05
ta
ю
со
ф 00
Изобретение относится к электротехнике, а именно к устройствам автоматического фазирования синхронизированных электроприводов с фазовой автоподстройкой частоты вращения по опорному импульсному сигналу, и может быть использовано в системах записи и воспроизведения информации.
Цель изобретения - улучшение динамических характеристик устройства в режиме фазирования.
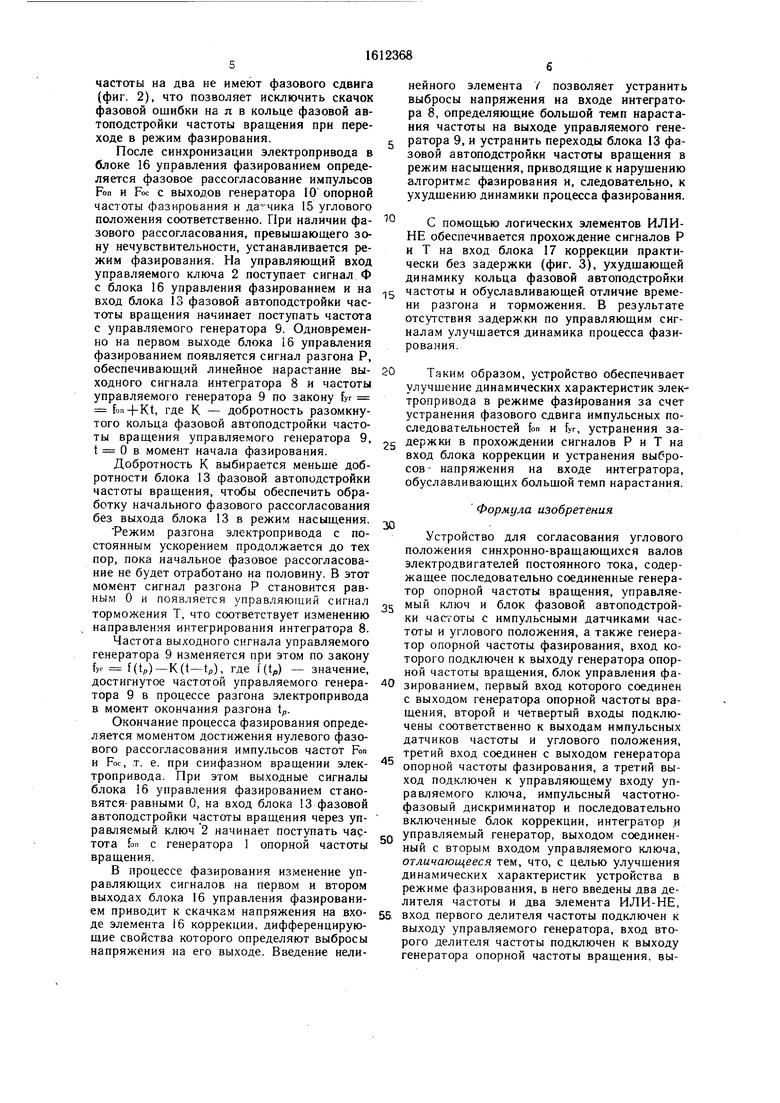
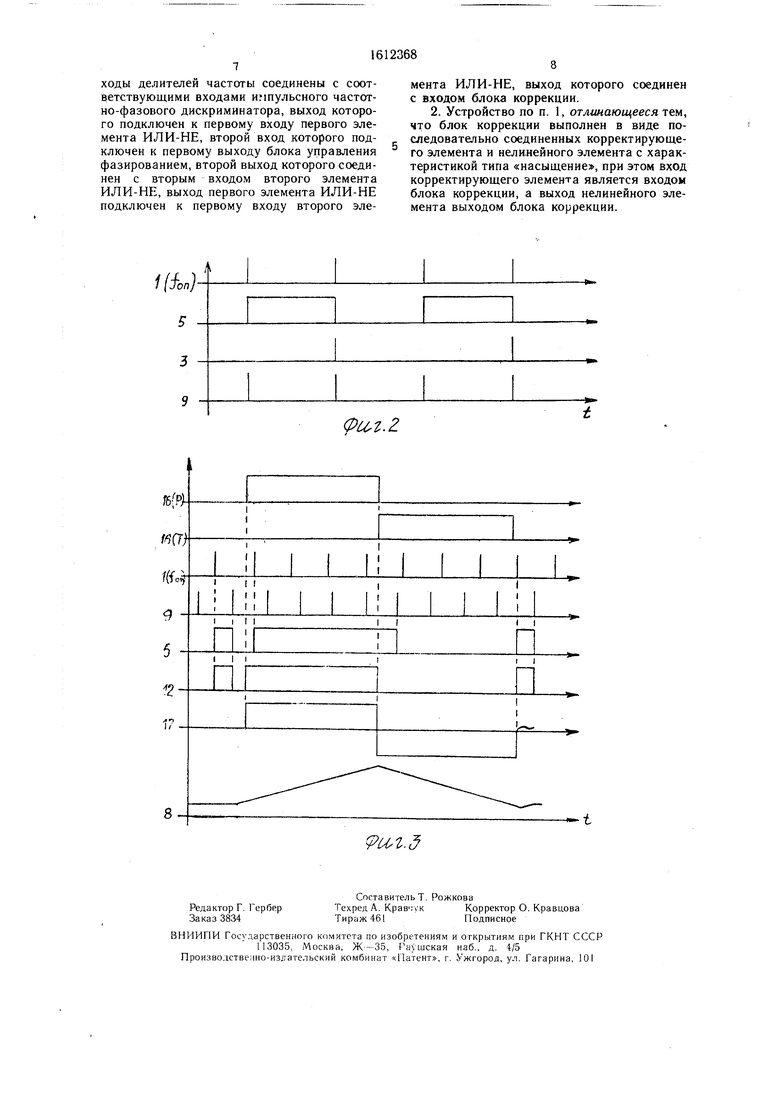
На фиг. 1 приведена блок-схема устройства; на фиг. 2 и 3 - временные диаграммы работы кольца фазовой автоподстройки частоты в фазирующем регуляторе, где цифры соответствуют элементам схемы.
Устройство содержит генератор 1 опорной частоты вращения, к выходу которого подключен первый вход управляемого ключа 2, второй вход которого соединен с входом первого делителя 3 частоты на два, второй делитель 4 частоты на два, вход которого подключен к выходу генератора 1 опорной частоты, импульсный частотно-фазовый дискриминатор 5, входы которого соединены с соответствующими выходами делителей 3 и 4 частоты, последовательно включенные элемент 6 коррекции, нелинейный элемент 7 с характеристикой типа «насыщение, интегратор 8 и управляемый генератор 9, выход которого подключен к второму входу управляемого ключа 2, а также генератор 10 опорной частоты фазирования, первый 11 и второй 12 элементы ИЛИ-НЕ, блок 13 фазовой автоподстройки частоты вращения вала с импульсными датчиками частоты вращения 14 и углового положения 15 и блок 16 управления