/ ./7
2J
(Л
СП
о со
N5 N5
.х
жит основание 4, бункер 1, в котором установлен с возможностью качания питатель, выполненный в виде ножа 8, механизм ориентации, выполненный в виде подпружиненного стержня 17 с выемкой 18 на рабочей поверхности, установленного с возможностью возвратно-поступательного перемещения вдоль наклонного лотка 14, соединенного с отводяидим каналом, и взаимодействия с приводом питателя посредством рычажного механизма, ворошители 12, установленные оппозитно питателю параллельно последнему с возможностью качания
и кинематически связанные с приводом питателя. Рабочая поверхность ворошителей выполнена в виде клина. Питатель поштучно подает детали в наклонный лоток 14. Если деталь поступает цапфой, то она заходит внутрь выемки 18 стержня 17, при этом второй ее конец проваливается. Деталь, переворачиваясь, поступает этим концом в от- водяш,ий канал. При попадании детали в наклонный лоток цапфой сзади, она, не переворачиваясь, поступает в отводящий канал. 2 з.п. ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗОЧНО-ОРИЕНТИРУЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2065352C1 |
| Загрузочное устройство | 1986 |
|
SU1373523A1 |
| Устройство для автоматической зарядки ориентированными крепежными деталями магазинов ручного инструмента | 1978 |
|
SU753597A2 |
| Загрузочное устройство для длинномерных заготовок | 1981 |
|
SU973456A1 |
| Загрузочное устройство | 1982 |
|
SU1077757A1 |
| Устройство для автоматической зарядки ориентированными крепежными деталями магазинов ручного инструмента | 1977 |
|
SU701763A2 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
| УСТРОЙСТВО ДЛЯ ВТОРИЧНОЙ ОРИЕНТАЦИИ СТУПЕНЧАТЫХ СТЕРЖНЕЙ | 2008 |
|
RU2381886C1 |
| Устройство для ориентации плоских деталей | 1978 |
|
SU785017A1 |
| Загрузочное устройство | 1985 |
|
SU1349961A2 |
Изобретение относится к машиностроению, а именно к автоматизации производственных процессов, и наиболее эффективно может быть использовано при загрузке металлообрабатывающих станков и автоматических линий. Целью изобретения является упрощение конструкции. Устройство содержит основание 4, бункер 1, в котором установлен с возможностью качания питатель, выполненный в виде ножа 8, механизм ориентации, выполненный в виде подпружиненного стержня 17 с выемкой 18 на рабочей поверхности, установленного с возможностью возвратно-поступательного перемещения вдоль наклонного лотка 14, соединенного с отводящим каналом, и взаимодействия с приводом питателя посредством рычажного механизма, ворошители 12, установленные оппозитно питателю параллельно последнему с возможностью качания и кинематически связанные с приводом питателя. Рабочая поверхность ворошителей выполнена в виде клина. Питатель поштучно подает детали в наклонный лоток 14. Если деталь поступает цапфой, то она заходит во внутрь выемки 18 стержня 17, при этом второй ее конец проваливается. Деталь, переворачиваясь, поступает этим концом в отводящий канал. При попадании детали в наклонный лоток цапфой сзади она, не переворачиваясь, поступает в отводящий канал. 2 з.п.ф-лы, 4 ил.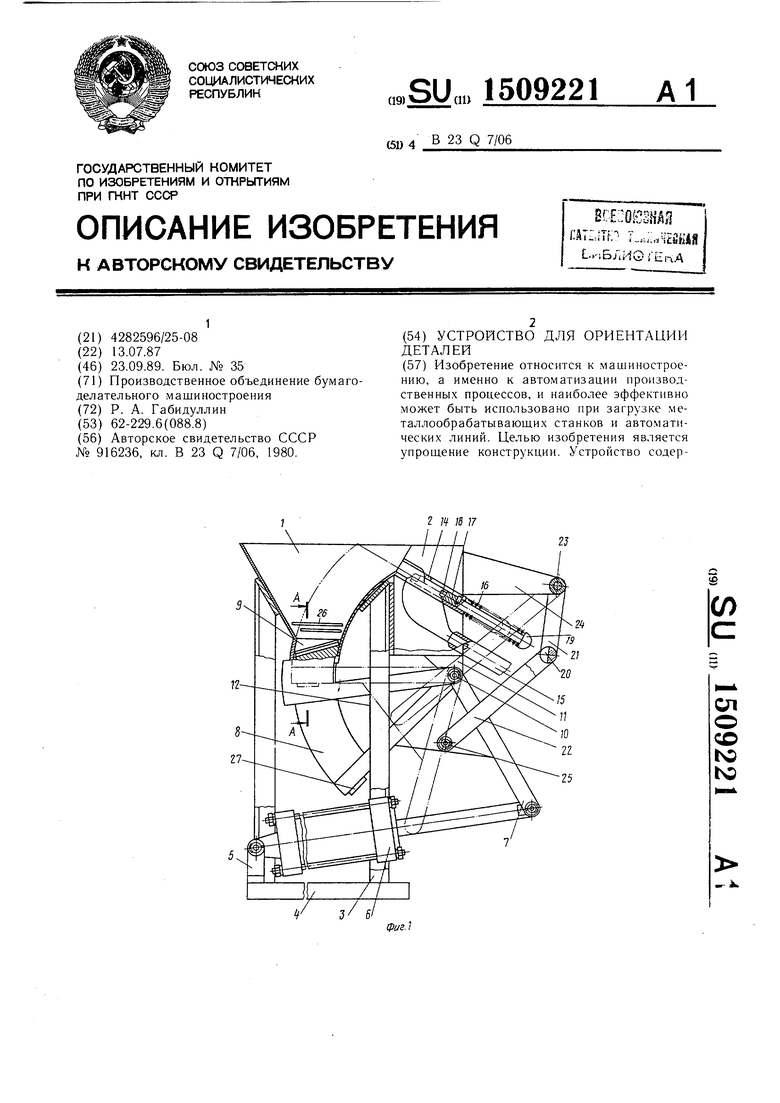
Изобретение относится к машиностроению, а именно к автоматизации производственных процессов, и наиболее эффективно может быть использовано при загрузке металлообрабатывающих станков и автоматических линий.
