СП
tsD vj
4 СО
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2001 |
|
RU2197368C2 |
| Шпильковерт | 1982 |
|
SU1065176A1 |
| УСТРОЙСТВО ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2006 |
|
RU2323077C2 |
| Устройство для сборки втулок цилиндров тяжелых дизелей | 1983 |
|
SU1184639A1 |
| Автомат для завинчивания шпилек | 1985 |
|
SU1355438A1 |
| СБОРКИ РЕГУЛЯТОРА НАТЯЖЕНИЯ ВЕРХНЕЙ НИТИ ШВЕЙНОЙ МАШИНЫ | 1972 |
|
SU352739A1 |
| КОМПЛЕКС СБОРКИ ШАТУННО-ПОРШНЕВОЙ ГРУППЫ | 2013 |
|
RU2548843C2 |
| Устройство для завинчивания крепежных деталей | 1974 |
|
SU626931A1 |
| Шпильковерт | 1989 |
|
SU1705061A1 |
| Устройство для завинчивания и запрессовки | 1989 |
|
SU1692800A1 |
Изобретение относится к машиностроению, автомобилестроению, тракторостроению и другим областям техники, где необходимо производить сборку корпусных деталей со шпильками. Цель изобретения - повышение надежности базирования. Устройство содержит шпильковерты 1 с подвижными вдоль оси сборки шпинделями 2, привод 3 осевого перемещения шпинделей, магазины 4 для шпилек, отсекатели, ловители 6, упоры 7 и приспособление 8 для установки базовой детали, например шатуна. На приспособлении 8 смонтированы подпружиненные установочные пальцы 9, опорная пята, двухкривошипный параллелограммный механизм 11 с плитой 12, подъем которой ограничен Г-образными упорами. Отсекатели 5 магазинов 4 выполнены в виде шарнирно установленных одноплечих рычагов с окном 17, стянутых пружиной 18. При этом рычаги расположены на осях 20. 