фазированием, элемент 6 коррекции и нелинейный элемент 7 объединены в блок 17 коррекции, при этом вход ген ёратора 10 опорной частоты фазирования подключен к выходу генератора 1 опорной частоты вращения и к первому входу блока 16 управления фазированием, третий вход которого подключен к выходу генератора 10 опорной частоты фазирования, второй и четвертый входы соединены соответственно с выходами датчика 14 частоты вращения и датчика 15 углового положения, первый выход (Р) блока 16 управления фазированием подключен к второму входу первого элемента ИЛИ-НЕ 11, подключенного первым входом к выходу частотно-фазового дискриминатора 5, а выходом - к первому входу второго элемента ИЛИ-НЕ; 12, подключенного вторым входом к второму выходу (Т) блока 16 управления фазированием, а выходом к входу блока 17 коррекции, третий выход (Ф) блока 16 управления фазированием подключен к управляющему входу управляемого ключа 2, выход которого соединен с входом блока 13 фазовой автоподстройки частоты вращения вала.
Элемент 6 коррекции блока 17 коррекции служит для обеспечения устойчивости
работы кольца фазовой автоподстройки частоты управляемого генератора 9 и может быть выполнен в виде пропорционально- дифференциального регулятора. Это может быть, например, операционный усилитель с частотно-зависимой обратной связью или другой четырехполюсник, имеющий передаточную функцию вида
10
ивых ИвГ
К| + К2Р,
где Ki и К2 - коэффициенты передачи пропорциональной и дифференциальной составляющих соответственно; Р - оператор Лапласа.
