Изобретение относится к приборостроению, в частности к способам измерения массы груза автомобиля, и может быть использовано в штатных приборах автотранспортных средств для контроля массы груза в кузове автомобиля и учета выполненной им работы.
Цель изобретения - повышение точности измерения.
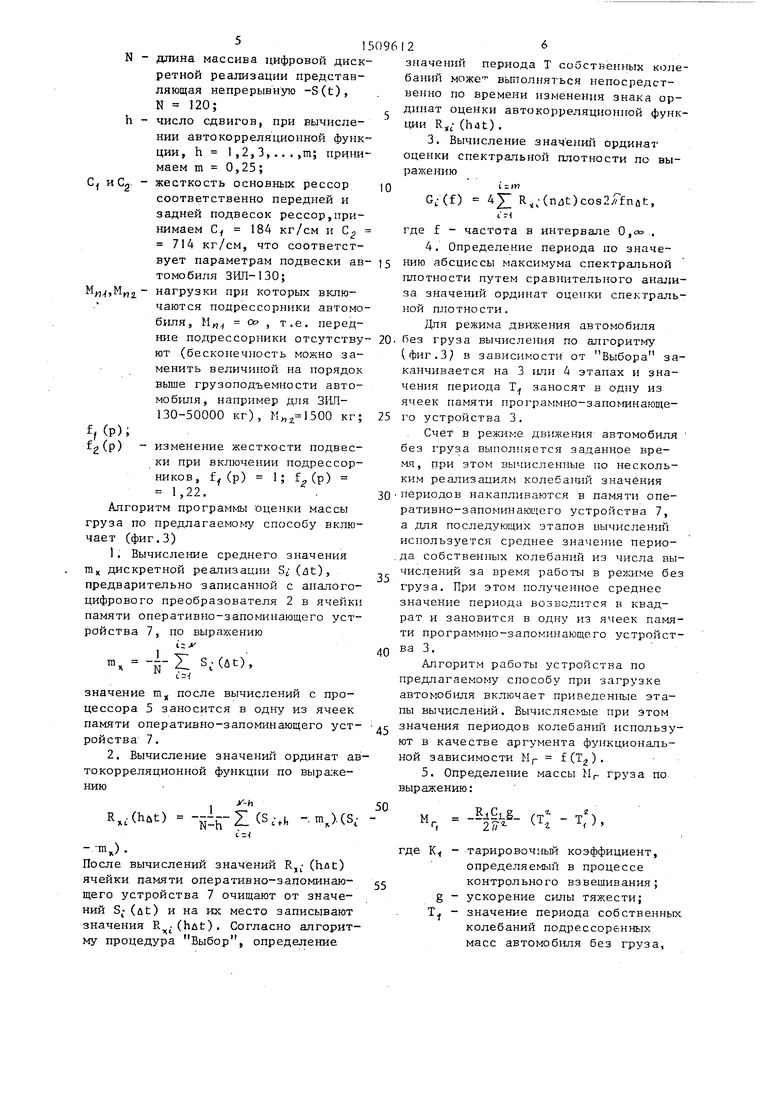
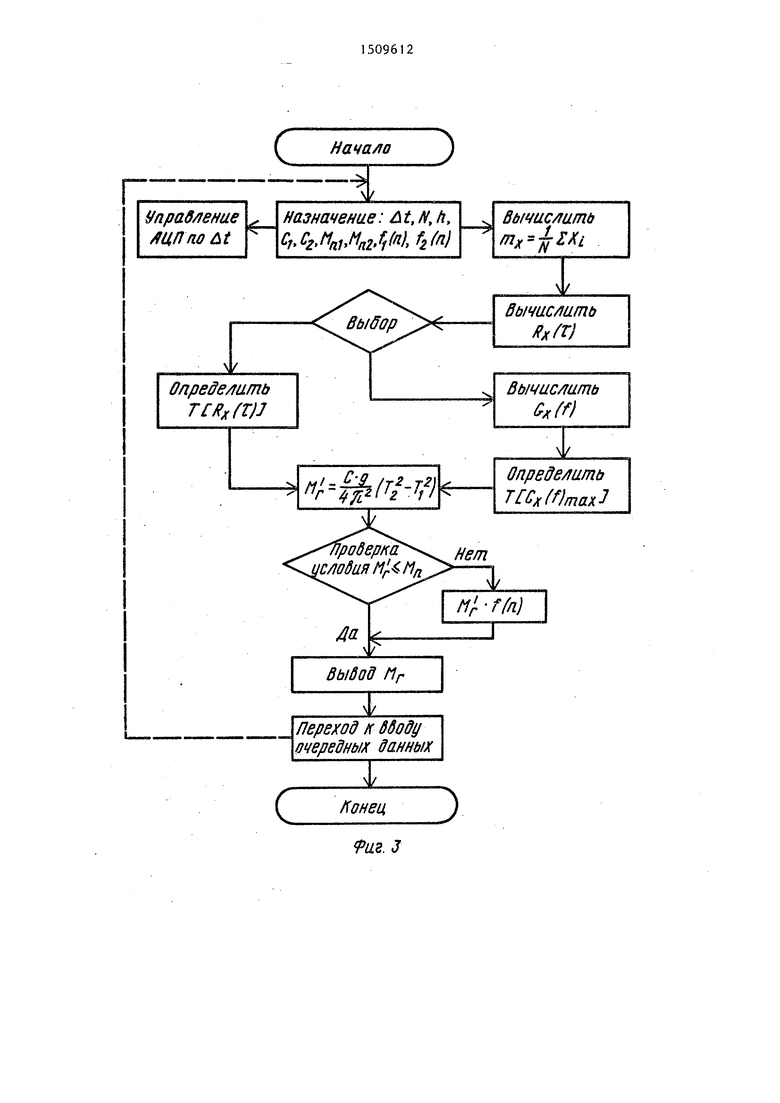
На фиг.1 представлен автомобиль с подрессоренной массой М и реализации S(t) ее колебаний, зарегисттирован- ных вибродатчиком, вид сзади; на фиг.2 - блок-схема вычислительной системы для обработки реализации S(t); на фиг.З - алгоритм программы обработки реализации S(t); на фиг.4
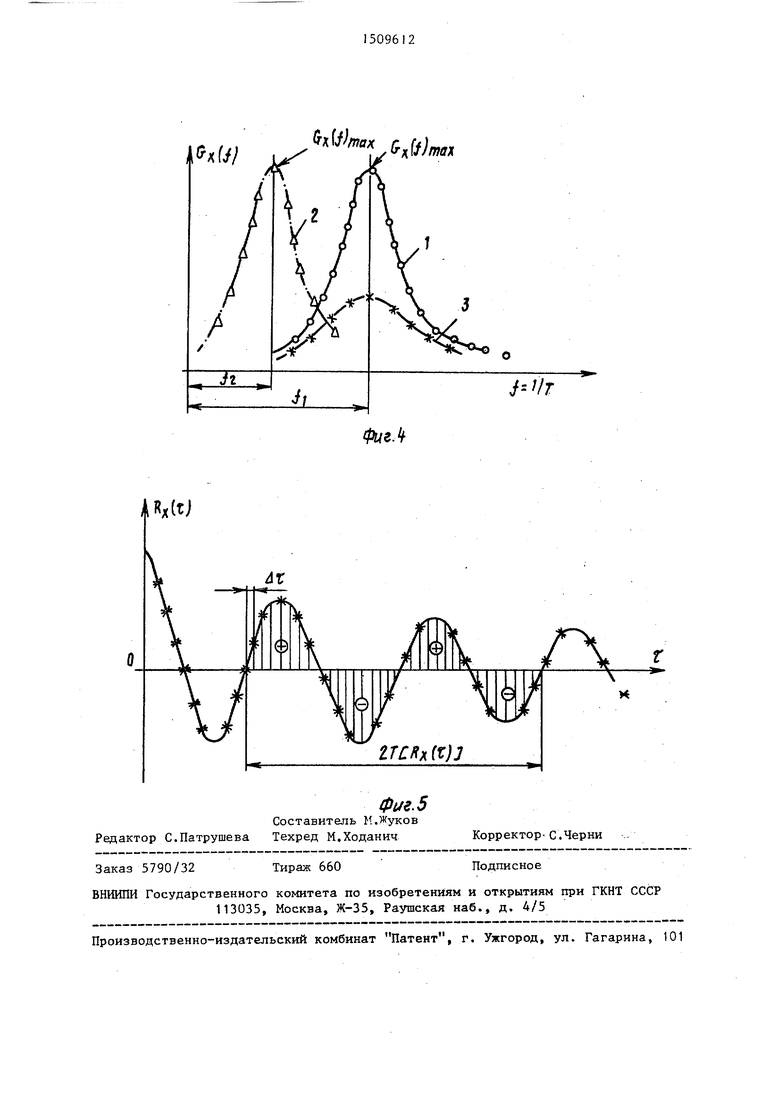
и 5 - кривые оценок спектральной плотности и автокорреляционной функции, полученные в процессе обработки реализации S(t) по программе, алгоритм которой приведен на фиг.З.