0ловители 6 выполнены со сквозными пазами 21 и поджаты к шпинделям 2 пружинами 22. Шпиндели 2 удерживаются в исходном положении передней плитой подвижной рамки 23, на которой расположен шариковый зажим 25 и роликовый зажим 26. 6 ил.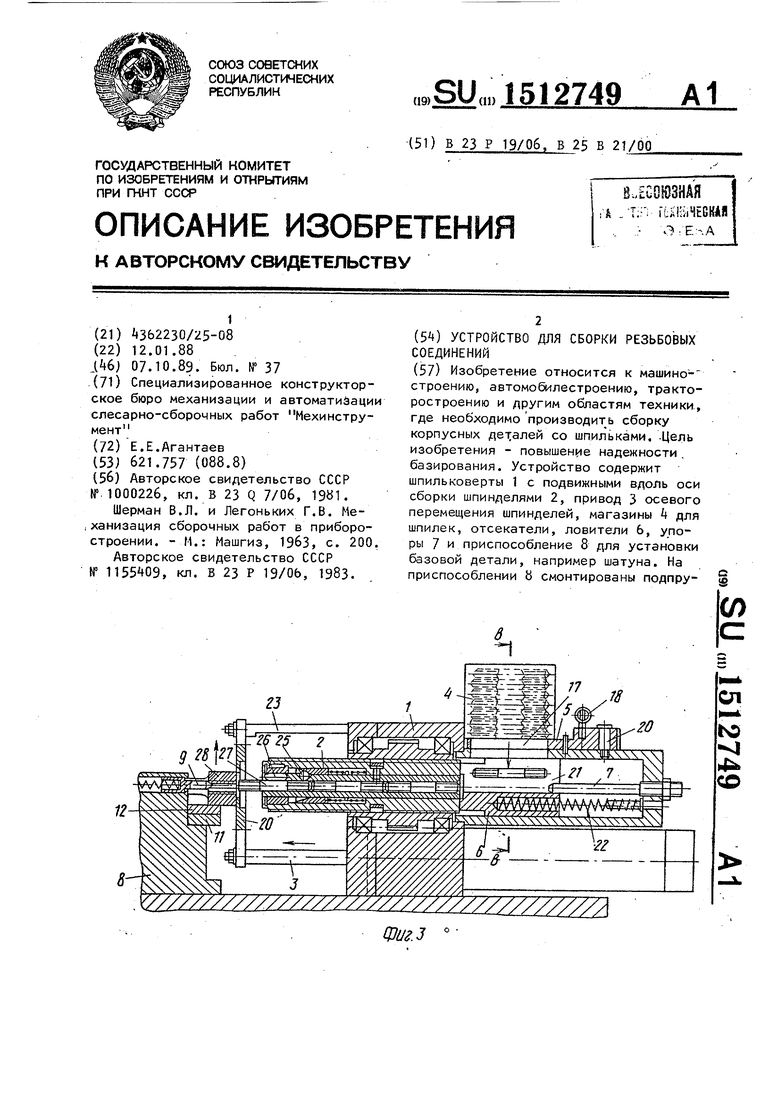
y.J
3 -151
жиненные установочные пальцы 9, опорная пята, двухкривошипный параллело- граммный механизм 11 с плитой 12, подъем которой ограничен Г-образными упорами. Отсекатёли 5 магазинов k выполнены в виде шарнирно установленных одноплечих рычагов с окном 17, стянутых пружиной 18. При этом рычаги
Изобретение относится к машиностроению, автомобилестроению, трак- . 15 торостроению и другим областям техники, где необходимо производить сборку корпусных деталей со шпильками.