5 Нелинейный элемент 7 блока 17 коррекции служит для ограничения выходного сигнала элемента 6 коррекции и может быть выполнен в виде лйгнейного усилителя, в котором насыщение определяется насыщением операционного усилителя.
0 Интегратор 8 служит для формирования линейно-изменяющегося напряжения на входе управляемого генератора 9 при наличии , сигналов разгона (Р) или торможения (Т) кольца (фазовой автоподстройки частоты управляемого генератора 9.
Блок 16 управления фазированием служит для формирования управляющих сигналов кольцом фазовой автоподстройки частоты (Р), (Т) и управляемым ключом 2 (Ф) в зависимости от фазового рассогласования
0 импульсов с выхода генератора 10 опорной частоты фазирования (Fon) и датчика 15 углового положения ротора (Foe).
Логические элементы ИЛИ-НЕ 11 и 12 реализуют логическую функцию (Aqp+P) Т, где Дф - выходной сигнал дискримина5 тора 5, и служат для блокировки выходного сигнала дискриминатора 5, т. е. для размыкания кольца фазовой автоподстройки частоты с целью формирования линейно изменяющейся частоты на выходе управляющего генератора 9 в режиме фазирования.
0 Устройство работает следующим образом.
При разгоне электродвигателя до синхронной частоты вращения, управляющие сигналы с блока 16 управления фазировад нием (РТФ) отсутствуют.
При этом на вход блока 13 фазовой автоподстройки частоты вращения поступает выходной сигнал генератора 1 опорной частоты через управляющий ключ 2, определяя разгон электродвигателя до синхронной скоQ рости. В это же время на выходе управляемого генератора 9 частота следования импульсов повышается до тех пор, пока не сравняется с частотой fcn с выхода генератора 1 опорной частоты. При вхождении импульсного частотно-фазового дискримина5 тора 5 в пропорциональный режим работы импульсы на его вводах в установив- щемся режиме оказываются сдвинутыми на п рад, а импульсы на входах делителей
частоты на два не имеют фазового сдвига (фиг. 2), что позволяет исключить скачок фазовой ошибкн на л в кольце фазовой автоподстройки частоты вращения при переходе в режим фазирования.
После синхронизации электропривода в блоке 16 управления фазированием определяется фазовое рассогласование импульсов Fon и Foe с выходов генератора 10 опорной частоты фазирования и 15 углового положения соответственно. При наличии фазового рассогласования, превышающего зону нечувствительности, устанавливается режим фазирования. На управляющий вход управляемого ключа 2 поступает сигнал Ф с блока 16 управления фазированием и иа вход блока 13 фазовой автоподстройки частоты вращения начинает поступать частота с управляемого генератора 9. Одновременно на первом выходе блока 16 управления фазированием появляется сигнал разгона Р, обеспечивающий линейное нарастание выходного сигнала интегратора 8 и частоты управляемого генератора 9 по закону fyr fon-j-Kt, где К - добротность разомкнутого кольца фазовой автоподстройки частоты вращения управляемого генератора 9, t О в момент начала фазирования.
Добротность К выбирается меньше добротности блока 13 фазовой автоподстройки частоты вращения, чтобы обеспечить обработку начального фазового рассогласования без выхода блока 13 в режим насыщения.
Режим разгона электропривода с постоянным ускорением продолжается до тех пор, пока начальное фазовое рассогласование не будет отработано на половину. В этот момент сигнал разгона Р становится равным О и появляется управляющий сигнал торможения Т, что соответствует изменению направления интегрирования интегратора 8.
Частота выходного сигнала управляемого генератора 9 изменяется при этом по закону fyr f(tp)-K(t-tp}, где i(tp) - значение, достигнутое частотой управляемого генератора 9 в процессе разгона электропривода в момент окончания разгона tp.
Окончание процесса фазирования определяется моментом достижения нулевого фазового рассогласования импульсов частот Fon и FOC, т. е. при синфазном вращении электропривода. При этом выходные сигналы блока 16 управления фазированием становятся- равными О, на вход блока 3 фазовой автоподстройки частоты вращения через управляемый ключ 2 начинает поступать чар- тота fon с генератора 1 опорной частоты вращения.
