Л /г 20
5 J5
-II
/4
ел
о со to
со
О
Изобретение относится к абразивной обработке и может быть использовано для обработки асферических поверхностей оптических деталей.
Целью изобретения является повышение точ 1ости обработки за счет самоустановки инструментов.
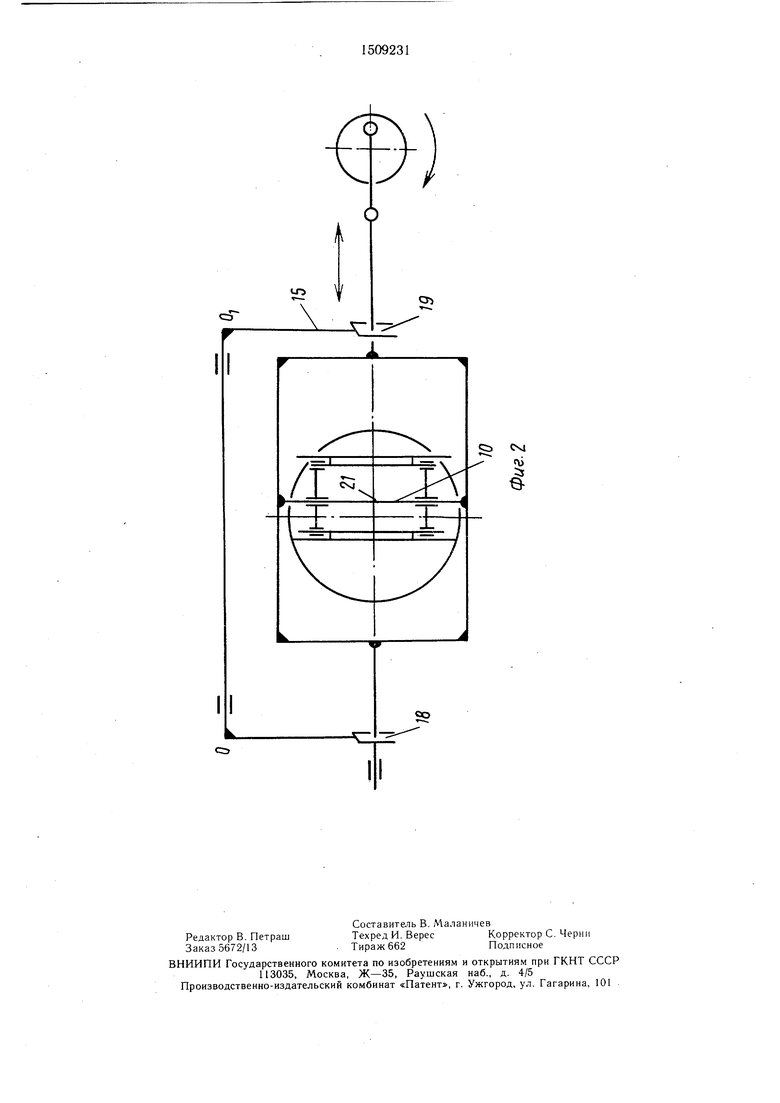
На фиг. 1 представлена кинематическая схема станка; на фиг. 2 - то же, вид сверху.
Обрабатываемая деталь 1 закреплена на планшайбе 2, установленной на шпинделе 3. Обрабатываюш.ие ножевые инструменты 4 и 5 закреплены на сторонах 6 и 7 параллело- граммного механизма, две другие стороны 8 и 9 которого по серединам шарнирно соединены между собой перемычкой 10.
Механизм плоского возвратно-поступательного движения выполнен из двух соосных валиков И и 12, жестко связанных с перемычкой 10 и перпендикулярных плоскости этой перемычки, двух кронштейнов 13 и 14 и рамки 15. Кронштейны 13 и 14 выполнены с прямоугольными пазами 16 и 17, ширина которых равна диаметрам валиков 11 и 12. Оси пазов 16 и 17 лежат в одной плоскости, параллельной оси шпинделя 3, или в частном случае плоскость, проходяш.ая через оси пазов 16 и 17, совмеш.ена с осью шпинделя 3.
Рамка 15 установлена с возможностью поворота вокруг оси OOi, параллельной плоскости, проходящей через оси пазов 16 и 17, и лежащей в плоскости, перпендикулярной оси щпинделя 3. Рамка 15 выполнена с прямоугольными пазами 18 и 19, ширина которых равна диаметрам валиков 11 и 12. Оси пазов 18 и 19 лежат в одной плоскости, параллельной оси OOi поворота рамки 15 или проходящей через эту ось.