Целью изобретения является упрощение конструкции за счет ликвидации привода механизма ориентации.
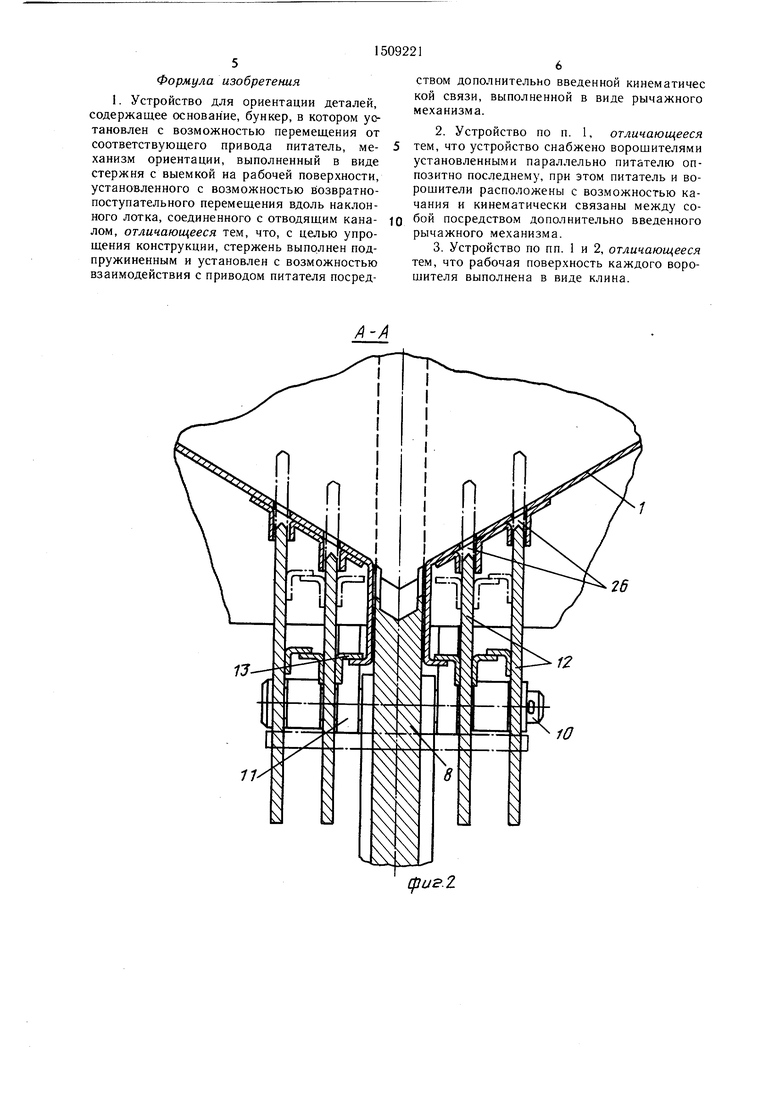
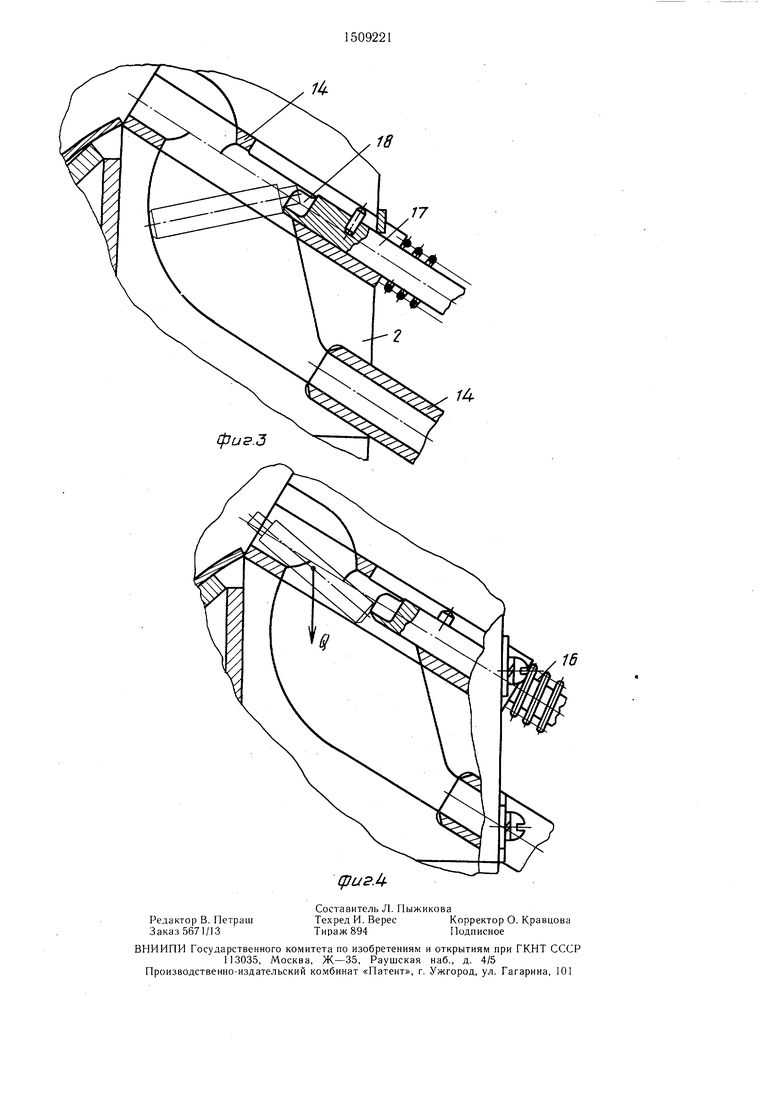
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - схема ориентации детали при движении цапфой вперед; на фиг. 4 - то же, при движении цапфой сзади.
Устройство содержит бункер I и корпус 2, стыкующиеся между собой и смонтированные на стойках 3 и основании 4. Кроме того, к основанию 4 на стойке 5 шарнирно прикреплен хвостовик привода осевого действия - пневмоцилиндра 6. Шток пневмоци- линдра 6 щарнирно соединен с концом Г-об- разного рычага 7 питателя. Питатель представляет собой дугообразный нож 8 и проходит внутрь бункера 1 через направляющий канал 9, причем рабочая поверхность ножа 8 выполнена в виде призмы посередине и с буртами по краям. Питатель шарнирно прикреплен на оси 10 к кронштейну 11 корпуса 2. Кроме того, на этой же оси 10 качаются ворошители 12, представляющие собой Г-образные рычаги с буртом 13 для ограничения движения. Внутри корпуса 2 смонтированы наклонньЕЙ лоток 14 и отводящий канал 15.
Внутри наклонного лотка 14 перемещается механизм ориентации, выполненный в виде подпружиненного пружиной 16 стержня 17 с выемкой 18 на торце. Посредством сферической головки 19 стержень взаимодействует со скощенной поверхностью средней оси 20 рычажной системы. Рычажная система выполнена в виде четырех попарно закрепленных на Трех осях пластинчатых рычагов 21 и 22, одна крайняя ось 23 которых закреплена на неподвижном кронштейне 24, а другая ось 25 - на рычаге 7 питателя.
Ворошители 12 расположены параллельно ножу 8 питателя и проходят через каналы