Цель изобретения - повышение на- 20 дежности базирования корпусной детали -реализуется снабжением приспособления для установки базовой детали шаровой опорой, установленной в подвижной плите в точке, соответствующей 25 расположению центра тяжести базовой детали.
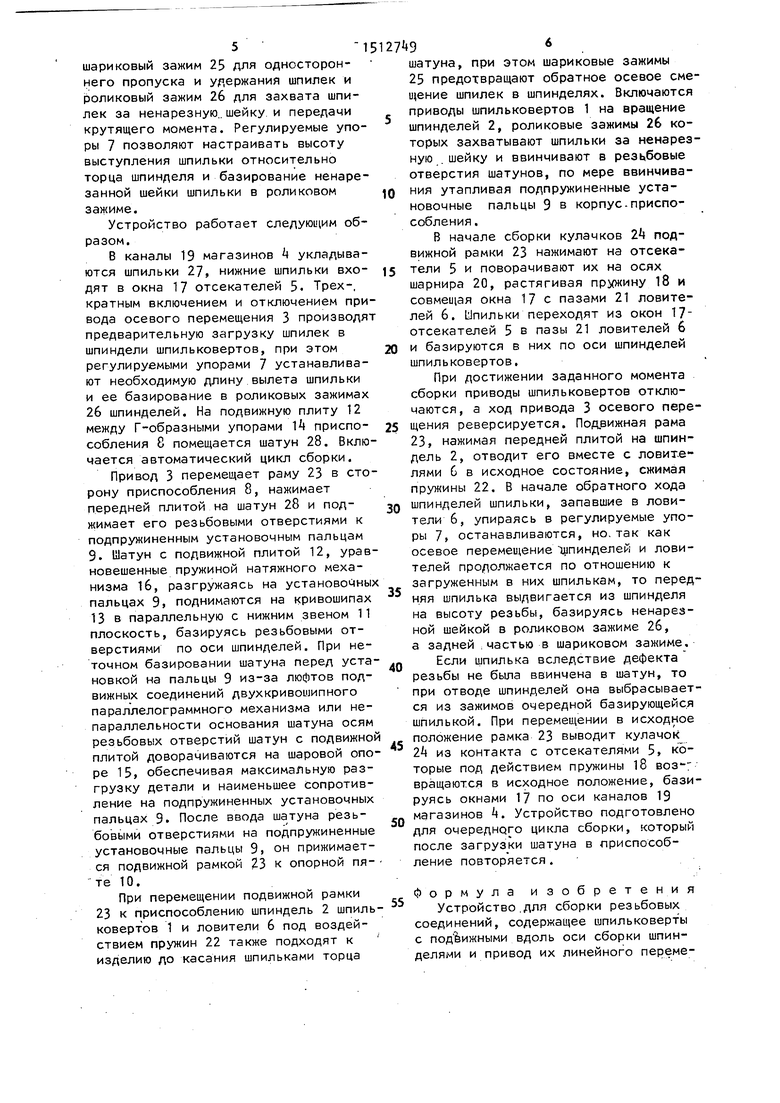
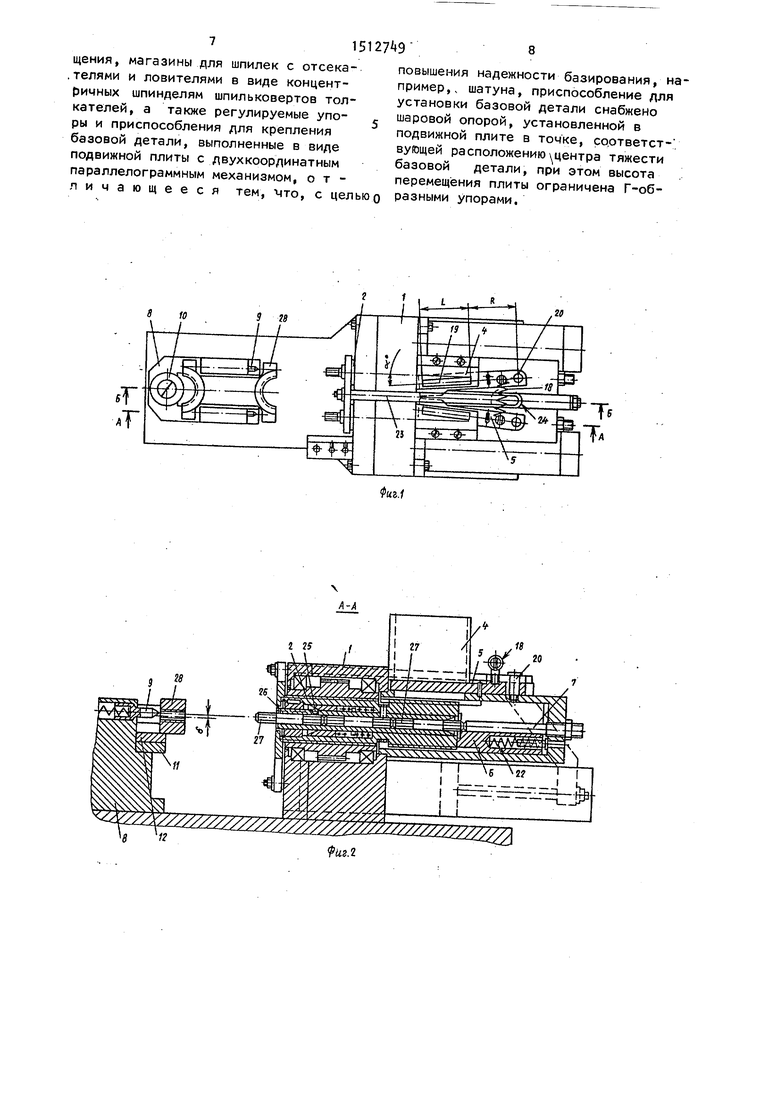
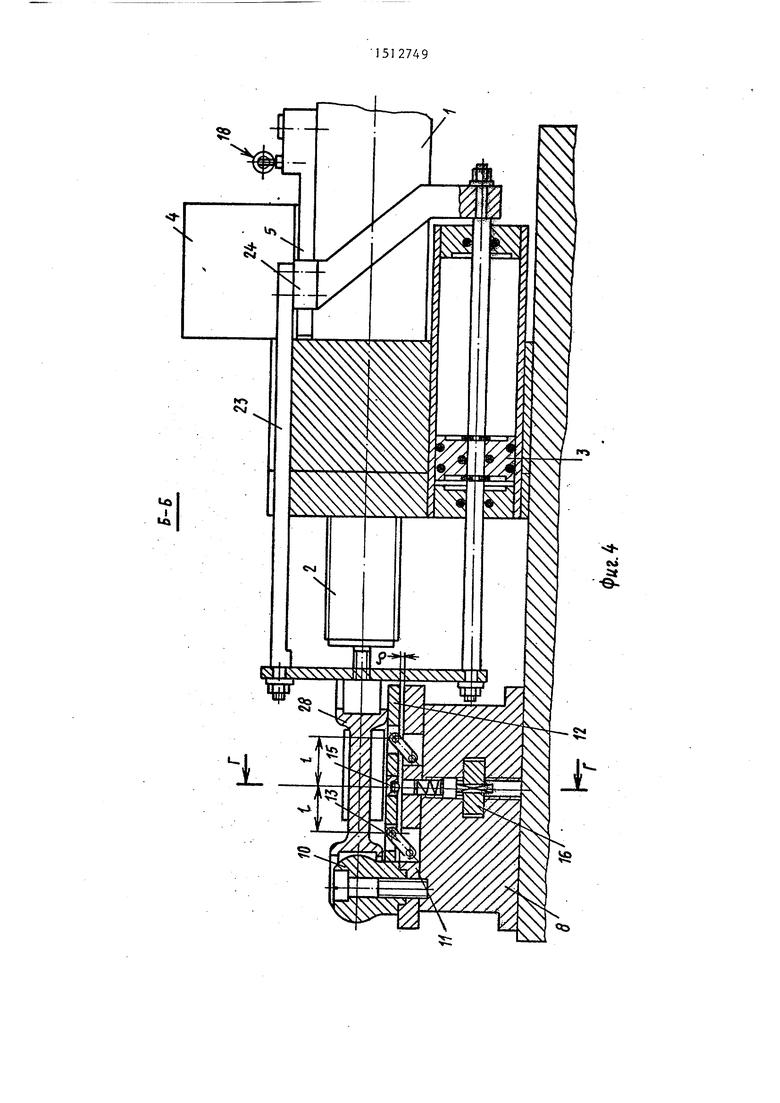
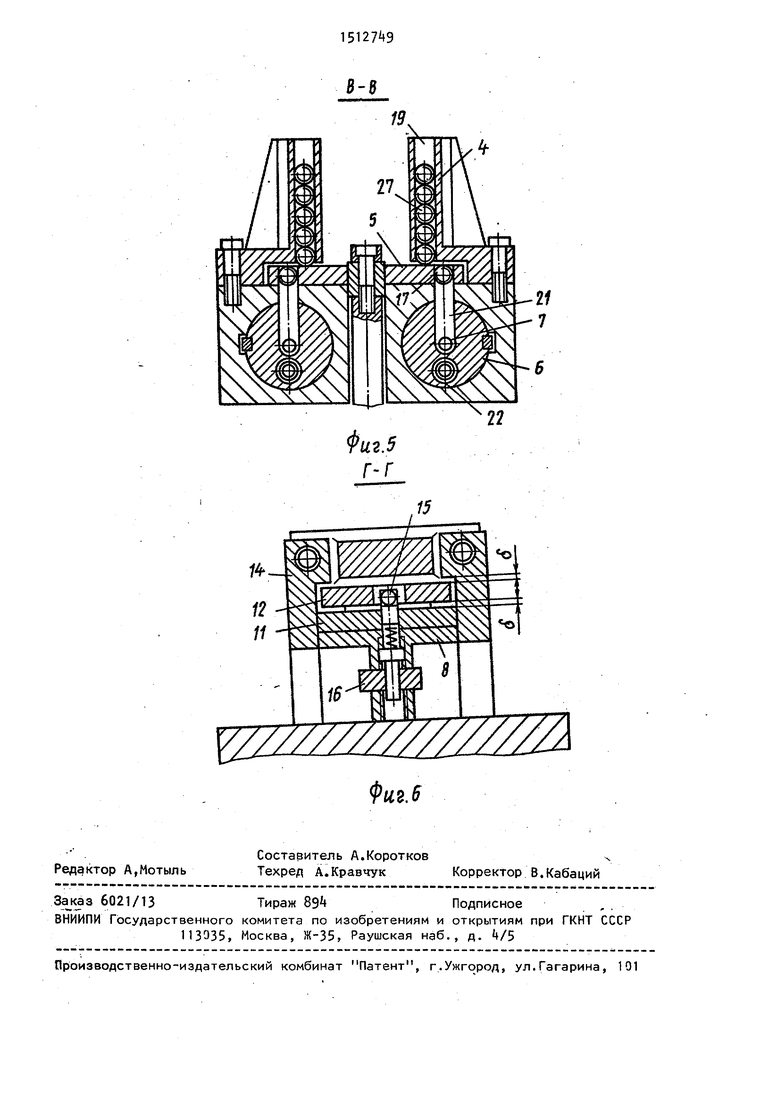
На фиг.1 показано устройство, об- щий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - устройство в момент 30 ориентации и установки детали; на фиг. - разрез Б-Б на фиг.1 (устройство, в момент фиксации детали и начала сборки); на фиг.5 - разрез В-В на фиг.З; на фиг.Ь - разрез Г-Г на 35 фиг.4.