Валики 11 и 12 помещены в пазы 16 и 17 кронщтейнов 13 и 14, а ткже в пазы 18 и 19 рамки 15. Валик 12 соединен с приводом 20, выполненным, например, в виде кривошип но-щатунного механизма.
Валики 11 и 12 установлены так, что проекция 21 оси валиков 11 и 12 на плоскость перемычки 10 расположена посередине между проекциями параллельных сторон 8 и 9 параллелограмма, соединенных перемычкой 10.
Станок работает следующим образом.
Обрабатываемую деталь 1 устанавливают на шпинделе 3 с помощью планшайбы 2. .Ножевые инструменты 4 и 5 закрепляют на вертикальных сторонах 7 и 6 параллело- граммного механизма и устанавливают на обрабатываемую поверхность детали 1. Благодаря возможности поворота параллело- граммного механизма вокруг оси валиков
II и 12 ножевые инструменты самоустанавливаются на обрабатываемой поверхности. Шпинделю 3 сообщают вращательное движение. Приводом 20 через механизм плоского возвратно-поступательного движения, состоящий из валиков 1 1 и 12, жестко связанных с перемычкой 10 параллелограм- миого мехапизма, крошптейнов 13 и 14 с пазами 16 и 17 и рамки 15 с пазами 18 и 19,
„ приводят в движение параллелограммный .механизм с ножевы.ми инструментами 4 и 5. В процессе перемещения инструменты 4 и 5 постоянно прилегают к обрабатываемой поверхности, при этом плоскости ножевых инструментов остаются параллельными оси шпинделя 3, что обеспечивает получение параболических поверхностей.
В предлагаемом станке ножевые инструменты самоустанавливаются на обрабатываемой поверхности, что устраняет ограничение точности обработки параболической поверхности точностью отдельных узлов станка.
Формула изобретения
Станок для обработки параболических 5 поверхностей оптических деталей, содержащий шпиндель, параллелограммный механизм, середины двух параллельных сторон которого щарнирно соединены перемычкой, закрепленной на механизме плоского возвратно-поступательного движения с привое дом, и ножевые инструменты, закрепленные на двух других сторонах параллелограммно- го механизма, отличающийся тем, что, с целью повышения точности обработки за счет самоустановки инструментов, механизм плоского возвратно-поступательного движения 5 выполнен в виде двух соосных валиков. Двух кронштейнов с прямоугольными пазами, ширина которых равна диаметрам валиков, и рамки с двумя прямоугольными пазами, ширина которых равна диаметрам ва- 0 ликов, при этом соосные валики жестко установлены перпендикулярно перемычке, соединяющей середины сторон параллелограмма, а проекция оси валиков в плоскости перемычки расположена посередине между проекциями параллельных сторон па- 5 раллелограмма, соединенных пере.мычкой, валики установлены в прямоугольные пазы кронщтейнов и рамок, оси пазов кронштейнов расположены в плоскости, параллельной оси щпинделя, рамка установлена с возможностью поворота вокруг оси, лежащей на пересечении двух плоскостей, одна из которых параллельна плоскости, проходящей через оси пазов кронштейнов, а другая перпендикулярна оси шпинделя, при этом один из валиков соединен с приводом.
0
Ф)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки параболических поверхностей оптических деталей | 1989 |
|
SU1811473A3 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ И ПОЛИРОВАНИЯ И ВОГНУТЫХ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU305041A1 |
| УНИВЕРСАЛЬНЫЙ БЫТОВОЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1993 |
|
RU2060878C1 |
| Станок для обработки параболических поверхностей | 1990 |
|
SU1705035A1 |
| Устройство для очистки наружной поверхности цилиндрической детали | 1987 |
|
SU1447461A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Устройство для сборки резьбовых соединений | 1988 |
|
SU1512749A1 |
| Секция пропашного культиватора | 1988 |
|
SU1575961A1 |
| Станок для обезжиривания шкурок | 1989 |
|
SU1666540A1 |
Изобретение относится к абразивной обработке и может быть использовано при шлифовании и полировании асферических поверхностей оптических деталей. Изобретение позволяет повысить точность обработки параболических поверхностей. Перемычкой 10, шарнирно соединяющей середины двух параллельных сторон параллелограммного механизма 8 и 9, жестко соединены два соосных валика 11 и 12. Валики 11 и 12 перемещаются в пазах кронштейнов 13 и 14 и рамки 15. Возможность поворота параллелограммного механизма вокруг оси соосных валиков обеспечивает самоустановку ножевых инструментов 4 и 5 на обрабатываемой поверхности. 2 ил.
Ci CS4
«Ъ
| Авторское свидетельство СССР № 1390940, кл | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