26бункера 1 на расстоянии от ножа,незначительно превышающем диаметр детали. На нижнем конце ножа 8 прикреплена планка
27для воздействия на ворошители 12. Устройство работает следующим образом.
При выдвинутом положении штока пневмоцилиндра 6 нож 8 утоплен в направляющем канале 9 бункера 1 для западания в нее детали. При втягивании щтока внутрь пневмоцилиндра 6 нож 8 поднимается, увлекая за собой запавшие в него заготовки, и в крайнем верхнем положении переправляет переднюю из них в наклонный лоток 14 корпуса 2, где заготовку уже встречает стержень 17. При подходе в верхнее положение нож 8, планкой 27 приподнимает ворощите- ли 12. При обратном ходе щтока пневмоцилиндра 6 опускается нож 8, увлекая за собой ворошители 12, при этом стержень под воздействием пружины 16 при отводе средней оси 20 рычажной системы начинает сопровождать деталь.
При попадании дета ли в наклонный лоток 14 цапфой вперед последняя заходит внутрь выемки 18 стержня 17, при этом второй конец детали проваливается и, переворачиваясь, деталь поступает этим концом в отводящий канал 15.
При попадании заготовки в наклонный лоток 14 цапфой сзади другой конец заго- товки не может зайти в выемку 18 стержня, и, когда центр тяжести Q переходит за кромку, заготовка, не переворачиваясь, проваливается и поступает в отводящий канал 15 цапфой сзади.
При втягивании щтока пневмоцилиндра 6 стержень 17 под действием оси 20 передви гается внутрь наклонного лотка 14 навстречу новой заготовке.
Формула изобретения
ством дополнительно введенной кинематичес кой связи, выполненной в виде рычажного механизма.
.Z
/
фигЛ
17
| Авторское свидетельство СССР № 916236, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