Цодрессоренная масса К автомобиля (фиг.1) изменяется в процессе его загрузки и от воздействия неровностей дороги или порционной загрузки колеблется на подвеске. Каждой величине подрессоренной массы М соответствует отличная по периоду гармоника собственных колебаний подрессоренных масс М на подвеске в реализации S(t), регистрируемой вибродатчиком 1, в процессе движения или порционной загрузки автомобиля.
сд
о ;о
Од N9
3150
Вычислительная система (фиг.2) для обработки реализации колебаний по-д- рессоренпых масс М автомобиля по предлагаемому способу типовая и сое- тоит из а 1алого-цифрового преобразователя 2, таймера 3, программно-запоминающего устройства 4, процессора 5 блока 6 индикации и оперативно-запоминающего устройства 7.
Выход вибродатчика 1, установленного на подрессоренпой массе М автомобиля, подключен к входу аналого- цифрового преобразователя 2, соединенного через таймер 3 с процессором 5, снабженным программно-запоминаю- щим устройством 4 и оперативно-запо- г-мнаюпщм устройством 7, а выход процессора 5 подключен к входу блока 6 ршдикации, связанного с оперативно- запоминающим устройством 7. Процессор 5 может быть выполнен на базе однокристального контроллера МК1816ВЕ48.
Обработка непрерывной реализации S(t) колебаний подрессоренных масс М производят процессором 5 по программе, алгоритм которой приведен на фи г. 3 .
Способ оценки массы груза автомо- биля осуществляется следующим образом .
Аналоговый сигнал, соответствую- щий непрерывной реализации колебаний S(t), с вибродатчика I подают на ана лого-цифровой преобразователь 2, где S(t) заменяется цифровым дис-кретным сигналом 3 (At) с максимальным шагом квантования по времени At. Сигнал .S(at) длиной i N, отсчитываемой таймером 3, поступает на вход процессора 5 и обрабатывается по программе записанной в программно-запоминающем устройстве 4, которое содержит также данные, характеризующие индивидуаль- ные параметры автомобиля, на котором монтируют устройство, реализующее предлагаемый способ.
