока, другой вход импульсного частотно-фазового дискриминатора 7 образует вход интегрирующего блока 5, другой вход преобразователя 4 кода в частоту снаб- ;жен зажимом для подключения регу- .лятора частоты вращения.
Система 1 фазовой автоподстройки частоты вращения содержит блок 11 фазовой автоподстройки частоты вращения, фазирующий блок 12, элемент 13 сравнения, один вход которого образует первый вход системы 1 фазовой автоподстройки частоты вращения, другой вход подключен к выходу последней, а выход элемента 13 сравнения через фазирующий блок 12 подключен к одному входу блока 11 фазовой автоподстройки частоты вращения, другой вход которого образует второй вход системы 1 фазовой автоподстройки частоты вращения
200982
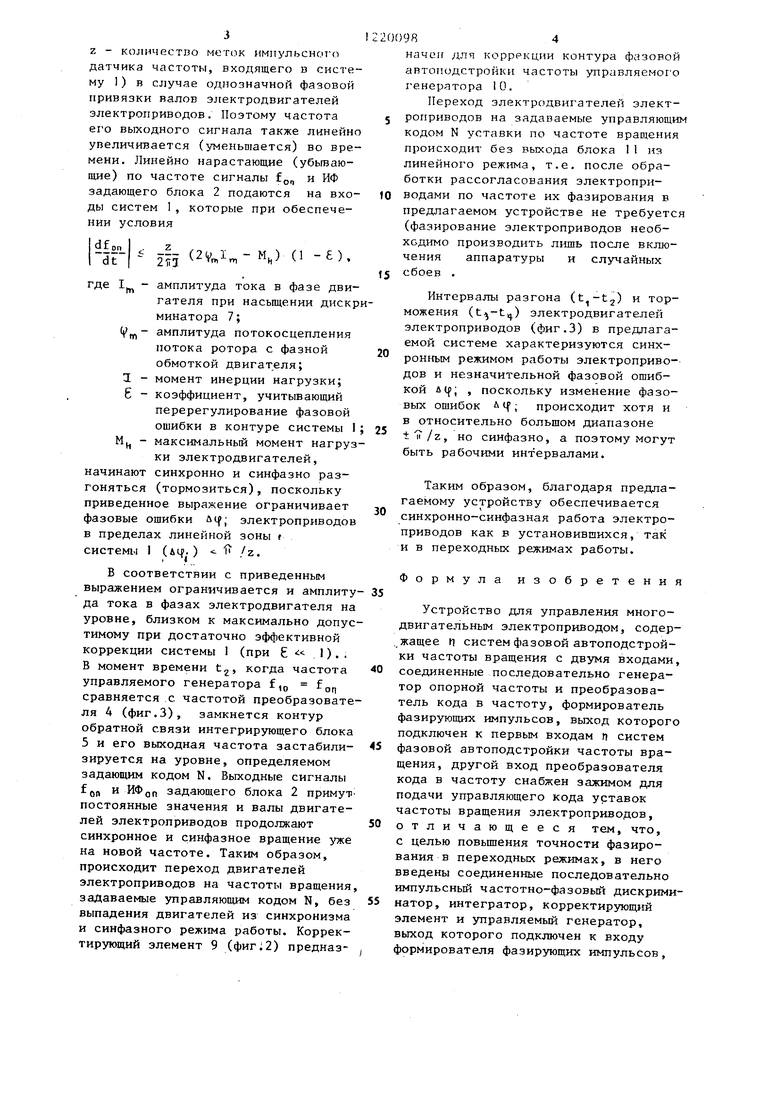
На фиг. 3 дана диа1 рамма работы устройства, где показана диаграмма 14 изменения задающе1 о сигнала на входе преобразователя 4 кода, в 5 частоту; изменение напряжения 15 на его выходе; диаграмма 16 изменения напряжения на выходе управляемого генератора 10; диаграммы 17, 18 изменения фазы роторов двух
10 электроприводов при скачкообразном изменении задающех о сигнала; диаграмма i 9 изменения фазового рассо-. гласов.ания указанных приводов. Устройство работает следующим
15 образом.