Устройство содернит шпильковерты 1 с подвижными вдоль оси сборки шпинделями 2, привод 3 осевого перемещения шпинделей, магазины 4 для шпилек, от-40 секатели 5, ловители 6 для поштучно выданных шпилек, пропущенные в плунжерах по оси шпинделей регулируемые упоры 7, приспособления 8 для установки и фиксации шатунов.д5
На приспособлении b смонтированы подпружиненные установочные пальцы 9, выполненнь1е с минимальным зазором по внутреннему диаметру резьбовых отверстий шатуна, опорная пята 10, двух- ,кривошипный параллелограммный механизм, закрепленный нижним параллельным звеном 11 на корпусе приспособления. Подвижная плита 12, являющаяся верхним звеном параллелограммного меха55
низма, шарнирно связана кривошипами. 13 с нижним параллельным звеном 11 и ограничена по ходу между ней и . Г-образными упорами k приспособления
27494
расположены на осях 20. Ловители 6 выполнены со сквозными пазами 21 и поджаты к шпинделям 2 пружинами 22. Шпиндели 2 удерживаются в исходном положении передней плитой подвижной рамки 23, на которой расположен шариковый зажим 25 и роликовый за- шм 26. 6 ил.
8 в пределах максимального допуска (сРили 2tf) погрешности базирования шатунов. В подвижной плите 12 на ном расстоянии.(1) от осей кривошипов 13 установлена шаровая опора 15 поджатая пружиной натяжного механизма 16, настроенного примерно на сумму весов подвижной плиты и шатуна с учетом углов и сил трения в опорах и кривошипах. Соотношение размеров приспособления выполнено таким, что при уста.- новке шатуна резьбовыми отверстиями на подпружиненные установочные пальцы 9 центр тяжести детали находится на продолжении вертикальной оси шаровой опоры 15.
Отсекатёли 5 магазинов выполнены в виде шарнирно установленных одноплечих рычагов с окном 17 по форме шпильки и базированы в исходном положении под действием пружины 18 по оси канала 19 магазина . Для уменьшения углового хода отсекателя без увеличения конструкции устройства окно 17 расположено от оси шарнира 20 на расстоянии радиуса поворота (R), равного длине шпильки (L). Для устранения возможного провисания шпильки из отсекателя в ловитель ближний к оси шарнира 20 торец шпильки смещен относительно оси ловителя на величину половины диаметра (D) шпильки. Поэтому оптимальный угол поворота отсекателей определяется из размеров шпильки и равен d arcsinDu,fi72R или- о агсз1пГ)и„Л .Ьц .
Ловители 6 выполнены со сквЬзными радиальными пазами 21 для прохождения шпилек и поджаты к шпинделям 2 пружинами 22.
Шпиндели удерживаются в исходном положении передней плитой подвижной рамки 23, нижняя часть которой является штоком привода 3 а верхняя часть несет расположенный в плоское- : ти отсекателей 5 кулачок 24. В полости шпинделей шпильковертов размещен .
шариковый зажим 25 для одностороннего пропуска и уя.ержания шпилек и роликовый зажим 26 для захвата шпилек за ненарезную., шейку и передачи крутящего момента. Регулируемые упоры 7 позволяют настраивать высоту выступления шпильки относительно торца шпинделя и базирование ненарезанной шейки шпильки в роликовом зажиме.
Устройство работает следуюи;им образом.
В каналы 19 магазинов укладываются шпильки 27, нижние шпильки входят в окна 17 отсекателей 5. Трех-, кратным включением и отключением привода осевого перемещения 3 производят предварительную загрузку шпилек в шпиндели шпильковертов, при этом регулируемыми упорами 7 устанавливают необходимую длину вылета шпильки и ее базирование в роликовых зажимах 26 шпинделей. На подвижную плиту 12 между Г-образными упорами lA приспособления 8 помещается шатун 28. Включается автоматический цикл сборки.