Для назначения и ввода постоянных в ячейки памяти программно-запоминаю щего устройства 4 используются некоторые априорные сведения. Из экспери ментальных данных известно, что диапазон изменения частоты собственных колебаний автомобиля с грузом и без груза на подвеске находится в пределах 2-5 Гц. Согласно теореме Котель- никова для достаточно точного представления непрерывной реализации в
12
дискретной форме максимальньй шаг квантования а t по времени назначается из условия 1
At
2 f
МАКС
где f,. - максимальное значение частоты гармоники непрерывной реализации S(t), для представления ее в дискретной форме S (dt). Согласно указанному условию максимальньй шаг квантования для гармоники с частотой 5 Гц должен быть менее 0,1 с. Для по выщения точности представления дискретной реализацией S; (at) гармоники спектра, соответствующей собственным колебаниям подрессоренных масс автомобиля на подвеске, число значений, представляющих один период анализируемой гармоники, назначется равным 10, Исходя из этого, максимальный ша квантования At принимается равным 0,02 с. Для обработки реализации S(t по предлагаемому алгоритму следует проанализировать не менее трех колебаний с частотой 5 Гц. Отсюда, реализация S(t) должна быть представлена числовым массивом дискретной реализации не менее чем в 100 значений.
В примере конкретного.выполнения принимается число значений N, равное 120. Выбор такой длины массива для обработки продиктован тем, что при порционной загрузке автомобиля в силу демпфирующих свойств подвески наблюдается четкая реализация длиной в 3-4 периода собственных колебаний подрессоренных масс автомобиля на подвеске. Кроме того, увеличение числового массива ограничивается дальнейшими процедурными операциями и объемом памяти оперативно-запоминающего устройства 7 процессора 5, а также стремлением к уменьшению габаритных размеров (миниатюзировать штатный прибор для измерения массы груза автомобиля).
Для работы процессора 5 по программе (алгоритм на фиг.З) предварительно в ячейки памяти программно-запоминающего устройства 4 вводят исходные данные
ut, N, h, Ср Cg, li,, М„, fY(p) г(р),
где it- шаг квантования непрерывной реализации S(t) с вибродатчика 1 аналого-цифровым преобразователем 2, и ,02 с;
N - длина массива цифровой дискретной реализации цредстав- ляющая непрерывную -S(t), N 120;
h - число сдвигов, при вычислении автокорреляционной функции, h l,2,3,...,m; принимаем m 0,25;
С( иCg - жесткость основньк рессор соответственно передней и задней подвесок рессор,принимаем С 184 кг/см и С 714 кг/см, что соответствует параметрам подвески ав томобиля ЗИЛ-130;
нагрузки при которых включаются подрессорники автомо биля, М„ Of , т.е. перед- 1-1ие подрессорники отсутству ют (бесконечность можно заменить величинор на порядок выше грузоподъемности автомобиля, например для ЗИП- 130-50000 кг), K.j, 1500 кг;
f/(p)i
fgCp) - изменение жесткости подвески при включении подрессорников, f (р) 1 ; f (р) 1,22.
Алгоритм программы оценки массы груза по предлагаемому способу включает (фиг.З)
1, Вычисление среднего значения гпх дискретной реализации S (4t), предварительно записанной с аналого- цифрового преобразователя 2 в ячейки памяти оперативно-запоминающего устройства 7, по выражению
t: Jf
m
i-I. s.-(t).
значение m после вычислений с процессора 5 заносится в одну из ячеек памяти оперативно-запоминающего устройства 7.
2. Вычисление значений ординат автокорреляционной функции по выра:ке- нию
10
15
20.
25
30
35
40
45
значений периода Т собственных колебаний може выполняться непосредственно по времени изменения знака ординат оценки автокорреляционной функции (h4t).
3.Вычисление значений ординат оценки спектральной плотности по выражению
i : m
G:(f) 4j (ni}t)cos2jrfnflt,
l r(
где f - частота в интервале О,оз..
4.Определение периода по значе- ьшю абсциссы максимума спектральной плотности путем сравнительного анализа значений ординат оценки спектральной плотности.
Для режима движения автомобиля без груза вычисле)шя по алгоритму (фиг.З в зависимости от Выбора заканчивается на 3 ши 4 этапах и значения периода Т заносят в одну из ячеек памяти программно-запоминаюп1е- го устройства 3.
