Изобретение относится к электротехнике и может быть использовано во всех отраслях народного хозяйства в составе средств измерений и автоматики при измерении количества включений и времени работы различных механизмов.
Цель изобретения - повышение надежности .
На чертеже изображена кинематическая схема датчика.
Электромеханический датчик содержит корпус 1 с крышкой 2, в котором закреплены неподвижные контакты 3 и 4. В нижней части шарнирно на оси закреплен подвижный элемент 5, к которому жестко крепится перекидной держатель 6 в виде пластинчатой пружины с подвижными контактами 7 и 8. Посредством рабочей пружины 9 сжатия с шарнирными наконечниками 10 и 11 подвижный элемент 5 соединен с промежуточным элементом 12, который при помощи стопорного винта 13 крепится на приводном штоке 14 органа управления . Ход штока ограничивается во избежание повреждений ограничительны1. Электромеханический датчик, со- держаш 1й корпус, неподвижные контакты, перекидной держатель, несушд1Й
ми шайбами 13 и 16, закрепленными на приводном штоке 14 при помощи шплин- ЗО подвижные контакты, который шарнирно тов. Возврат приводного штока 14 вустановлен на корпусе, орган управлеисходное положение осуществляется воз- ния и механизм мгновенного действия, вратной пружиной 17. Датчик может ра- вютючаюшдй в себя подвижный элемент, ботать и без этой пружины, но в этомсвязанный с перекидным держателем
случае на приводной шток 14 должно , подвижных контактов, и пружину сжа- осуществляться двустороннее воздействие со стороны контролируемого механизма.
Датчик работает следующим образом.
тия, отличающийся тем, что, с целью повышения надежности, перекидной держатель подвижных контактов вьтолнен в виде пластинчатой
р абочей пружины 9 и силами трения в . шарнирах наконечников 10 и 11, направлен на увеличение прижима контактов. Влияние этого момента наиболее ощутимо при подходе пружины к нейтрали. При дальнейшем перемещении промежуточного элемента 12 перекидной держатель 6, расправляясь, способствует перебросу подвижного элемента 5 в другое положение и резкому размыканию контактов. Регулировка момента срабатьшания осуществляется путем перемещения промежуточного элемента
12 по приводному штоку 14 с фиксацией его в требуемом положении стопорным винтом 13.
Применение предлагаемого датчика позволит повысить точность измерения
количества включений и времени работы механизмов, а также эффективность устройств автоматики за счет более четких электрических сигналов, характеризующих рабочее и нерабочее состояния механизмов. Формула изобретения
1. Электромеханический датчик, со- держаш 1й корпус, неподвижные контакты, перекидной держатель, несушд1Й