В установивщемся режиме валы электродвигателей всех п синхронно-синфазных элементоприводов вращаются синхронно с частотой f зада20 ющего блока 2 и синфазно с.импульсами фазирования И 9 , причем ошибка по фазе лср между двумя какими- либо электроприводами, например между первым и вторым ACf йс|, - Л(|
25 может принимать сколь угодно малое значение. При смене управляющего кода в сторону, соответствующую увеличению (уменьшению) частоты вращения электродвигателей, преобра30 зователь 4 кода в частоту формирует больщую (меньшую) частоту f ц на выходе, дискриминатор 7 (фиг.2) входит в насыщение, поскольку нарушилось равенство частот сигналов на его входах. Сигнал насыщения (114) поступает на вход интегратора 8, выходное напряжение которого начинает линейно нарастать (убывать):
,, ,dt, W о
где с - постоянная интегрирования;
Ug - значение выходного напряжения интегратора 8 в установивщемся режиме.
Напряжение Ug через корректирующий элемент 9 управляет частотой управляемого генератора 10:
10
Q где ,(, - коэффициент передачи триггера.
Таким образом, выходная частота задающего блока 2 f является линейно нарастающей (убывающей) функ- 55 цией времени (фиг.З). Формирователь фазирующих импульсов представляет собой обьшный делитель частоты с коэффициентом деления К z (где
z - количество меток импульснот о датчика частоты, входящего в систему 1 ) в случае однозначной фазовой привязки валов электродвигателей электроприводов. Поэтому частота ei o выходного сигнала также линейно увеличивается (уменьпшется) во времени. Линейно нарастающие (убьгеаю- щие) по частоте сигналы „„ и ИФ задающего блока 2 подаются на входы систем 1, которые при обеспечении условия
dt
- MJ (1 -),
где 1 - амплитуда тока в фазе двигателя при насыщении дискриминатора 7;
V - амплитуда потокосцепления потока ротора с фазной обмоткой двигателя; 1 - момент инерции нагрузки; 6 - коэффициент, учитывающий перерегулирование фазовой ошибки Б контуре системы 1; Мц - максимальный момент нагрузки электродвигателей, начинают синхронно и синфазно разгоняться (тормозиться), поскольку приведенное выражение ограничивает фазовые ощибки электроприводов в пределах линейной зоны t систем1.1 1 (лц . ) 1 /Z.
В соответствии с приведенным выражением ограШ1Чивается и амплитуда тока в фазах электродвигателя на уровне, близком к максимально допустимому при достаточно эффективной коррекции системы 1 (при ; I) . . В момент времени t когда частота управляемого генератора f,o f сравняется с частотой преобразователя А (фиг.З), замкнется контур обратной связи интегрирующего блока 5 и его выходная частота застабили- зируется на уровне, определяемом задающим кодом N. Выходные сигналы fо„ и ИФдп задающего блока 2 примуТ постоянные значения и валы двигателей электроприводов продолжают синхронное и синфазное вращение уже на новой частоте. Таким образом, происходит переход двигателей электроприводов на частоты вращения, задаваемые управляющим кодом N, без выпадения двигателей из синхронизма и синфазного режима работы. Корректирующий элемент 9 () предназ-
984
начеи для коррркции контура фазовой автогюдстройки частоты управляемог о генератора 10.
Переход электродвигателей элект- роприводов на задаваемые управляющим кодом N уставки по частоте врап;ения происходит без выхода блока 11 из линейного реж1-1ма, т.е. после обработки рассогласования электроприводами по частоте их фазирования в предлагаемом устройстве не требуется (фазирование электроприводов необходимо производить лишь после включения аппаратуры и случайных
сбоев ,
Интервалы разгона () и торможения () электродвигателей электроприводов (фиг.З) в предлагаемой системе характеризуются синхронным режимом работы электроприводов и незначительной фазовой ошибкой utp; , поскольку изменение фазовых ошибок U If ; происходит ХОТЯ И
в относительно большом диапазоне
.
± II /Z, но синфазно, а поэтому могут быть рабочими интервалами.