Счет в режиме движения автомобиля без груза выполняется заданное время, при этом вычисленные по нескольким реализациям колеба1шй значения периодов накапливаются в памяти оперативно-запоминающего устройства 7, а для последующих этапов вычислений используется среднее значение периода собственных колебаний из числа вычислений за время работы в режиме без груза. При этом полученное среднее значение периода возводится в квадрат и зановится в одну из ячеек памяти программно-запоминающего устройства 3 .
Алгоритм работы устройства по предлагаемому способу при загрузке автомобиля включает приведенные этапы вычислений. Вычисляемые при этом значения периодов колебаний используют в качестве аргумента функциональной зависимости Мр f (Т ) .
5.Определение массы И,- груза по выражению:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета веса груза,перевезенного в кузове автомобиля | 1981 |
|
SU963024A1 |
| Автомобильное весоизмерительное устройство | 1986 |
|
SU1357722A1 |
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| СПОСОБ ОЦЕНКИ ЖЕСТКОСТИ И ПРОЧНОСТИ АВТОДОРОЖНЫХ И ЖЕЛЕЗНОДОРОЖНЫХ МОСТОВ | 2011 |
|
RU2498255C2 |
| Устройство для учета массы груза и объема работы автомобиля | 1986 |
|
SU1402808A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ИЗОЛИРОВАННЫХ СЛОВ РЕЧИ С АДАПТАЦИЕЙ К ДИКТОРУ | 1994 |
|
RU2047912C1 |
| Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму | 2016 |
|
RU2626284C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1998 |
|
RU2130195C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЙ ПЧЕЛИНОЙ СЕМЬИ | 1998 |
|
RU2161883C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ СРОКА ЭКСПЛУАТАЦИИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2521682C2 |
Изобретение относится к приборостроению и может быть использовано в штатных приборах автотранспортных средств для измерения массы груза в кузове автомобиля и контроля выполненной им работы. Цель - повышение точности измерений массы груза и расширение области использования. В данном способе определяют значения периода собственных колебаний подрессоренных масс по абсциссам максимумов оценок спектральных плотностей и времени изменения знака ординат оценок автокорреляционных функций реализаций колебаний подрессоренных масс, а оценку массы груза выполняют по периодам, значения которых корректируют в соответствии с изменением жесткости подвески автомобиля в процессе его загрузки. 1 с. з.п.ф-лы. 5 ил.
y-h
.-сN-h 4|.(S-,(, -. - -mj .
После вычислений значений R,- (hat) ячейки памяти оперативно-запоминающего устройства 7 очищают от значений Sj- (ut) и на их место записывают значения R(hut). Согласно алгоритму процедура Выбор, определение
г,
- RaCi,g 2
( - т),
где К - тарироБочньй коэффициент, определяемый в процессе контрольного взвешивания; g - ускорение силы тяжести; Т - значение периода собственных колебаний подрессореннь:х масс автомоб 1пя без груза,
7 1
Т, занесено в ячейку памяти про граммно-3 апомин ающе го устройства 7;
Т - значение периода собствен- ных колебан1ш на подвеске подрессоренньпс масс автомобиля с грузом.
б. Вывод значения массы М на , сумматор блока 6 индикации с процес- сора 5 выполняют до тех пор, пока это значение не будет менее или равно М. При дальнейшей загрузке автомобиля с включением подрессорников значения Mf- , умножают на f (р) .
Параллельно вычисляют массу груза по второму каналу, и на сумматор индикатора выводят информацию Мр . Значения Mf- и Мр выводят на табло блока 6 индикации раздельно или сум- марно, что соответствует распределению массы груза по осям и общей массе груза автомобиля.