подвижные контакты, который шарнирно установлен на корпусе, орган управле подвижных контактов, и пружину сжа-
тия, отличающийся тем, что, с целью повышения надежности, перекидной держатель подвижных контактов вьтолнен в виде пластинчатой
| название | год | авторы | номер документа |
|---|---|---|---|
| Переключатель | 1972 |
|
SU494889A3 |
| Выключатель мгновенного действия | 1983 |
|
SU1157583A1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМА ГРУЗОЗАХВАТНОГО УСТРОЙСТВА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2401793C1 |
| Коммутационное устройство | 1979 |
|
SU888232A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для резки рулонного материала | 2017 |
|
RU2653749C1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Кольцевой кантователь | 1990 |
|
SU1761420A1 |
| Аппарат искусственной вентиляции легких | 2020 |
|
RU2738769C1 |
Изобретение относится к электротехнике и может быть использовано для измерения количества включений и времени работы различных механизмов. Цель изобретения - повышение надежности. Электромеханический датчик содержит неподвижные контакты 3 и 4, подвижные контакты 7 и 8, механизм мгновенного действия, включающий в себя подвижный элемент 5 и пружину сжатия 9, орган управления, выполненный в виде приводного штока 14 и промежуточного элемента 12, который крепится на приводном штоке 14 в требуемом положении. Подвижные контакты 7 и 8 расположены на перекидном держателе 6, который выполнен в виде пластинчатой пружины, что позволяет увеличить скорость переключения контактов. 1 з.п. ф-лы, 1 ил.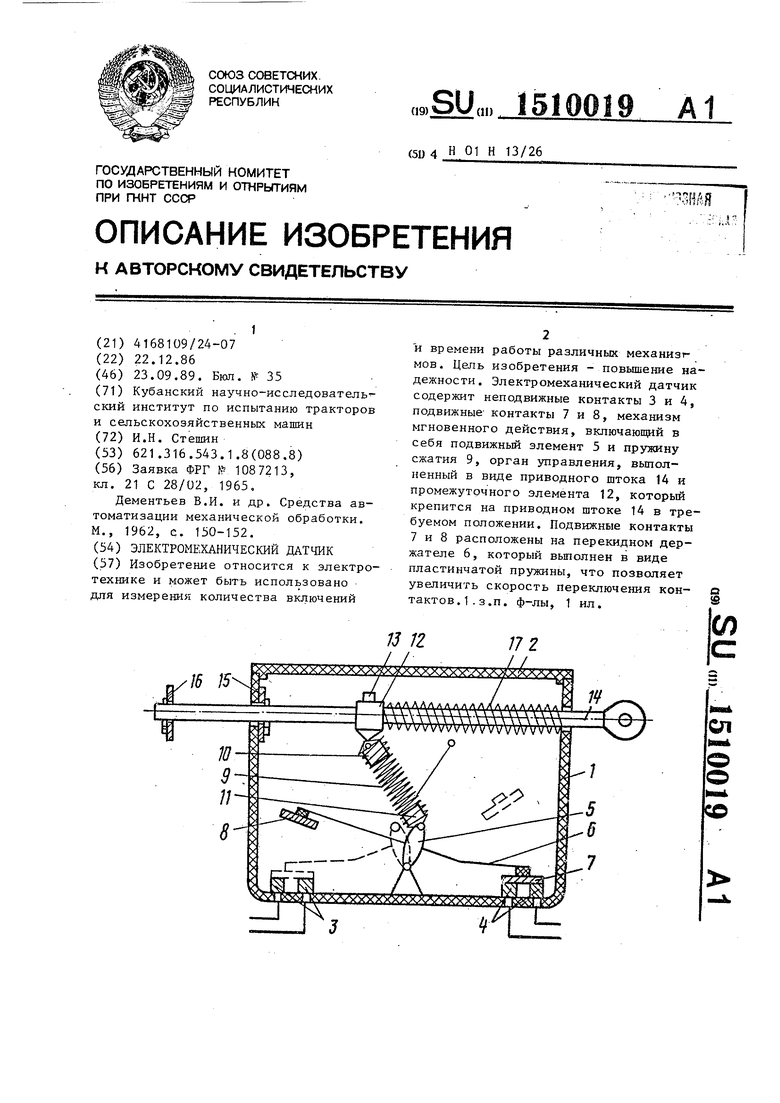
При нахождении подвижного элемен- 0 пружины и закреплен на подвижном
та 5 в одном из крайних положений рабочая пружина 9 прижимает через подвижный элемент 5 и перекидной держатель 6 подвижный контакт 7 к неподвижным 4 (или контакт 8 к контактам 3). -с При перемещении приводного штока 14 промежуточный элемент 12 увеличивает сжатие рабочей пружины 9 и, следовательно, увеличивает давление на под- вижньш элемент 5. Момент от усилия, вызванного поперечной жесткостью
50
элементе механизма мгновенного де вия, а пружина сжатия расположена между органом управления и подвиж элементом.
Редактор А. Мотыль
НИИ.
Составитель Л. Новикова
Техред А.Кравчук Корректор. Малец
элементе механизма мгновенного действия, а пружина сжатия расположена между органом управления и подвижным элементом.
| Конвейерная моечная машина | 1982 |
|
SU1087213A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Дементьев В.И | |||
| и др | |||
| Средства автоматизации механической обработки | |||
| М., 1962, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