В процессе фазирования изменение управляющих сигналов на первом и втором выходах блока 16 управления фазированием приводит к скачкам напряжения на входе элемента 16 коррекции, дифференцирующие свойства которого определяют выбросы напряжения на его выходе. Введение нели0
5
0
5
0
5
0
5
0
.
нейного элемента У позволяет устранить выбросы напряжения на входе интегратора 8, определяющие большой темп нарастания частоты на выходе управляемого генератора 9, и устранить переходы блока 13 фазовой автоподстройки частоты вращения в режим насыщения, приводящие к нарущению алгоритме фазирования и, следовательно, к ухудшению динамики процесса фазирования.
С помощью логических элементов ИЛИ- НЕ обеспечивается прохождение сигналов Р и Т на вход блока 17 коррекции практически без задержки (фиг. 3), ухудшающей динамику кольца фазовой автоподстройки частоты и обуславливающей отличие времени разгона и торможения. В результате отсутствия задержки по управляющим сигналам улучшается динамика процесса фазирования.
Таким образом, устройство обеспечивает улучшение динамических характеристик электропривода в режиме фазирования за счет устранения фазового сдвига импульсных последовательностей fon и fyr, устранения задержки в прохождении сигналов Р и Т на вход блока коррекции и устранения выбросов- напряжения на входе интегратора, обуславливающих большой темп нарастания.
Формула изобретения
Устройство для согласования углового положения синхронно-вращающихся валов электродвигататей постоянного тока, содержащее последовательно соединенные генератор опорной частоты вращения, управляемый ключ и блок фазовой автоподстройки частоты с импульсными датчиками частоты и углового положения, а также генератор опорной частоты фазирования, вход которого подключен к выходу генератора опорной частоты вращения, блок управления фазированием, первый вход которого соединен с выходом генератора опорной частоты вращения, второй и четвертый входы подключены соответственно к выходам импульсных датчиков частоты и углового положения, третий вход соединен с выходом генератора опорной частоты фазирования, а третий выход подключен к управляющему входу управляемого ключа, импульсный частотно- фазовый дискриминатор и последовательно включенные блок коррекции, интегратор и управляемый генератор, выходом соединенный с вторым входом управляемого ключа, отличающееся тем, что, с целью улучшения динамических характеристик устройства в режиме фазирования, в него введены два делителя частоты и два элемента ИЛИ-НЕ, вход первого делителя частоты подключен к выходу управляемого генератора, вход второго делителя частоты подключен к выходу генератора опорной частоты вращения, выходы делителей частоты соединены с соответствующими входами импульсного частотно-фазового дискриминатора, выход которого подключен к первому входу первого элемента ИЛИ-НЕ, второй вход которого подключен к первому выходу блока управления фазированием, второй выход которого соединен с вторым входом второго элемента ИЛИ-НЕ, выход первого элемента ИЛИ-НЕ подключен к первому входу второго элемента ИЛИ-НЕ, выход которого соединен с входом блока коррекции.
2. Устройство по п. 1, отлинающееся тем, что блок коррекции выполнен в виде последовательно соединенных корректирующего элемента н нелинейного элемента с характеристикой типа «насыщение, при этом вход корректирующего элемента является входом блока коррекции, а выход нелинейного элемента выходом блока коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| Синтезатор частот | 1984 |
|
SU1293841A1 |
Изобретение относится к электротехнике, а именно к устройствам автоматического фазирования синхронизированных электроприводов с фазовой автоподстройкой частоты вращения по опорному импульсному сигналу, и может быть использовано в системах записи и воспроизведения информации. Цель изобретения - улучшение динамических характеристик устройства в режиме фазирования - достигается путем устранения фазового сдвига импульсных последовательностей Fоп и Fуг. устранения задержки в прохождении сигналов на разгон и торможение на вход блока 17 коррекции и устранения выбросов напряжения на входе интегратора 8. Указанный алгоритм работы устройства обеспечивается введением делителей 3, 4 частоты и элементов ИЛИ-НЕ 11, 12. 1 з.п. ф-лы, 3 ил.
Фи.г.г
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей | 1980 |
|
SU902189A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