Для удобства представления блок 6 индикации выполняют в виде контура бокового вида автомобиля, по центру колес которого устанавливают индикаторные лампочки, а по месту кузова выполняют проем и из него выводят световое табло. При этом блок 6 инди кадии, в зависимости от хода сигналов по каналам работает в трех режимах: светится индикаторная лампочка центре переднего колеса (в центре заднего - не светится) - на световом табло информация о нагрузке (массе груза), приходящейся на переднюю очь светится индикаторная лампочка в центре заднего колеса (в центре переднего - не светится) - на световом табло информация о нагрузке (массе груза), приходящейся на заднюю ось; светятся обе индикаторные лампочки - на световом табло информация о массе груза в кузове автомобиля.
Согласно проведенной цифровой обработке сигналов по первому каналу в процессе загрузки автомобиля период т собственных колебаний подрессоренных масс изменился с 0,204 с (часто- та 4,9 Гц) на 0,476 с (частота 2,1 Гц Дальнейшее вычисление по приведенному алгоритму- показало, что это соответствует загрузке передней оси авто
мобиля ЗИЛ 130 на 845 кг.
I/По второму каналу период Т соответственно изменился с 0,2 с (частота 5 Гц) на 0,526 с (частота 1,9 Гц) чтр соответствует грузу массой
8
4203 кг. Таким образом масса груза в кузове автомобиля ЗИЛ-130 равна 5048 кг для сравнения грузоподъемность рассматриваемого автомобиля согласно его технической характеристики 5000 кг.
Из условий упрощения и уменьшения габаритов устройства, реализующего предлагаемый способ оценки груза автомобиля, предпочтительным является определение периода собственных коле баний по времени изменения знака автокорреляционной функции (фиг,5). Это объясняется тем, что спектральная плотность и автокорреляционная функция реализаций, как известно,связаны между собой преобразованием Фурье, что в дискретном цифровом виде представляется следующим выражением:
оо
Gi(f) 4 J (ut)cos 2J fut dt (интегрирование автокорреляционной функции) .
Определение периода колебаний по абсциссам максимумов спектральных плотностей соответствует нахождению равенства нулю производной от спектральной плотно сти (дифференцированию спектральной плот гасти), т.е. установление значения периода колебаний по времени изменения знака автокорреляционной функции тождественно определению этого параметра по абсциссе максимума спектральной плотности при значительном сокращении числа операций вычислений.
Следует отметить, что положение максимума оценки спектральной плотности G(f) не зависит от длины обрабатываемой реализации, т.е. числа N. Это позволяет значительно сократить длину обрабатываемого массива. На фиг.4 приведены графики спектраль .ных плотностей. Кривая 1 соответствует колебаниям подрессоренных масс автомобиля без груза, а кривая 2-е грузом, при этом максимум первой из них соответствует частоте f 5,0 Гц, а максимум второй - частоте f 1,9 Гц. Для доказательства независимости положения максимумов оценки спектральной плотности от длины обрабатываемой реализации на фиг.4 приведена кривая 3, соответствующая укороченной реализации. Увеличение длины обрабатываемого массива (при постоянном шаге квантования ) приводит лишь к изменению крутизны графиков.
Формула изобретения
Фиг. 2
ний подрессоренных масс с грузом и без груза на подаеске преобразуют в дискретный цифровой сигнал с максимальным шагом квантования, после чего вычисляют оценки спектральной плотности полученного сигнала, по абсциссам максимумов которых устанавливают значения периодов собственных колебаний, а массу груза определяют
путем умножения полученных значений на функцию Iiзмeнeния жесткости подвесок автомобиля от загрузки.
С
, fu.z. J
Нет
xfy;
,; fy;,
/
.
;
dt
1
Редактор С.Патрушева
Фtfs.5
Составитель М.Жуков Техред М.Ходанич
Заказ 5790/32
Тираж 660
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ CCCI 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
;
//Г
ФигЛ
Корректор-С.Черни
Подписное
| Пилипович В.А | |||
| и др | |||
| Дисковая паровая турбина | 1922 |
|
SU580A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автомобильное весоизмерительное устройство | 1986 |
|
SU1357722A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