Привод 3 перемещает раму 23 в сторону приспособления 8, нажимает передней плитой на шатун 28 и поджимает его резьбовыми отверстиями к подпружиненным установочным пальцам 9. Шатун с подвижной плитой 12, уравновешенные пружиной натяжного механизма 1б, разгружаясь на установочных пальцах 9, поднимаются на кривошипах 13 в параллельную с нижним звеном 11 плоскость, базируясь резьбовыми отверстиями по оси шпинделей. При неточном базировании шатуна перед установкой на пальцы 9 из-за люфтов подвижных соединений двухкривошипного параллелограммного механизма или непараллельности основания шатуна осям резьбовых отверстий шатун с подвижной плитой доворачиваются на шаровой опоре 15, обеспечивая максимальную разгрузку детали и наименьшее сопротивление на подпружиненных установочных пальцах 9. После ввода шатуна резь- бовь1ми отверстиями на подпружиненные установочные пальцы 9. он прижимается подвижной рамкой 23 к опорной пя- те 10.
При перемещении подвижной рамки 23 к приспособлению шпиндель 2 шпильковертов 1 и ловители 6 под воздействием пружин 22 также подходят к изделию до касания шпильками торца
шатуна, при этом шариковые зажимы 25 предотвращают обратное осевое смещение шпилек в шпинделях. Включаются приводы шпильковертов 1 на вращение шпинделей 2, роликовые зажимы 26 которых захватывают шпильки за ненарезную . шейку и ввинчивают в рез1 бовые отверстия шатунов, по мере ввинчива 0 ния утапливая подпружиненные установочные пальцы 9 в корпус.приспособления .
В начале сборки кулачков 2Ц подвижной рамки 23 нажимают на отсека15 тели 5 и поворачивают их на осях шарнира 20, растягивая пружину 18 и совмещая окна 17 с пазами 21 ловителей 6. Шпильки переходят из окон 17- отсекателей 5 в пазы 21 ловителей 6
20 и базируются в них по оси шпинделей шпильковертов.
При достижении заданного момента сборки приводы шпильковертов отключаются, а ход привода 3 осевого пере25 щения реверсируется. Под.вижная рама 23, нажимая передней плитой на шпиндель 2, отводит его вместе с ловителями б в исходное состояние, сжимая пружины 22. В начале обратного хода
30 шпинделей шпильки, запавшие в ловители 6, упираясь в регулируемые упоры 7, останавливаются, но, так как осевое перемещение гипинделей и ловителей продолжается по отношению к загруженным в них шпилькам, то передняя шпилька выдвигается из шпинделя на высоту резьбы, базируясь ненарезной шейкой в роликовом зажиме 26, а задней .частью в шариковом зажиме.
Если 1упилька вследствие дефекта резьбы не была ввинчена в шатун, то при отводе шпинделей она выбрасывается из зажимов очередной базирующейся шпилькой. При перемещении в исходное положение рамка 23 выводит кулачок 24 из контакта с отсекателями 5, которые под действием пружины 18 воз-г вращаются в исходное положение, базируясь окнами 17 по оси каналов 19 магазинов 4. Устройство подготовлено для очередного цикла сборки, который после загрузки шатуна в приспособление повторяется .
35
40
45
50
Формула изобретения
Устройство.для сборки резьбовых соединений, содержащее шпильковерты с под Ьижными вдоль оси сборки шпинделями и привод их линейного перемещения, магазины для шпилек с отсека- .гелями и ловителями в виде концентричных шпинделям шпильковертов толкателей, а также регулируемые упо- - ры и приспособления для крепления базовой детали, выполненные в виде подвижной плиты с двухкоординатным параллелограммным механизмом, отличающееся тем, VTO, с цельюо
повышения надежности базирования, например,, шатуна, приспособление для установки базовой детали снабжено шаровой опорой, установленной в подвижной плите в точке, сортветст- . вующей расположению центра тяжести базовой детали, при этом высота перемещения плиты ограничена Г-об- разными упорами.
го
cs