Таким образом, благодаря предлагаемому устройству обеспечивается синхронно-синфазная работа электроприводов как в установившихся, так ив переходных режимах работы.
Формула изобретения
Устройство для управления многодвигательным электроприводом, содер- , жащее П систем фазовой автоподстройки частоты вращения с двумя входами,
соединенные последовательно генератор опорной частоты и преобразователь кода в частоту, формирователь фазирующих импульсов, выход которого подключен к первым входам м систем
фазовой автоподстройки частоты вращения, другой вход преобразователя кода в частоту снабжен зажимом для подачи управляющего кода уставок частоты вращения электроприводов,
отличающееся тем, что, с целью повьшгения точности фазирования в переходных режимах, в него введены соединенные последовательно импульсный частотно-фазовый дискриминатор, интегратор, корректирующий элемент и управляемый генератор, выход которого подключен к входу формирователя фазирующих импульсов,
к вторым входам п систем фазовой автоподстройки частоты вращения и к одному входу импульсного частотнофазового дискриминатора, другой вход которого подключен к выходу преобразователя кода в частоту.
Фиг. 2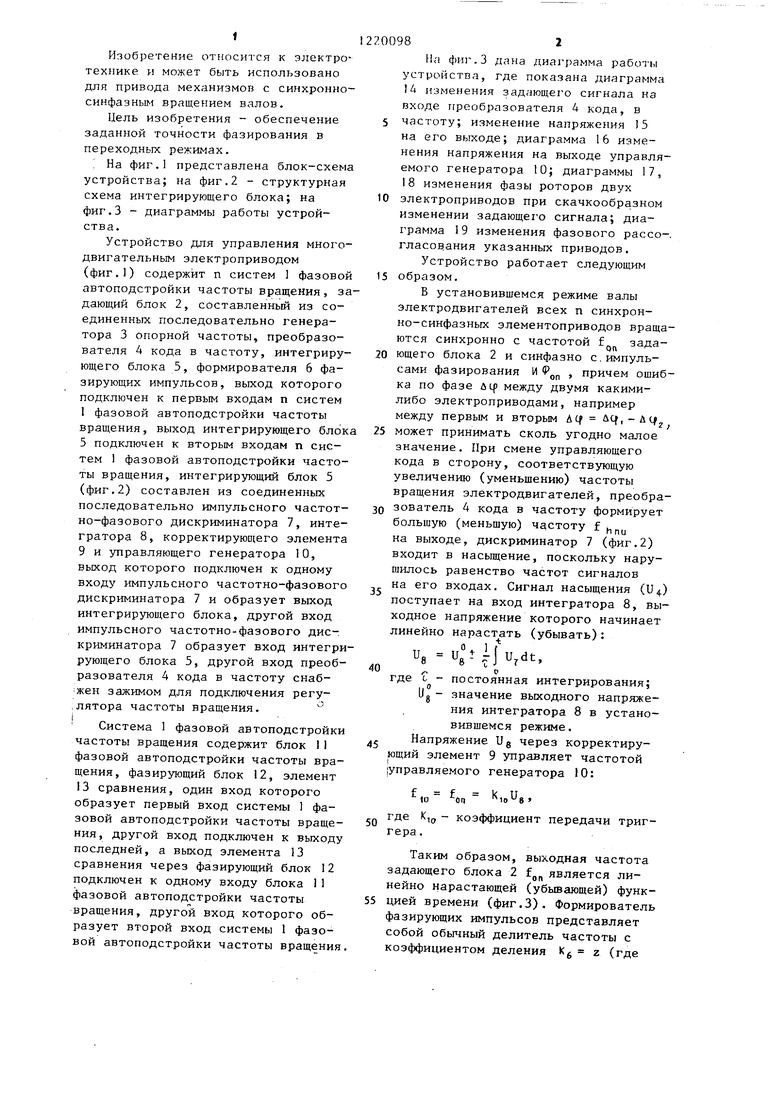
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| Устройство для управления статическим преобразователем частоты | 1982 |
|
SU1125731A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Способ фазирования вращающегося вала электродвигателя | 1982 |
|
SU1106000A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронного электродвигателя | 1983 |
|
SU1112516A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Электропривод постоянного тока | 1991 |
|
SU1781809A1 |
| Стабилизированный электропривод | 1987 |
|
SU1508334A1 |
Изобретение относится к злeктpo- технике и может быть использовано для привода .механизмов. Цель изобретения - обеспечение заданной точности фазирования многодвигательным электроприводом в переходных режимах. Устройство для управления многодвига- тельным электроприводом содержит п систем 1 фазовой автоподстройки частоты вращения, задающий блок 2, выполненный на генераторе опорной частоты 3, преобразователе кода в частоту 4, интегрирующем блоке 5, формирователе фазирующих импульсов 6. Введение частотно-фазов ого дискриминатора, интегратора, корректирующего элемента и управляющего генератора позволяет перейти двигателям электроприводов на частоты вращения, задаваемые управляющим кодом, без вьтадения двигателей из синхронно-синфазного режима работы как в установившихся, так и в переходных режимах. 3 ил. i (Л Фиг.1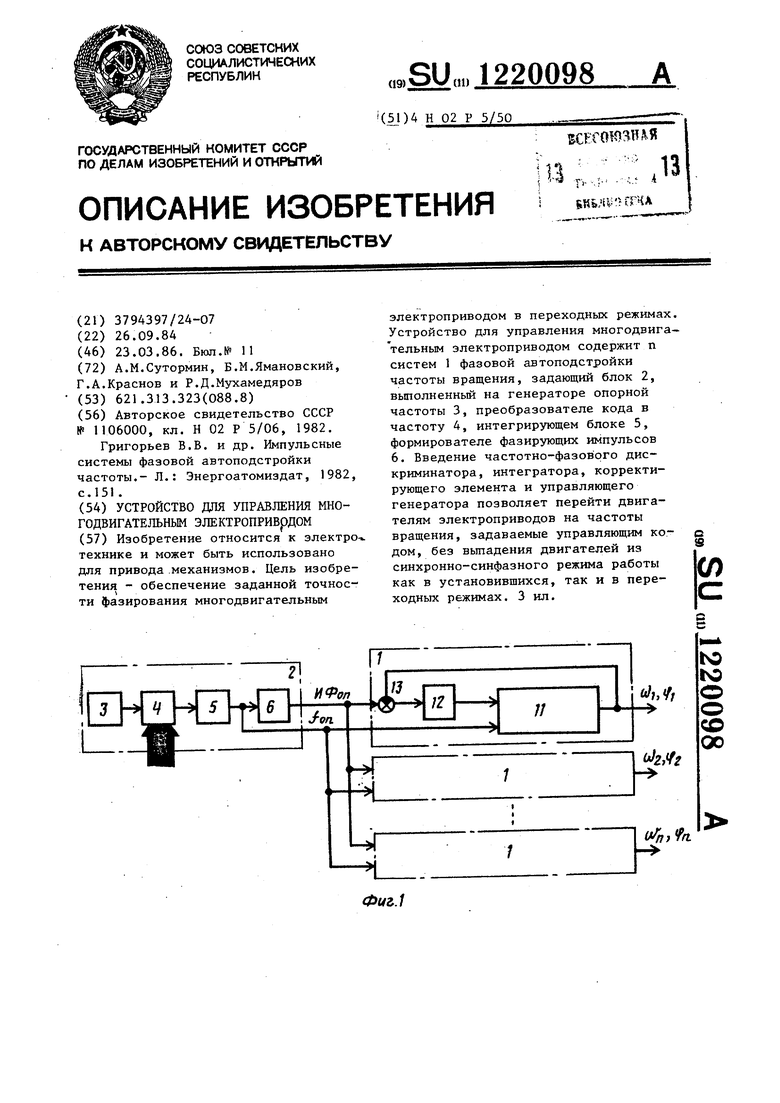
| Способ фазирования вращающегося вала электродвигателя | 1982 |
|
SU1106000A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Григорьев В.В | |||
| и др | |||
| Импульсные системы фазовой автоподстройки частоты.- Л.: Энергоатомиздат, 1982, с.151. | |||
